Experimental Evaluation of Precise Placement of the Hollow Object with Asymmetric Pivot Manipulation
作者: Jinseong Park, Jeong-Jung Kim, Doo-Yeol Koh
分类: cs.RO
发布日期: 2025-04-08
💡 一句话要点
提出非对称枢轴操作,实现机器人对中空物体的精确孔抓取
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人抓取 孔抓取 非对称枢轴操作 中空物体 自动化装配
📋 核心要点
- 现有方法在抓取中空物体时,难以实现精确放置和后续操作,尤其是在需要将物体插入狭窄空间时。
- 论文提出非对称枢轴操作,通过机械臂控制夹爪的枢轴运动,实现对中空物体的孔抓取,提高抓取精度。
- 实验验证了该方法对不同尺寸和孔形状的中空物体的有效性,并展示了在对齐和进给任务中的优势。
📝 摘要(中文)
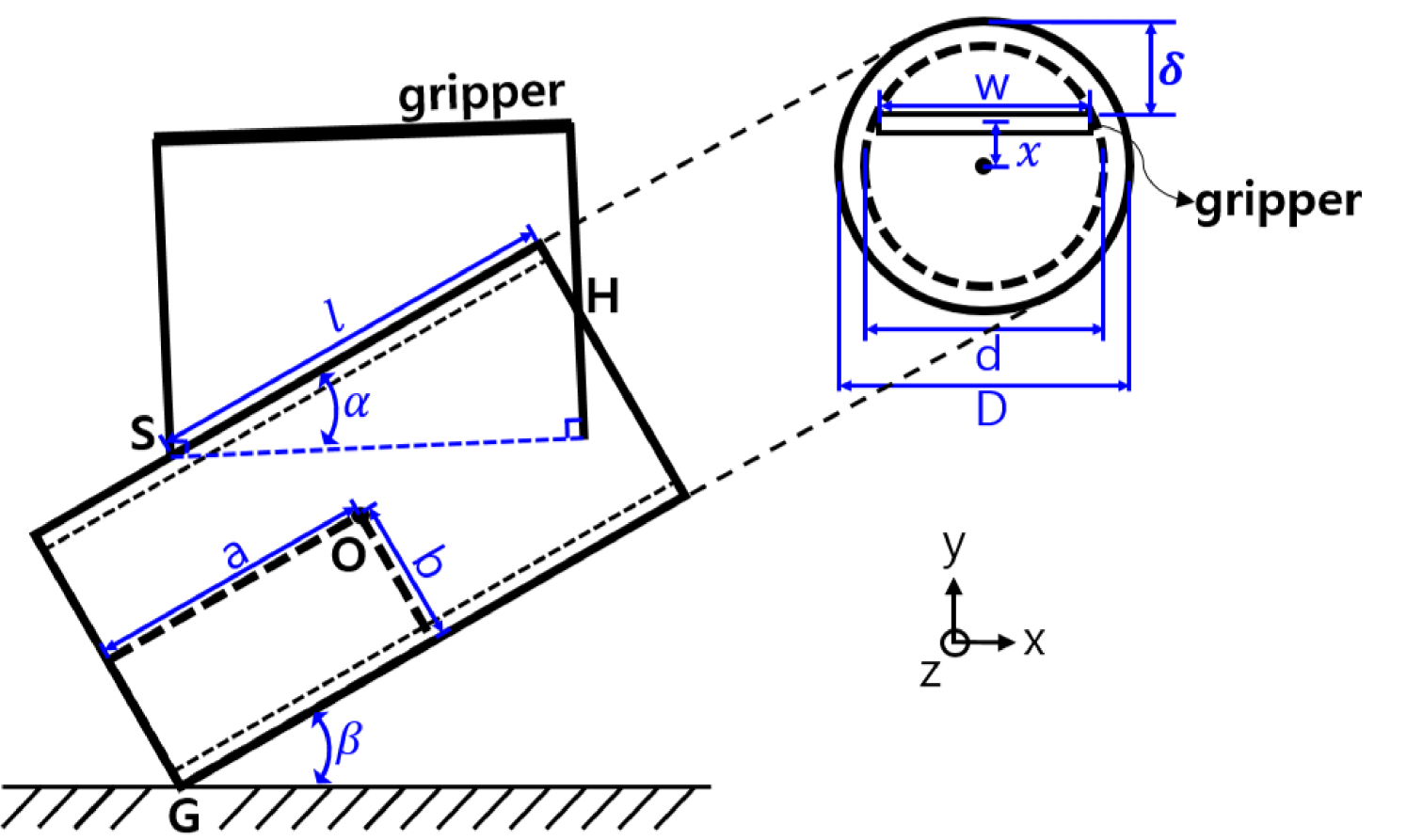
本文提出了一种非对称枢轴操作方法,用于拾取刚性中空物体以实现孔抓取。通过位置控制的机械臂执行枢轴运动,使夹爪能够有效地抓取水平放置的中空物体,其中一个夹爪手指位于物体的孔内,而另一个手指沿长度方向接触其外表面。孔抓取被人类广泛用于操作中空物体,从而便于精确放置并实现高效的后续操作,例如将物体紧密地装入托盘中,或在制造过程中将其准确地插入狭窄的机器插槽中。用于孔抓取的非对称枢轴操作适用于各种尺寸和孔形状的中空物体,包括瓶子、杯子和管道。我们研究了满足成功抓取配置的力平衡条件的可变参数。我们的方法可以使用直接安装在机器人手臂上的商用平行爪夹具来实现,而无需修改。实验验证证实,使用我们提出的非对称枢轴操作可以实现对各种中空物体的孔抓取,从而证明了高成功率。在试验台上对齐和进给中空圆柱形物体这两个用例进行了实验演示,以清楚地展示孔抓取方法的优势。
🔬 方法详解
问题定义:论文旨在解决机器人如何精确抓取中空物体,特别是实现“孔抓取”的问题。传统的抓取方法可能难以保证中空物体放置的精度,尤其是在需要将物体插入狭窄空间或进行紧密堆叠时。现有方法缺乏一种通用的、易于实现的策略来稳定且精确地抓取具有孔洞的中空物体。
核心思路:核心思路是利用非对称枢轴操作,通过控制机械臂带动夹爪进行旋转运动,使得一个夹爪手指进入物体的孔洞内部,另一个夹爪手指则接触物体的外表面。这种非对称的抓取方式能够提供更强的抓取稳定性和更高的放置精度,模拟了人类手动抓取中空物体的常见方式。
技术框架:该方法主要包含以下几个阶段:1) 物体识别与定位:确定中空物体的位置和孔洞的位置。2) 枢轴运动规划:根据物体和孔洞的几何特征,规划机械臂的枢轴运动轨迹。3) 夹爪控制:控制夹爪的开合,实现孔抓取。4) 放置与后续操作:将物体放置到目标位置,并执行后续的操作,如对齐或进给。
关键创新:关键创新在于提出了非对称枢轴操作的概念,并将其应用于机器人抓取中空物体。与传统的平行抓取或包围抓取相比,孔抓取能够提供更高的抓取精度和稳定性,尤其是在处理具有复杂形状或需要精确放置的物体时。该方法无需对现有机器人硬件进行大幅修改,易于部署和应用。
关键设计:论文研究了影响抓取成功的力平衡条件,并分析了相关的可变参数。这些参数可能包括枢轴运动的速度、夹爪的抓取力、以及物体和孔洞的几何尺寸。论文可能还涉及了对机械臂运动轨迹的优化,以确保抓取过程的稳定性和效率。具体的损失函数和网络结构(如果使用)未知。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法能够成功实现对多种中空物体的孔抓取,并具有较高的成功率。论文通过两个用例,即对齐和进给中空圆柱形物体,展示了孔抓取方法的优势。具体的性能数据(如成功率、抓取时间、放置精度等)和对比基线未知,但实验结果表明该方法在实际应用中具有良好的可行性和有效性。
