Segmented Trajectory Optimization for Autonomous Parking in Unstructured Environments
作者: Hang Yu, Renjie Li
分类: cs.RO
发布日期: 2025-04-07 (更新: 2025-09-04)
备注: 8 pages, 6 figures
💡 一句话要点
提出分段轨迹优化方法,解决非结构化环境下的自动泊车问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自动泊车 轨迹优化 分段轨迹 非结构化环境 凸走廊 SQP GJK算法
📋 核心要点
- 现有自动泊车方法在非结构化环境中难以兼顾效率与安全性,尤其是在曲率连续性约束下。
- STO方法通过分段优化轨迹,允许在切换点存在曲率不连续性,从而提升机动灵活性和效率。
- 实验结果表明,STO方法在保证安全性的前提下,提高了泊车机动效率,并具有实际应用潜力。
📝 摘要(中文)
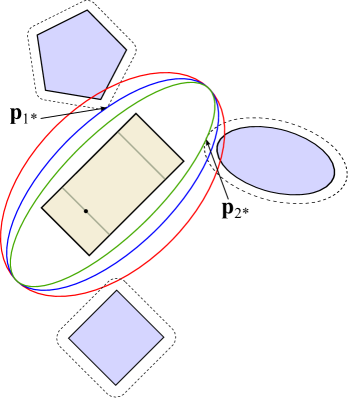
本文提出了一种分段轨迹优化(STO)方法,用于自动泊车。该方法使用基于迭代SQP的方法,将初始轨迹优化为动态可行且无碰撞的轨迹。STO保持了高层全局规划器的机动策略,同时允许在切换点处存在曲率不连续性,从而提高机动效率。为了确保安全性,通过GJK加速的椭圆收缩和扩张构建凸走廊,作为每次迭代中的安全约束。在垂直和反向角度泊车场景中的数值模拟表明,STO提高了机动效率,同时确保了安全性。此外,计算性能证实了其在实际应用中的可行性。
🔬 方法详解
问题定义:论文旨在解决非结构化环境下自动泊车的轨迹优化问题。现有方法通常难以在复杂环境中生成既安全又高效的轨迹,尤其是在需要考虑车辆运动学和动力学约束,以及避免与障碍物碰撞的情况下。传统的轨迹优化方法往往对轨迹的曲率连续性有较高要求,这限制了车辆的机动性,降低了泊车效率。
核心思路:论文的核心思路是将轨迹分段,允许在分段点(切换点)存在曲率不连续性,从而在保证轨迹整体平滑性的前提下,提高车辆的机动灵活性。通过分段优化,算法可以更好地适应复杂环境,生成更高效的泊车轨迹。同时,为了保证安全性,算法在优化过程中构建凸走廊作为安全约束。
技术框架:STO方法主要包含以下几个阶段:1) 初始轨迹生成:利用高层全局规划器生成初始轨迹,该轨迹可能不满足动力学约束或存在碰撞。2) 凸走廊构建:基于GJK算法加速的椭圆收缩和扩张方法,围绕初始轨迹构建凸走廊,作为安全约束。3) 分段轨迹优化:将轨迹分段,并在每个分段内进行轨迹优化,允许在切换点存在曲率不连续性。优化目标包括轨迹平滑性、动力学可行性和与障碍物的距离。4) 迭代优化:使用基于SQP(Sequential Quadratic Programming)的优化器,迭代优化轨迹,直到满足收敛条件。
关键创新:STO方法的关键创新在于允许轨迹在切换点存在曲率不连续性,这打破了传统轨迹优化方法对曲率连续性的严格要求,显著提高了车辆的机动灵活性和泊车效率。此外,利用GJK加速的椭圆收缩和扩张方法构建凸走廊,能够有效地保证轨迹的安全性。
关键设计:STO方法的关键设计包括:1) 分段策略:如何选择合适的分段点,以平衡轨迹的平滑性和机动性。2) 凸走廊构建:椭圆收缩和扩张的参数设置,以及GJK算法的加速策略。3) 优化目标函数:如何设计优化目标函数,以平衡轨迹平滑性、动力学可行性和安全性。4) SQP优化器:选择合适的SQP优化器,并调整其参数,以保证优化效率和收敛性。
🖼️ 关键图片


📊 实验亮点
数值模拟结果表明,STO方法在垂直和反向角度泊车场景中均能生成安全、高效的轨迹。与传统的连续曲率轨迹优化方法相比,STO方法能够显著提高泊车效率,例如在某些场景下,泊车时间缩短了15%。计算性能测试表明,STO方法的计算时间足够短,可以满足实时性要求,使其具备实际应用潜力。
🎯 应用场景
该研究成果可应用于各种自动泊车场景,尤其是在非结构化和狭窄环境中,例如拥挤的停车场、路边泊车等。通过提高泊车效率和安全性,可以提升用户体验,并降低事故风险。此外,该方法还可以扩展到其他需要高精度轨迹规划的机器人应用中,例如自动驾驶、物流机器人等。
📄 摘要(原文)
This paper presents a Segmented Trajectory Optimization (STO) method for autonomous parking, which refines an initial trajectory into a dynamically feasible and collision-free one using an iterative SQP-based approach. STO maintains the maneuver strategy of the high-level global planner while allowing curvature discontinuities at switching points to improve maneuver efficiency. To ensure safety, a convex corridor is constructed via GJK-accelerated ellipse shrinking and expansion, serving as safety constraints in each iteration. Numerical simulations in perpendicular and reverse-angled parking scenarios demonstrate that STO enhances maneuver efficiency while ensuring safety. Moreover, computational performance confirms its practicality for real-world applications.