Pogobot: an Open-Source, Low-Cost Robot for Swarm Robotics and Programmable Active Matter
作者: Alessia Loi, Loona Macabre, Jérémy Fersula, Keivan Amini, Leo Cazenille, Fabien Caura, Alexandre Guerre, Stéphane Gourichon, Laurent Fabre, Olivier Dauchot, Nicolas Bredeche
分类: cs.RO, cs.AI, cs.MA
发布日期: 2025-04-11 (更新: 2025-11-07)
💡 一句话要点
Pogobot:用于群体机器人和可编程活性物质研究的开源低成本机器人平台
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 群体机器人 活性物质 开源平台 低成本机器人 自组织系统 机器人通信 模块化设计
📋 核心要点
- 现有群体机器人平台成本较高,功能受限,难以满足大规模实验和复杂算法研究的需求。
- Pogobot平台采用模块化设计,集成了多种传感器和通信方式,并提供易于使用的API,降低了研究门槛。
- 超过200个Pogobot已在多所大学使用,验证了其在自组织系统、活性物质等研究中的有效性。
📝 摘要(中文)
本文介绍了一个名为Pogobot的开源平台,该平台专为群体机器人和活性物质交叉领域的研究而设计。Pogobot具有基于振动或轮式的运动方式、快速红外通信以及一系列传感器,且成本效益高(约250欧元/台)。该平台的模块化设计、全面的API和可扩展的架构,有助于实现群体智能算法和集体运动。Pogobot在提供紧凑外形的同时,还提供了现有平台不具备的先进功能,包括单元之间的定向通信和快速运动,是现有平台的一种经济实惠的替代方案。目前,已有200多个Pogobot在多所大学中被日常使用,用于研究自组织系统、可编程活性物质、离散反应-扩散-对流系统以及社会学习和进化的计算模型。本文详细介绍了Pogobot的硬件和软件架构、通信协议、运动机制以及围绕Pogobot构建的基础设施。
🔬 方法详解
问题定义:现有群体机器人平台通常存在成本高昂、功能单一、扩展性差等问题,限制了群体机器人和活性物质领域的研究进展。研究人员需要一种低成本、高性能、易于使用的机器人平台,以支持大规模实验和复杂算法的开发与验证。
核心思路:Pogobot的核心思路是构建一个开源、模块化、低成本的机器人平台,该平台集成了多种传感器和通信方式,并提供全面的API和可扩展的架构,从而降低研究门槛,促进群体机器人和活性物质领域的研究。
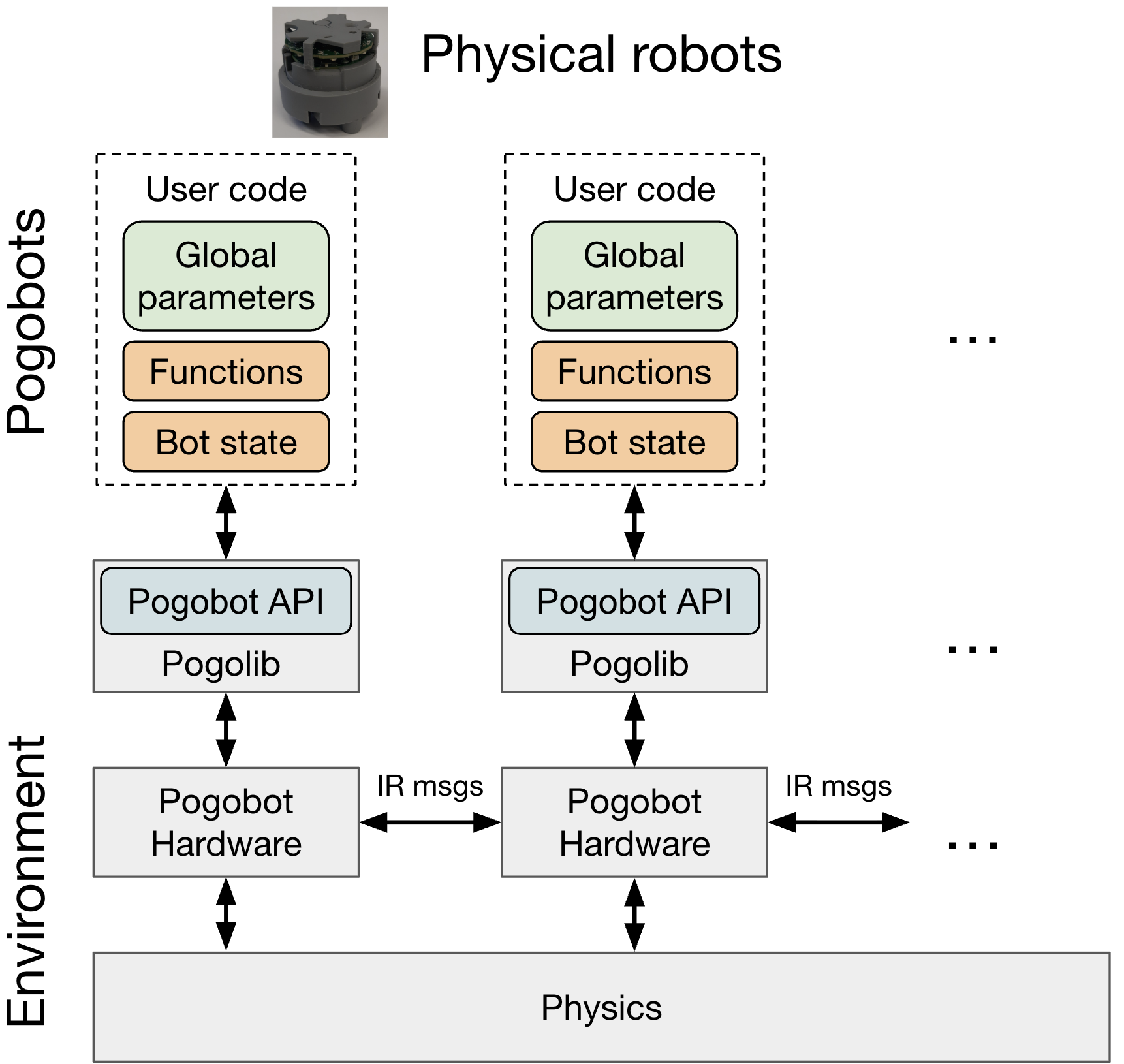
技术框架:Pogobot平台主要包括以下几个模块:1) 硬件模块:包括基于振动或轮式的运动机构、红外通信模块、传感器阵列(如距离传感器、光传感器等)和控制电路;2) 软件模块:包括机器人操作系统(ROS)接口、API和开发工具包,方便用户进行算法开发和控制;3) 基础设施:包括充电站、通信基站等,为大规模实验提供支持。
关键创新:Pogobot的关键创新在于其低成本、高性能和易用性。相比于其他商业化的群体机器人平台,Pogobot的成本大幅降低,使得大规模实验成为可能。同时,Pogobot集成了多种传感器和通信方式,并提供全面的API和可扩展的架构,方便用户进行算法开发和控制。