🎯 应用场景
该研究成果可广泛应用于自动化装配、物流分拣、医疗器械操作等领域。例如,在自动化装配线上,机器人可以利用该方法精确抓取并安装各种中空零件,提高生产效率和产品质量。在医疗领域,机器人可以利用该方法安全地操作试管、注射器等医疗器械,降低人为操作的风险。此外,该方法还可用于食品包装、仓储管理等场景。
📄 摘要(原文)
In this paper, we present asymmetric pivot manipulation for picking up rigid hollow objects to achieve a hole grasp. The pivot motion, executed by a position-controlled robotic arm, enables the gripper to effectively grasp hollow objects placed horizontally such that one gripper finger is positioned inside the object's hole, while the other contacts its outer surface along the length. Hole grasp is widely employed by humans to manipulate hollow objects, facilitating precise placement and enabling efficient subsequent operations, such as tightly packing objects into trays or accurately inserting them into narrow machine slots in manufacturing processes. Asymmetric pivoting for hole grasping is applicable to hollow objects of various sizes and hole shapes, including bottles, cups, and ducts. We investigate the variable parameters that satisfy the force balance conditions for successful grasping configurations. Our method can be implemented using a commercially available parallel-jaw gripper installed directly on a robot arm without modification. Experimental verification confirmed that hole grasp can be achieved using our proposed asymmetric pivot manipulation for various hollow objects, demonstrating a high success rate. Two use cases, namely aligning and feeding hollow cylindrical objects, were experimentally demonstrated on the testbed to clearly showcase the advantages of the hole grasp approach.