Humanoid Agent via Embodied Chain-of-Action Reasoning with Multimodal Foundation Models for Zero-Shot Loco-Manipulation
作者: Congcong Wen, Geeta Chandra Raju Bethala, Yu Hao, Niraj Pudasaini, Hao Huang, Shuaihang Yuan, Baoru Huang, Anh Nguyen, Mengyu Wang, Anthony Tzes, Yi Fang
分类: cs.RO, cs.AI
发布日期: 2025-04-13 (更新: 2025-10-06)
备注: website link: https://humanoid-coa.github.io/
💡 一句话要点
提出Humanoid-COA,通过具身行动链推理和多模态基础模型实现人形机器人零样本Loco-Manipulation
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 人形机器人 Loco-manipulation 具身行动链 多模态基础模型 零样本学习 可供性分析 空间推理
📋 核心要点
- 现有方法难以将人类指令转化为连贯的具身行动序列,限制了人形机器人在复杂环境中的Loco-manipulation能力。
- Humanoid-COA框架通过具身行动链(CoA)机制,将高层指令分解为运动和操作原语序列,实现有效的推理。
- 实验表明,Humanoid-COA在多种任务中显著优于现有基线,展现了对长时程和非结构化场景的良好泛化能力。
📝 摘要(中文)
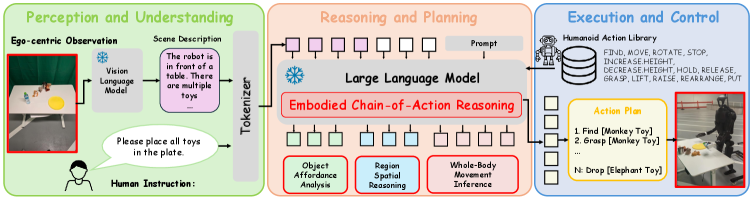
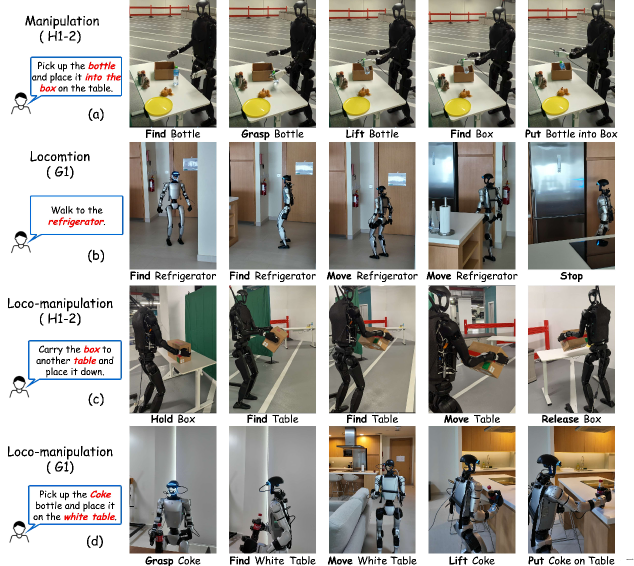
人形机器人Loco-manipulation(即融合全身运动与灵巧操作)是机器人领域的一项根本性挑战。除了全身协调和平衡之外,核心难点在于理解人类指令并将其转化为连贯的具身行动序列。近年来,基础模型在可迁移的多模态表征和推理能力方面取得了显著进展,但现有研究主要局限于孤立的运动或操作,在人形机器人环境中的适用性有限。本文提出了Humanoid-COA,这是第一个将基础模型推理与具身行动链(CoA)机制相结合的人形机器人框架,用于零样本Loco-manipulation。在感知-推理-行动范式中,我们的主要贡献在于推理阶段,提出的CoA机制通过可供性分析、空间推理和全身行动推理,将高层人类指令分解为结构化的运动和操作原语序列。在Unitree H1-2和G1两种人形机器人上,于开放测试区域和公寓环境中进行的大量实验表明,我们的框架在操作、运动和Loco-manipulation任务中显著优于现有基线,实现了对长时程和非结构化场景的鲁棒泛化。
🔬 方法详解
问题定义:论文旨在解决人形机器人Loco-manipulation任务中,如何将人类高层指令转化为机器人可执行的运动和操作序列的问题。现有方法通常难以有效地整合全身运动和灵巧操作,尤其是在复杂和非结构化的环境中,泛化能力不足。
核心思路:论文的核心思路是利用多模态基础模型的强大推理能力,结合具身行动链(Embodied Chain-of-Action, CoA)机制,将高层指令分解为一系列结构化的运动和操作原语。通过可供性分析、空间推理和全身行动推理,实现对复杂任务的理解和规划。
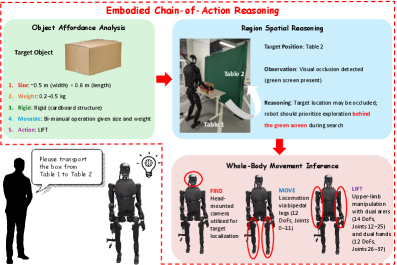
技术框架:Humanoid-COA框架遵循感知-推理-行动的范式。感知模块负责获取环境信息;推理模块是核心,通过CoA机制将高层指令分解为运动和操作原语序列;行动模块则执行规划好的动作。CoA机制包含可供性分析(Affordance Analysis)、空间推理(Spatial Inference)和全身行动推理(Whole-body Action Reasoning)三个关键步骤。
关键创新:该论文最重要的技术创新在于提出的具身行动链(CoA)机制,它能够有效地将高层人类指令分解为结构化的运动和操作原语序列。与现有方法相比,CoA机制更注重对环境的理解和对机器人自身能力的建模,从而实现更鲁棒和泛化的Loco-manipulation。
