Deliberate Planning of 3D Bin Packing on Packing Configuration Trees
作者: Hang Zhao, Juzhan Xu, Kexiong Yu, Ruizhen Hu, Chenyang Zhu, Bo Du, Kai Xu
分类: cs.RO, cs.LG
发布日期: 2025-04-06 (更新: 2025-09-04)
备注: International Journal of Robotics Research
💡 一句话要点
提出基于Packing Configuration Tree的3D装箱规划方法,提升工业自动化应用性。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 3D装箱问题 深度强化学习 装箱配置树 工业自动化 机器人 空间规划 智能仓储
📋 核心要点
- 现有3D装箱方法在空间离散化分辨率和处理复杂约束方面存在局限,难以满足工业应用需求。
- 论文提出基于装箱配置树(PCT)的分层表示方法,结合深度强化学习和树状规划,实现高效装箱。
- 实验表明,该方法优于现有基线,能灵活处理各种约束,并在大规模问题和不同变体中表现出色。
📝 摘要(中文)
本文旨在提升在线3D装箱问题(3D-BPP)在工业自动化中的实际应用性。现有方法通常受限于空间离散化的分辨率,且难以处理复杂的实际约束。为此,我们提出了一种基于新型分层表示——装箱配置树(PCT)的学习方法。PCT完整地描述了装箱的状态和动作空间,支持基于深度强化学习(DRL)的装箱策略学习。装箱动作空间的大小与叶节点数量成正比,使得DRL模型易于训练,并在连续解空间中表现良好。我们进一步探索了PCT作为树状规划器在解决具有工业意义的装箱问题中的潜力,包括大规模装箱和不同BPP变体。提出了一种递归装箱方法,将大规模装箱分解为较小的子树,并采用空间集成机制将局部解集成到全局。对于具有额外决策变量的不同BPP变体,如前瞻、缓冲和离线装箱,我们提出了一个统一的规划框架,能够开箱即用地解决问题。大量评估表明,我们的方法优于现有的在线BPP基线,并且能够灵活地结合各种实际约束。该规划过程在大规模问题和不同的问题变体中表现出色。我们开发了一种用于工业仓储的真实装箱机器人,并仔细设计以考虑受约束的放置和运输稳定性。我们的装箱机器人在无保护托盘上可靠高效地运行,每个箱子耗时10秒。对于相对较大的箱子,平均每个托盘装载19个箱子,空间利用率为57.4%。
🔬 方法详解
问题定义:论文旨在解决在线3D装箱问题(3D-BPP),该问题在工业自动化中具有广泛应用。现有方法的主要痛点在于:一是空间离散化分辨率有限,导致装箱效率不高;二是难以处理实际应用中存在的各种复杂约束,例如物品的稳定性、放置方向限制等。
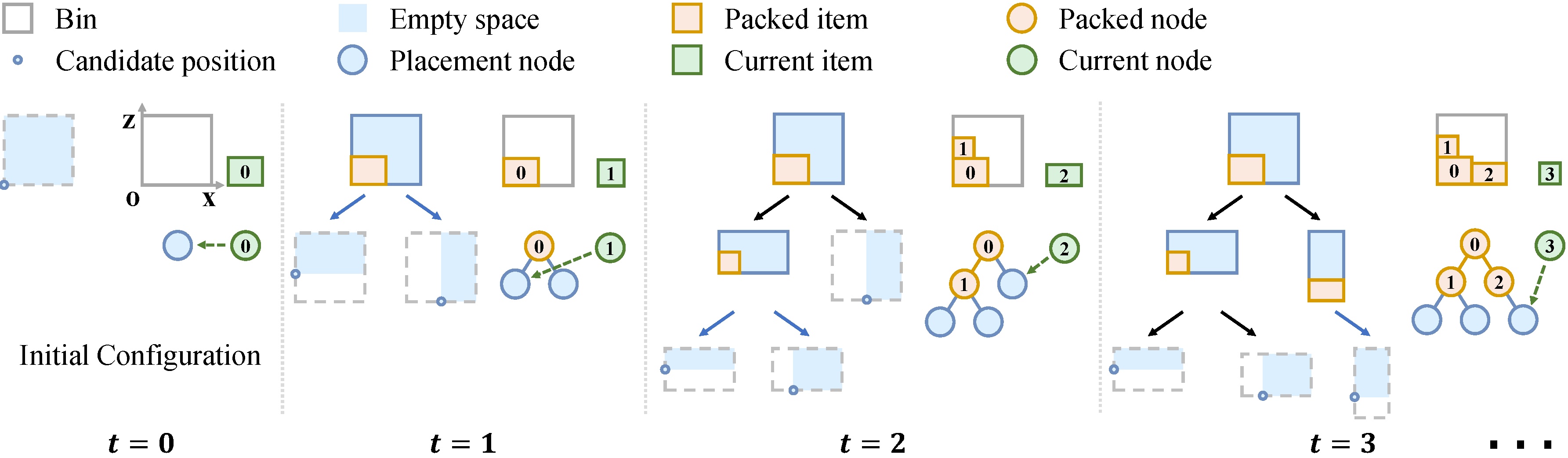
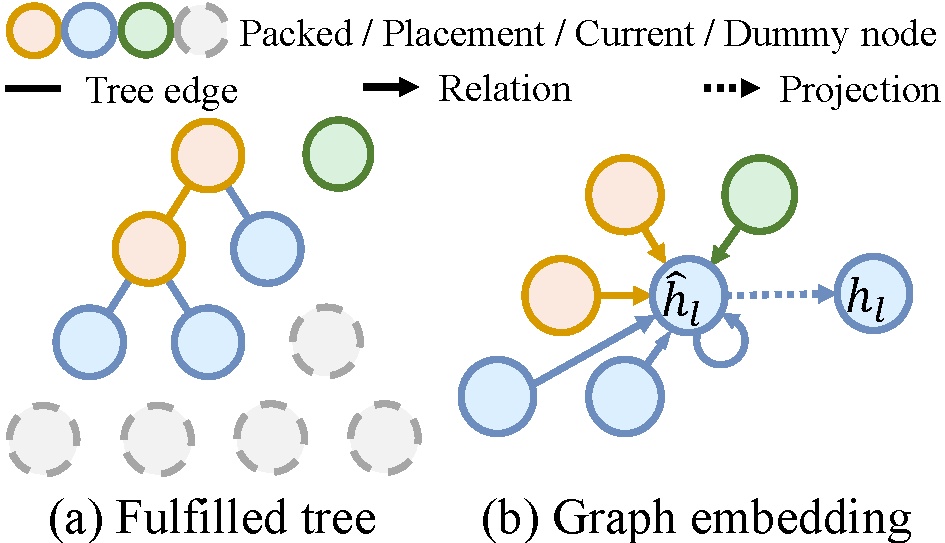
核心思路:论文的核心思路是利用一种新型的分层表示方法——装箱配置树(Packing Configuration Tree, PCT)来描述装箱的状态和动作空间。PCT能够完整地表示装箱过程中的各种状态和动作,并且可以有效地减小动作空间的大小,从而使得深度强化学习模型更容易训练。此外,PCT还可以作为树状规划器,用于解决大规模装箱问题和各种BPP变体。
