SafeFlow: Safe Robot Motion Planning with Flow Matching via Control Barrier Functions
作者: Xiaobing Dai, Zewen Yang, Dian Yu, Fangzhou Liu, Hamid Sadeghian, Sami Haddadin, Sandra Hirche
分类: cs.RO, eess.SY
发布日期: 2025-04-11 (更新: 2025-11-12)
💡 一句话要点
SafeFlow:基于流匹配和控制屏障函数的安全机器人运动规划
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人运动规划 流匹配 控制屏障函数 安全性 轨迹优化
📋 核心要点
- 现有基于流匹配的运动规划方法缺乏在部署时保证安全性的机制,尤其是在面对新环境和约束时。
- SafeFlow 提出了一种结合流匹配和控制屏障函数的运动规划框架,通过流匹配屏障函数(FMBF)确保轨迹安全性。
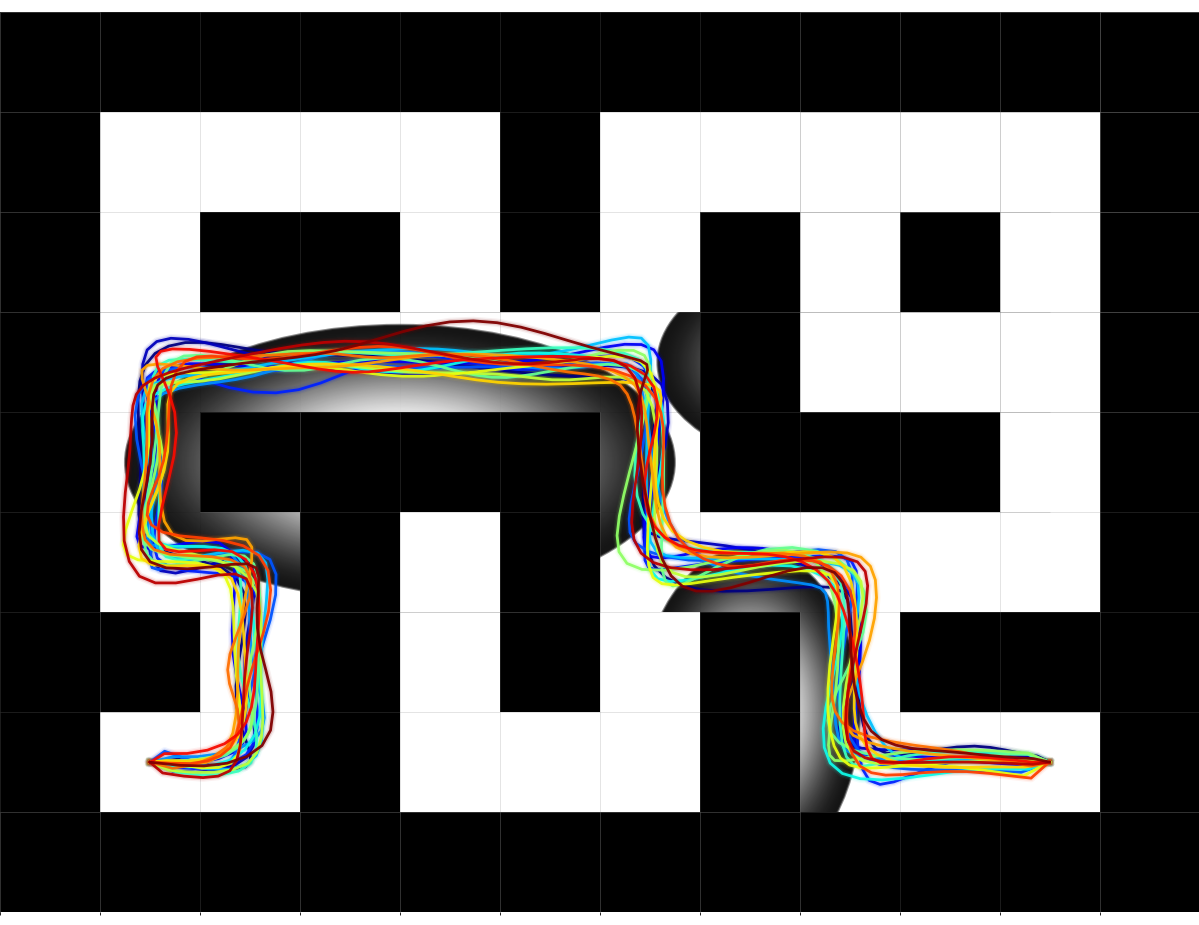
- SafeFlow 在平面导航和7自由度操作等任务中表现出卓越的安全性和规划性能,无需重新训练即可实时保证安全。
📝 摘要(中文)
近年来,生成模型在机器人运动规划中取得了显著进展,特别是基于扩散模型和流匹配(FM)的模型,它们能够捕捉复杂的多模态轨迹分布。然而,这些方法通常是离线训练的,并且在面对具有约束的新环境时仍然存在局限性,通常缺乏在部署期间确保安全性的明确机制。本文提出了一种安全流匹配(SafeFlow)运动规划框架,用于生成具有安全保证的轨迹,该框架将流匹配与安全保证相结合。SafeFlow利用我们提出的流匹配屏障函数(FMBF)来确保规划的轨迹在整个规划范围内保持在安全区域内。至关重要的是,我们的方法能够在测试时进行免训练的实时安全执行,从而无需重新训练。我们在各种任务中评估了SafeFlow,包括平面机器人导航和7自由度操作,证明了与最先进的生成规划器相比,具有卓越的安全性和规划性能。全面的资源可在项目网站上找到:https://safeflowmatching.github.io。
🔬 方法详解
问题定义:论文旨在解决机器人运动规划中,现有基于流匹配的生成模型在面对新环境和约束时,难以保证轨迹安全性的问题。这些方法通常离线训练,缺乏在线安全保障机制,限制了其在实际场景中的应用。
核心思路:论文的核心思路是将流匹配(Flow Matching)与控制屏障函数(Control Barrier Functions, CBF)相结合,提出流匹配屏障函数(Flow Matching Barrier Functions, FMBF)。通过FMBF,可以在训练阶段或测试阶段对轨迹进行约束,确保其始终位于安全区域内。这种方法无需重新训练即可实现实时安全保障。
技术框架:SafeFlow框架主要包含以下几个部分:1) 基于流匹配的轨迹生成器,用于生成初始轨迹;2) 流匹配屏障函数(FMBF),用于定义安全区域和约束;3) 优化器,用于调整轨迹,使其满足FMBF约束,从而保证安全性。整个流程是在给定起始点和目标点的情况下,首先通过流匹配生成初始轨迹,然后利用FMBF和优化器对轨迹进行修正,最终得到安全可行的轨迹。
关键创新:该论文的关键创新在于提出了流匹配屏障函数(FMBF)。与传统的控制屏障函数不同,FMBF直接作用于流匹配模型的向量场,从而可以在轨迹生成过程中直接嵌入安全约束。这种方法避免了在生成轨迹后再进行修正可能导致的性能损失,并且能够实现训练无关的实时安全保障。