关键设计:Pogobot的关键设计包括:1) 模块化设计:方便用户根据需求选择和更换不同的模块;2) 红外通信:实现机器人之间的快速定向通信;3) 振动或轮式运动:提供不同的运动方式,适应不同的实验场景;4) ROS接口:方便用户使用ROS进行算法开发和控制。
🖼️ 关键图片

📊 实验亮点
Pogobot平台已在多所大学中被日常使用,用于研究自组织系统、可编程活性物质、离散反应-扩散-对流系统以及社会学习和进化的计算模型。超过200个Pogobot的部署验证了该平台的可扩展性和可靠性。此外,Pogobot的低成本(约250欧元/台)使其成为现有商业化平台的一个经济实惠的替代方案。
🎯 应用场景
Pogobot平台可广泛应用于群体机器人、活性物质、自组织系统、社会学习和进化等领域的研究。例如,可以利用Pogobot研究群体觅食、群体决策、群体运动等行为,也可以将其应用于环境监测、搜索救援、智能交通等实际场景。未来,Pogobot有望成为群体机器人和活性物质领域的重要研究工具。
📄 摘要(原文)
This paper describes the Pogobot, an open-source platform specifically designed for research at the interface of swarm robotics and active matter. Pogobot features vibration-based or wheel-based locomotion, fast infrared communication, and an array of sensors in a cost-effective package (approx. 250euros/unit). The platform's modular design, comprehensive API, and extensible architecture facilitate the implementation of swarm intelligence algorithms and collective motion. Pogobots offer an accessible alternative to existing platforms while providing advanced capabilities including directional communication between units and fast locomotion, all with a compact form factor. More than 200 Pogobots are already being used on a daily basis in several Universities to study self-organizing systems, programmable active matter, discrete reaction-diffusion-advection systems and computational models of social learning and evolution. This paper details the hardware and software architecture, communication protocols, locomotion mechanisms, and the infrastructure built around the Pogobots.