关键设计:CoA机制中的可供性分析模块用于识别环境中可交互的对象及其属性;空间推理模块用于确定机器人与对象之间的相对位置关系;全身行动推理模块则根据可供性和空间关系,生成具体的运动和操作指令。论文中可能使用了特定的损失函数来优化CoA的推理过程,并可能针对人形机器人的运动学和动力学特性进行了专门的设计(具体细节未知)。
🖼️ 关键图片
📊 实验亮点
Humanoid-COA框架在Unitree H1-2和G1两种人形机器人上进行了实验,并在开放测试区域和公寓环境中验证了其有效性。实验结果表明,该框架在操作、运动和Loco-manipulation任务中显著优于现有基线,实现了对长时程和非结构化场景的鲁棒泛化。具体的性能数据和提升幅度需要在论文原文中查找。
🎯 应用场景
该研究成果可应用于家庭服务机器人、工业自动化、灾难救援等领域。通过理解人类指令并执行复杂的Loco-manipulation任务,人形机器人能够更好地适应各种复杂环境,完成诸如物品整理、设备维护、救援行动等任务,具有重要的实际应用价值和广阔的发展前景。
📄 摘要(原文)
Humanoid loco-manipulation, which integrates whole-body locomotion with dexterous manipulation, remains a fundamental challenge in robotics. Beyond whole-body coordination and balance, a central difficulty lies in understanding human instructions and translating them into coherent sequences of embodied actions. Recent advances in foundation models provide transferable multimodal representations and reasoning capabilities, yet existing efforts remain largely restricted to either locomotion or manipulation in isolation, with limited applicability to humanoid settings. In this paper, we propose Humanoid-COA, the first humanoid agent framework that integrates foundation model reasoning with an Embodied Chain-of-Action (CoA) mechanism for zero-shot loco-manipulation. Within the perception--reasoning--action paradigm, our key contribution lies in the reasoning stage, where the proposed CoA mechanism decomposes high-level human instructions into structured sequences of locomotion and manipulation primitives through affordance analysis, spatial inference, and whole-body action reasoning. Extensive experiments on two humanoid robots, Unitree H1-2 and G1, in both an open test area and an apartment environment, demonstrate that our framework substantially outperforms prior baselines across manipulation, locomotion, and loco-manipulation tasks, achieving robust generalization to long-horizon and unstructured scenarios. Project page: https://humanoid-coa.github.io/