DoorBot: Closed-Loop Task Planning and Manipulation for Door Opening in the Wild with Haptic Feedback
作者: Zhi Wang, Yuchen Mo, Shengmiao Jin, Wenzhen Yuan
分类: cs.RO
发布日期: 2025-04-12
备注: In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2025)
💡 一句话要点
DoorBot:利用触觉反馈的门开启闭环任务规划与操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人操作 触觉反馈 闭环控制 任务规划 铰接物体操作
📋 核心要点
- 现有方法难以应对真实场景中门的多样性,如不同的门类型、机械结构和推拉方式,泛化能力不足。
- 提出一种触觉感知的闭环分层控制框架,机器人能根据实时力反馈动态调整策略,从而适应不同类型的门。
- 在20个不同建筑的未知门上测试,成功率达到90%,验证了框架的泛化性和鲁棒性。
📝 摘要(中文)
在非结构化环境中运行的机器人面临与日常物体(如门)交互的重大挑战,尤其难以泛化到不同的门类型和条件。现有的基于视觉和开环规划的方法通常缺乏处理不同门设计、机制以及推/拉配置的鲁棒性。本文提出了一种触觉感知的闭环分层控制框架,使机器人能够在各种真实环境中探索和打开不同的未知门。该方法利用实时触觉反馈,使机器人能够根据操作过程中的力反馈动态调整其策略。我们在不同建筑物的20个未知门上测试了该系统,这些门具有不同的外观和机械类型。我们的框架实现了90%的成功率,证明了其泛化能力和处理各种开门任务的鲁棒性。这种可扩展的解决方案在更广泛的开放世界铰接物体操作任务中具有潜在的应用。
🔬 方法详解
问题定义:论文旨在解决机器人如何在真实、非结构化的环境中,鲁棒地打开各种各样的门的问题。现有方法主要依赖视觉信息或采用开环控制,难以应对门的类型多样性(推拉、材质、把手位置等)以及环境变化带来的干扰,导致泛化能力差。这些方法通常需要精确的门模型或者预先编程的动作序列,难以适应未知环境。
核心思路:论文的核心思路是利用触觉反馈来弥补视觉信息的不足,并采用闭环控制策略,使机器人能够根据实际操作过程中产生的力反馈动态调整动作。通过触觉感知,机器人可以更好地理解门的状态(例如,是否被卡住,需要多大的力才能打开),从而做出更合适的决策。这种闭环反馈机制增强了系统的鲁棒性和适应性。
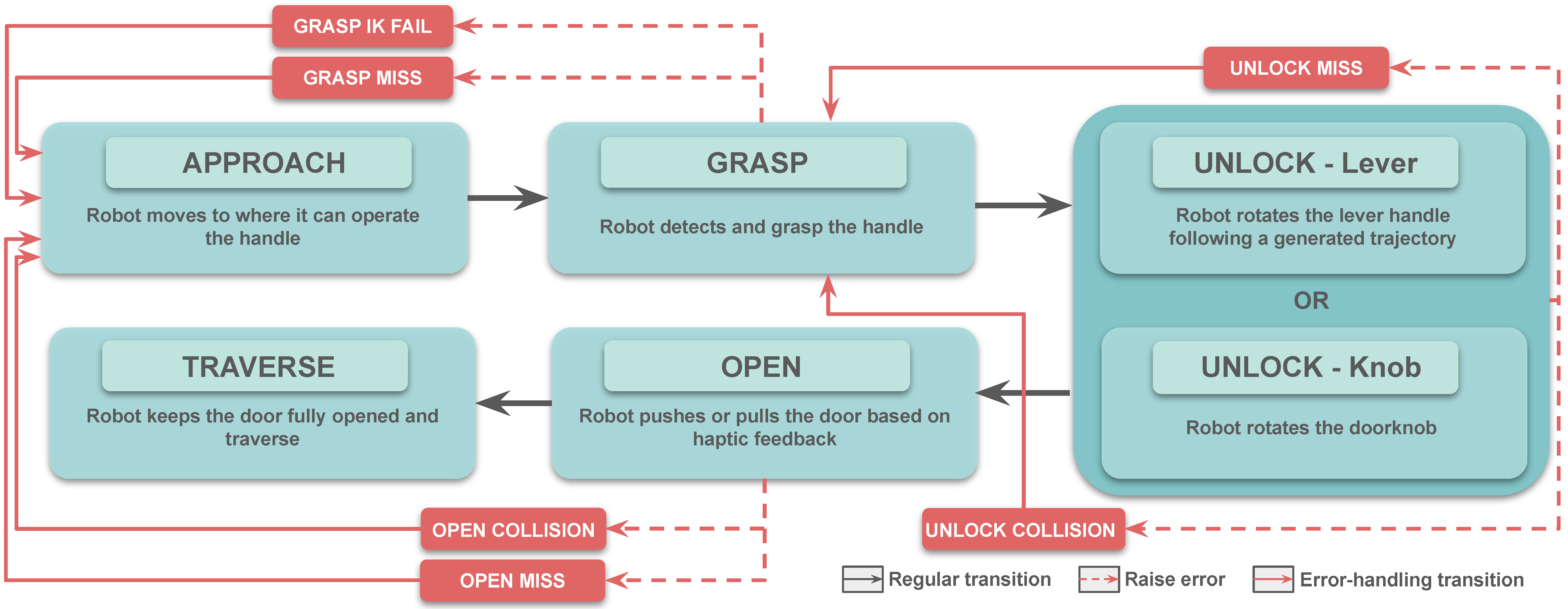
技术框架:该框架采用分层控制结构,包含以下主要模块:1) 任务规划层:根据当前环境和目标,生成高层次的动作序列(例如,靠近门,抓住把手,推/拉门)。2) 运动控制层:将高层次的动作转化为具体的机器人运动指令。3) 触觉感知层:实时采集机器人与门交互过程中的力/力矩信息。4) 反馈控制层:根据触觉感知层的信息,调整运动控制层的指令,实现闭环控制。整个流程是一个迭代的过程,机器人不断地感知、调整、执行,直到成功打开门。
关键创新:最重要的技术创新点在于将触觉反馈融入到门开启任务的闭环控制中。与传统的视觉主导或开环控制方法不同,该方法能够实时感知机器人与门之间的交互力,并根据这些力信息调整机器人的动作,从而提高系统的鲁棒性和适应性。这种触觉感知的闭环控制策略使得机器人能够更好地应对未知环境和门类型的挑战。