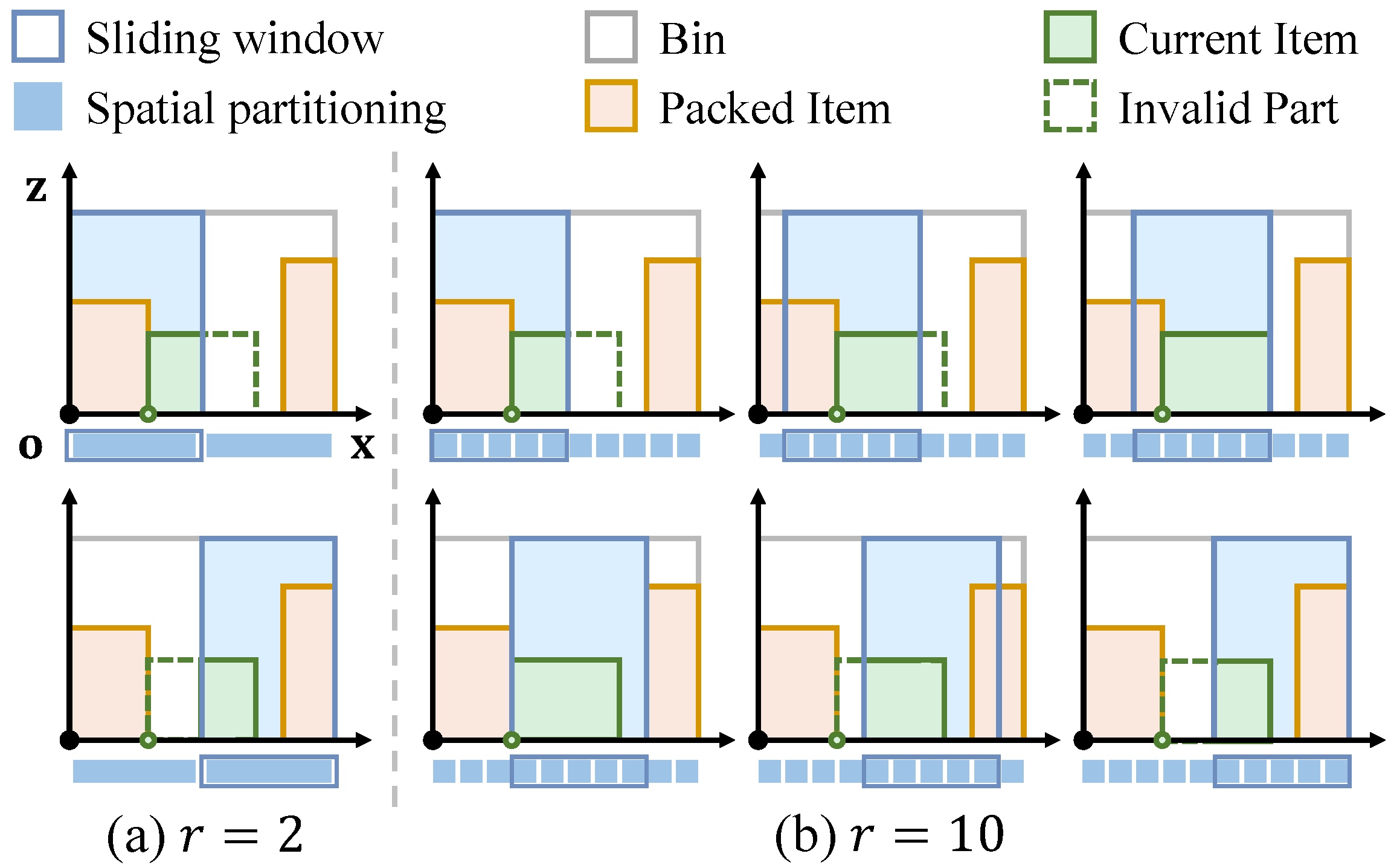
技术框架:整体框架包含以下几个主要模块:1) PCT构建模块:负责根据当前装箱状态构建PCT,包括确定可行的放置位置和方向等。2) 策略学习模块:利用深度强化学习算法,学习在PCT上进行装箱决策的策略。3) 递归装箱模块:将大规模装箱问题分解为多个子树,分别进行求解,然后通过空间集成机制将局部解合并为全局解。4) 统一规划框架:针对不同的BPP变体,设计统一的规划框架,使其能够灵活地处理各种约束和目标。
关键创新:论文最重要的技术创新点在于提出了装箱配置树(PCT)这种新型的分层表示方法。与现有方法相比,PCT能够更完整、更有效地描述装箱的状态和动作空间,并且可以显著减小动作空间的大小,从而使得深度强化学习模型更容易训练和优化。此外,PCT还可以作为树状规划器,用于解决大规模装箱问题和各种BPP变体。
关键设计:论文的关键设计包括:1) PCT的构建方式:PCT的每个节点代表一个装箱状态,每个分支代表一个可能的装箱动作。PCT的构建需要考虑物品的尺寸、形状、稳定性等因素。2) 深度强化学习算法的选择:论文选择了合适的深度强化学习算法(具体算法未知)来训练装箱策略。3) 递归装箱策略:论文设计了一种递归装箱策略,将大规模装箱问题分解为多个子问题,并采用空间集成机制将局部解合并为全局解。4) 统一规划框架:论文设计了一个统一的规划框架,使其能够灵活地处理各种BPP变体,例如前瞻、缓冲和离线装箱。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法在在线3D装箱问题上优于现有基线方法。在实际的装箱机器人应用中,对于相对较大的箱子,平均每个托盘可以装载19个箱子,空间利用率达到57.4%,并且每个箱子的装箱时间仅为10秒。这些数据表明该方法具有很高的实用价值。
🎯 应用场景
该研究成果可广泛应用于工业自动化领域,例如智能仓储、物流配送、生产制造等。通过优化装箱策略,可以提高空间利用率,降低运输成本,提升物流效率。未来,该技术有望应用于更复杂的装箱场景,例如异形物品装箱、多目标优化装箱等。
📄 摘要(原文)
Online 3D Bin Packing Problem (3D-BPP) has widespread applications in industrial automation. Existing methods usually solve the problem with limited resolution of spatial discretization, and/or cannot deal with complex practical constraints well. We propose to enhance the practical applicability of online 3D-BPP via learning on a novel hierarchical representation, packing configuration tree (PCT). PCT is a full-fledged description of the state and action space of bin packing which can support packing policy learning based on deep reinforcement learning (DRL). The size of the packing action space is proportional to the number of leaf nodes, making the DRL model easy to train and well-performing even with continuous solution space. We further discover the potential of PCT as tree-based planners in deliberately solving packing problems of industrial significance, including large-scale packing and different variations of BPP setting. A recursive packing method is proposed to decompose large-scale packing into smaller sub-trees while a spatial ensemble mechanism integrates local solutions into global. For different BPP variations with additional decision variables, such as lookahead, buffering, and offline packing, we propose a unified planning framework enabling out-of-the-box problem solving. Extensive evaluations demonstrate that our method outperforms existing online BPP baselines and is versatile in incorporating various practical constraints. The planning process excels across large-scale problems and diverse problem variations. We develop a real-world packing robot for industrial warehousing, with careful designs accounting for constrained placement and transportation stability. Our packing robot operates reliably and efficiently on unprotected pallets at 10 seconds per box. It achieves averagely 19 boxes per pallet with 57.4% space utilization for relatively large-size boxes.