BiDexHand: Design and Evaluation of an Open-Source 16-DoF Biomimetic Dexterous Hand
作者: Zhengyang Kris Weng
分类: cs.RO
发布日期: 2025-04-20 (更新: 2025-10-06)
备注: ICRA 2025 Dexterity Workshop, Spotlight Presentation
💡 一句话要点
BiDexHand:一款开源的16自由度仿生灵巧手设计与评估
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人手 灵巧操作 仿生设计 开源硬件 线缆驱动
📋 核心要点
- 现有机器人手在实现人类水平的灵巧性方面面临挑战,限制了其在多样化应用中的通用性。
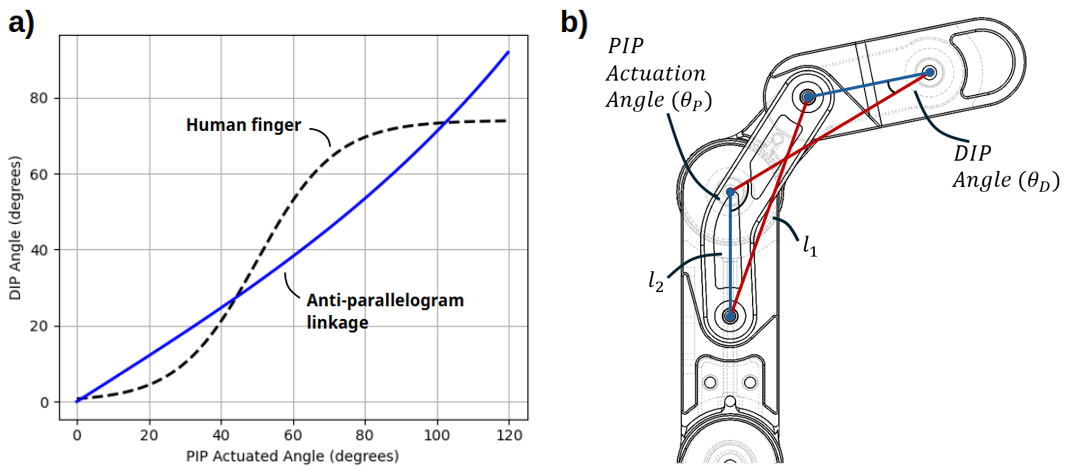
- BiDexHand通过线缆驱动和仿生设计,结合独立驱动自由度和机械耦合关节,实现了类人灵巧性。
- 实验验证表明,BiDexHand在多种抓取测试中表现出色,并具备一定的力量和操作能力。
📝 摘要(中文)
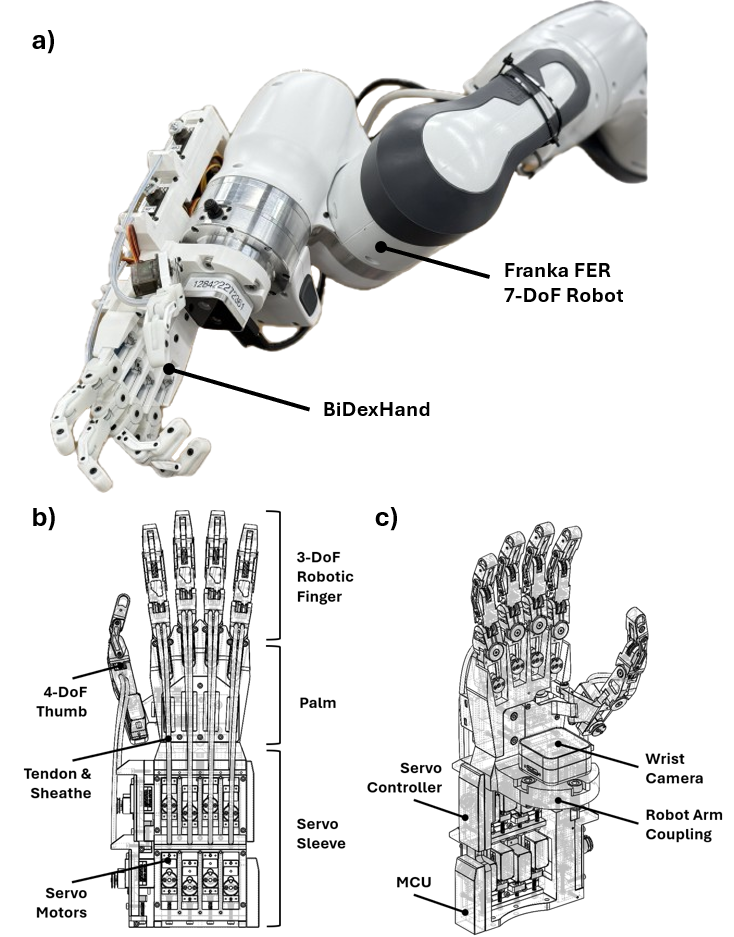
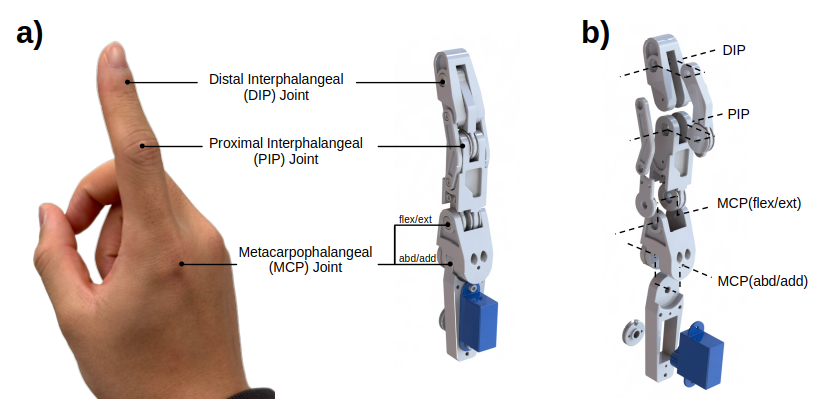
本研究介绍BiDexHand,一款线缆驱动的仿生机器人手,旨在兼顾类人灵巧性和易于获取且高效的机械设计,以应对机器人手在各种应用中实现人类水平灵巧性的根本挑战。该机器人手具有16个独立驱动的自由度,并通过新颖的指节设计实现5个机械耦合关节,从而复制自然的指部运动。性能验证表明,该手成功完成了GRASP分类法中的所有33种抓取类型,Kapandji拇指对掌测试中的11个位置中的9个,测得的指尖力为2.14牛,并能够举起10磅的重物。BiDexHand作为一个支持包括基于视觉的遥操作在内的多种控制模式的开源平台,旨在为更广泛的机器人研究社区普及先进的操纵能力。
🔬 方法详解
问题定义:现有机器人手在灵巧性和易用性之间存在权衡。高性能的机器人手往往结构复杂、成本高昂,难以普及。而低成本的机器人手通常灵巧性不足,无法完成复杂的操纵任务。因此,需要设计一种既具有较高灵巧性,又易于制造和使用的机器人手。
核心思路:BiDexHand的核心思路是采用仿生设计,模仿人类手的结构和运动方式,同时采用线缆驱动方式,实现多个自由度的独立控制。通过巧妙的机械耦合设计,简化了控制难度,提高了系统的可靠性。
技术框架:BiDexHand的整体架构包括:1)机械结构设计,包括手指、手掌和驱动机构;2)线缆驱动系统,负责将电机动力传递到各个关节;3)控制系统,实现对各个自由度的精确控制;4)视觉系统(可选),用于实现基于视觉的遥操作。
关键创新:BiDexHand的关键创新在于其独特的指节设计,通过机械耦合实现了自然的指部运动。此外,该手采用开源设计,降低了使用门槛,促进了机器人手技术的普及。