关键设计:FMBF的设计需要考虑如何将安全约束转化为流匹配模型的损失函数。具体而言,FMBF定义了一个安全区域,并设计了一个损失函数,当轨迹接近安全区域边界时,该损失函数会产生一个梯度,引导轨迹远离边界。此外,优化器的选择也至关重要,需要选择能够有效处理约束优化问题的优化器,例如序列二次规划(SQP)等。论文中可能还涉及一些超参数的设置,例如安全区域的边界距离、损失函数的权重等,这些参数会影响最终的安全性和轨迹质量。
🖼️ 关键图片


📊 实验亮点
SafeFlow在平面机器人导航和7自由度机械臂操作等任务中进行了评估,实验结果表明,SafeFlow能够显著提高轨迹的安全性,同时保持良好的规划性能。与现有的生成式规划器相比,SafeFlow能够在保证安全性的前提下,生成更加自然流畅的轨迹,并且无需重新训练即可适应新的环境和约束。
🎯 应用场景
SafeFlow在机器人运动规划领域具有广泛的应用前景,尤其适用于需要高安全性的场景,如人机协作、自动驾驶、医疗机器人等。该方法能够确保机器人在复杂环境中安全可靠地完成任务,降低事故风险,提高生产效率。未来,SafeFlow有望应用于更多类型的机器人和更复杂的环境,推动机器人技术的进一步发展。
📄 摘要(原文)
Recent advances in generative modeling have led to promising results in robot motion planning, particularly through diffusion and flow matching (FM)-based models that capture complex, multimodal trajectory distributions. However, these methods are typically trained offline and remain limited when faced with new environments with constraints, often lacking explicit mechanisms to ensure safety during deployment. In this work, safe flow matching (SafeFlow), a motion planning framework, is proposed for trajectory generation that integrates flow matching with safety guarantees. SafeFlow leverages our proposed flow matching barrier functions (FMBF) to ensure the planned trajectories remain within safe regions across the entire planning horizon. Crucially, our approach enables training-free, real-time safety enforcement at test time, eliminating the need for retraining. We evaluate SafeFlow on a diverse set of tasks, including planar robot navigation and 7-DoF manipulation, demonstrating superior safety and planning performance compared to state-of-the-art generative planners. Comprehensive resources are available on the project website: https://safeflowmatching.github.io.