关键设计:论文中关键的设计包括:1) 触觉传感器的选择和安装:选择合适的力/力矩传感器,并将其安装在机器人的末端执行器上,以便准确地测量机器人与门之间的交互力。2) 反馈控制算法的设计:设计合适的反馈控制算法,将触觉信息转化为运动控制指令的调整量。例如,可以使用PID控制或者更复杂的自适应控制算法。3) 任务规划策略:设计合理的任务规划策略,指导机器人完成开门任务。例如,可以使用基于规则的任务规划或者基于学习的任务规划。
🖼️ 关键图片


📊 实验亮点
该框架在20个不同的真实门上进行了测试,这些门具有不同的外观和机械结构。实验结果表明,该框架能够以90%的成功率打开这些门,显著优于传统的基于视觉或开环控制的方法。这一结果验证了该框架的泛化能力和鲁棒性,表明其能够在真实环境中有效地完成开门任务。
🎯 应用场景
该研究成果可应用于家庭服务机器人、医疗辅助机器人、安保巡逻机器人等领域。这些机器人需要在各种复杂环境中与物体进行交互,而开门是其中一项基本且重要的任务。该技术能够提高机器人在未知环境中的自主性和适应性,使其能够更好地完成各种服务任务。未来,该技术还可以扩展到其他铰接物体的操作,例如打开抽屉、操作开关等。
📄 摘要(原文)
Robots operating in unstructured environments face significant challenges when interacting with everyday objects like doors. They particularly struggle to generalize across diverse door types and conditions. Existing vision-based and open-loop planning methods often lack the robustness to handle varying door designs, mechanisms, and push/pull configurations. In this work, we propose a haptic-aware closed-loop hierarchical control framework that enables robots to explore and open different unseen doors in the wild. Our approach leverages real-time haptic feedback, allowing the robot to adjust its strategy dynamically based on force feedback during manipulation. We test our system on 20 unseen doors across different buildings, featuring diverse appearances and mechanical types. Our framework achieves a 90% success rate, demonstrating its ability to generalize and robustly handle varied door-opening tasks. This scalable solution offers potential applications in broader open-world articulated object manipulation tasks.