Performance Analysis of a Mass-Spring-Damper Deformable Linear Object Model in Robotic Simulation Frameworks
作者: Andrea Govoni, Nadia Zubair, Simone Soprani, Gianluca Palli
分类: cs.RO
发布日期: 2025-04-18
DOI: 10.1007/978-3-031-89471-8_29
💡 一句话要点
基于质-弹簧-阻尼模型的柔性线性物体在机器人仿真框架中的性能分析
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 柔性线性物体 质-弹簧-阻尼模型 域随机化 机器人仿真 Isaac Sim Gazebo 动态建模
📋 核心要点
- 精确模拟柔性线性物体(DLO)的动态行为是机器人自动化任务的关键,但DLO的柔性和可变形特性使其建模极具挑战。
- 该研究采用质-弹簧-阻尼(MSD)系统作为参考模型,通过域随机化(DR)方法收集力数据,用于训练机器人仿真。
- 通过Isaac Sim和Gazebo仿真平台,评估模型参数变化对DLO动力学的影响,验证DR技术在机器人仿真场景中的适用性。
📝 摘要(中文)
由于电缆、导线和细绳等柔性线性物体(DLO)的柔性和可变形特性,对其进行建模提出了重大挑战。在机器人技术中,精确模拟DLO的动态行为对于自动化诸如导线处理和组装之类的任务至关重要。本研究是一项初步分析,旨在通过域随机化(DR)收集力数据,以使用质-弹簧-阻尼(MSD)系统作为参考模型来训练机器人进行仿真。该研究旨在评估模型参数变化对DLO动力学的影响,并使用Isaac Sim和Gazebo来验证DR技术在这些场景中的适用性。
🔬 方法详解
问题定义:论文旨在解决机器人仿真中柔性线性物体(DLOs)动态行为建模的难题。现有方法在处理DLOs的复杂形变和动态特性时,精度和效率往往难以兼顾,限制了机器人自动化任务的可靠性。特别是在线缆操作、装配等任务中,精确的DLOs模型至关重要。
核心思路:论文的核心思路是利用质-弹簧-阻尼(MSD)模型来近似DLOs的动态行为,并通过域随机化(DR)技术来提高模型在不同仿真环境中的泛化能力。MSD模型通过离散化DLOs,将连续的形变问题转化为离散的质点运动问题,简化了计算复杂度。DR技术则通过在仿真过程中随机改变模型参数,使训练得到的策略对参数变化具有鲁棒性。
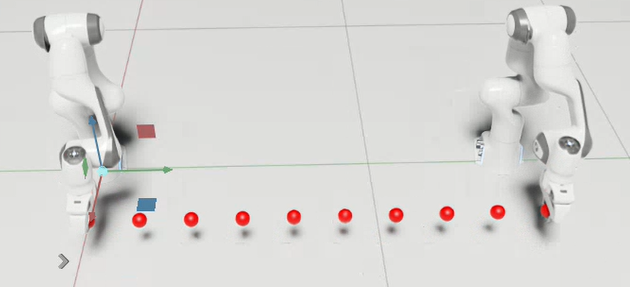
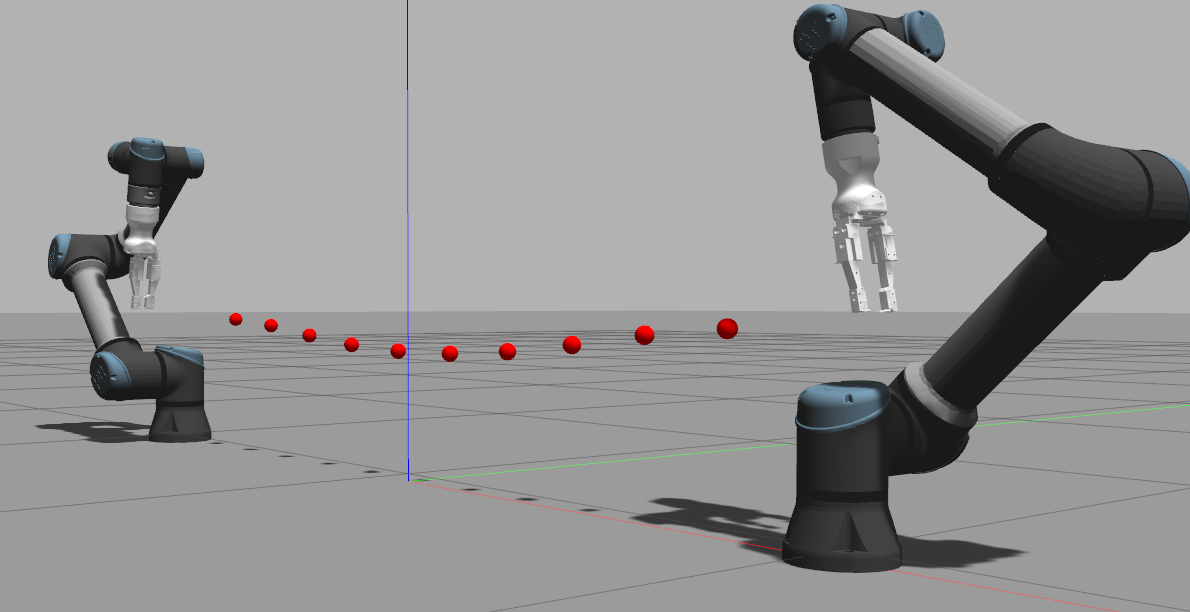