关键设计:BiDexHand具有16个独立驱动的自由度,每个手指具有多个关节。线缆驱动系统采用合理的布局,保证了动力传递的效率和精度。控制系统支持多种控制模式,包括基于视觉的遥操作。指尖力测量结果为2.14N,能够举起10磅重物。
🖼️ 关键图片
📊 实验亮点
BiDexHand在GRASP分类法中的所有33种抓取类型中均取得了成功,表明其具有广泛的抓取能力。在Kapandji拇指对掌测试中,该手在11个位置中的9个位置上表现出色,验证了其拇指的灵活性。测得的指尖力为2.14牛,能够举起10磅的重物,表明其具有一定的力量。开源设计降低了研究和开发的门槛。
🎯 应用场景
BiDexHand具有广泛的应用前景,包括:工业自动化、医疗康复、远程操作、人机交互等。在工业自动化领域,它可以用于执行精细的装配和操作任务。在医疗康复领域,它可以作为康复训练设备,帮助患者恢复手部功能。在远程操作领域,它可以用于在危险环境中进行操作。在人机交互领域,它可以作为虚拟现实和增强现实的交互设备。
📄 摘要(原文)
Achieving human-level dexterity in robotic hands remains a fundamental challenge for enabling versatile manipulation across diverse applications. This extended abstract presents BiDexHand, a cable-driven biomimetic robotic hand that combines human-like dexterity with accessible and efficient mechanical design. The robotic hand features 16 independently actuated degrees of freedom and 5 mechanically coupled joints through novel phalange designs that replicate natural finger motion. Performance validation demonstrated success across all 33 grasp types in the GRASP Taxonomy, 9 of 11 positions in the Kapandji thumb opposition test, a measured fingertip force of 2.14\,N, and the capability to lift a 10\,lb weight. As an open-source platform supporting multiple control modes including vision-based teleoperation, BiDexHand aims to democratize access to advanced manipulation capabilities for the broader robotics research community.