技术框架:整体框架包括以下几个主要步骤:1) 使用MSD模型对DLOs进行建模;2) 在Isaac Sim和Gazebo等机器人仿真环境中,对MSD模型进行仿真;3) 通过域随机化技术,在仿真过程中随机改变MSD模型的参数(如质量、弹簧系数、阻尼系数等);4) 收集仿真数据,包括DLOs受到的力、位置、速度等信息;5) 使用收集到的数据训练机器人控制策略。
关键创新:该研究的关键创新在于将域随机化技术应用于MSD模型的参数优化,从而提高模型在不同仿真环境中的泛化能力。传统的MSD模型通常需要精确的参数标定,而DR技术可以避免这一过程,使模型能够适应不同的DLOs和仿真环境。
关键设计:论文的关键设计包括:1) MSD模型的参数选择和优化策略;2) 域随机化的参数范围和分布;3) 仿真环境的设置和数据收集方法;4) 机器人控制策略的设计和训练方法。具体的参数设置和损失函数等技术细节在摘要中未提及,属于未知信息。
🖼️ 关键图片

📊 实验亮点
该研究是一项初步分析,主要侧重于方法验证和数据收集流程的建立。摘要中没有提供具体的性能数据或对比基线。其主要贡献在于探索了域随机化技术在柔性物体仿真中的应用潜力,为后续研究奠定了基础。
🎯 应用场景
该研究成果可应用于机器人自动化领域,特别是在需要精确控制柔性物体的任务中,如线缆装配、医疗手术机器人、以及其他需要处理细长物体的场景。通过提高仿真模型的精度和泛化能力,可以降低实际部署的成本和风险,加速机器人技术的应用。
📄 摘要(原文)
The modelling of Deformable Linear Objects (DLOs) such as cables, wires, and strings presents significant challenges due to their flexible and deformable nature. In robotics, accurately simulating the dynamic behavior of DLOs is essential for automating tasks like wire handling and assembly. The presented study is a preliminary analysis aimed at force data collection through domain randomization (DR) for training a robot in simulation, using a Mass-Spring-Damper (MSD) system as the reference model. The study aims to assess the impact of model parameter variations on DLO dynamics, using Isaac Sim and Gazebo to validate the applicability of DR technique in these scenarios.