AuDeRe: Automated Strategy Decision and Realization in Robot Planning and Control via LLMs
作者: Yue Meng, Fei Chen, Yongchao Chen, Chuchu Fan
分类: cs.RO
发布日期: 2025-04-03 (更新: 2025-09-30)
备注: 8 pages, 14 figures, submitted to the 2026 American Control Conference
💡 一句话要点
AuDeRe:基于LLM的机器人规划与控制策略自动决策与实现框架
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 大型语言模型 机器人规划 机器人控制 策略选择 自主机器人
📋 核心要点
- 现有基于LLM的机器人应用通常直接预测路径点或在固定框架内使用LLM,缺乏灵活性,难以针对不同任务选择最优方案。
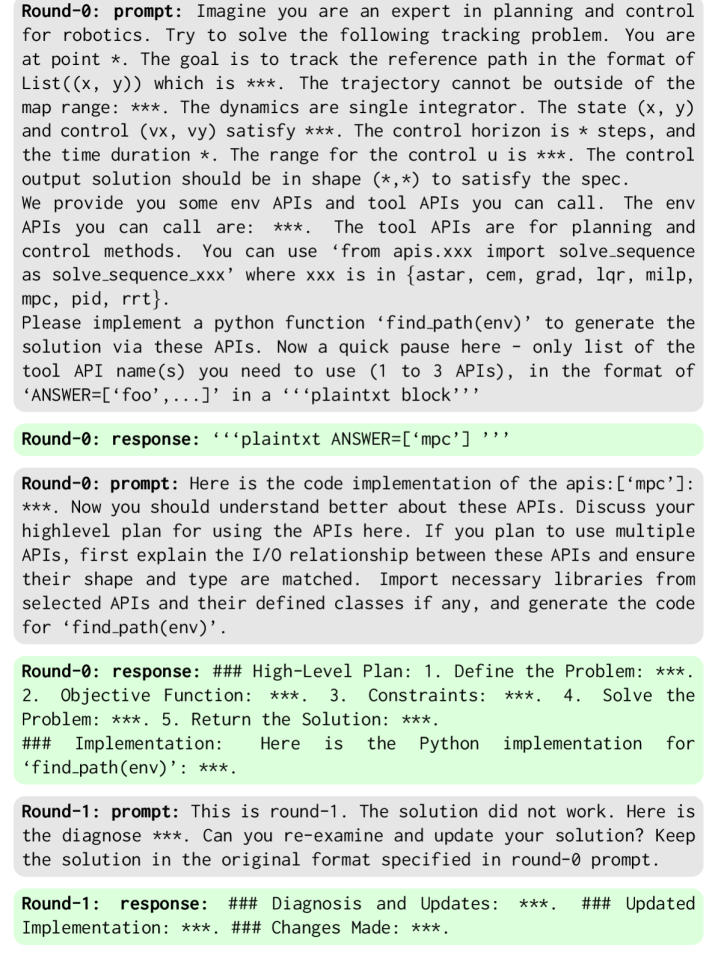
- AuDeRe框架利用LLM根据任务描述、环境约束和系统动力学,自动选择合适的规划和控制策略,并通过API调用执行。
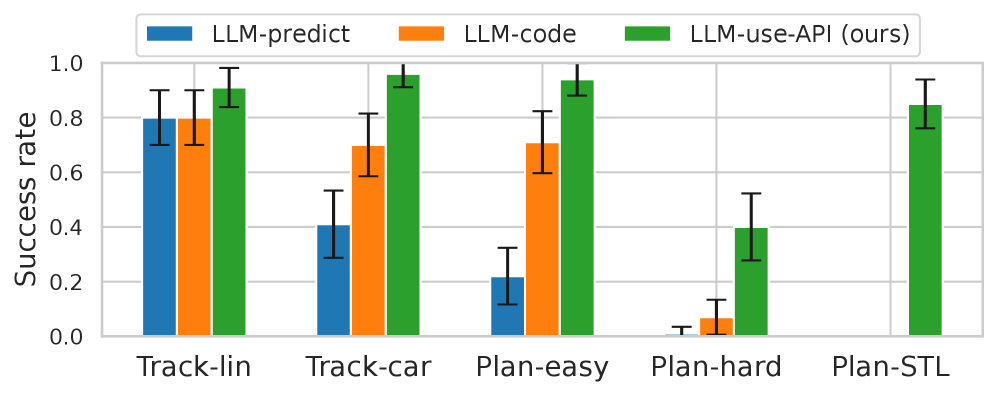
- 实验结果表明,该方法显著提升了机器人的自主性,减少了人工干预,并在不同复杂度的任务中表现出良好的通用性。
📝 摘要(中文)
本文提出了一种利用大型语言模型(LLM)自动选择机器人规划和控制策略的框架。该框架基于任务描述、环境约束和系统动力学,调用可用的规划和控制API来执行策略。通过迭代的、基于LLM的推理和性能反馈,框架能够不断优化算法选择。实验结果表明,利用LLM从自然语言描述中确定规划和控制策略,能够显著提高机器人的自主性,并减少手动调整和专家知识的需求。此外,该框架在不同任务中具有通用性,并且明显优于直接使用LLM生成轨迹、控制序列或代码的基线方法。
🔬 方法详解
问题定义:现有基于LLM的机器人控制方法,要么直接生成轨迹点,要么将LLM嵌入到预定义的工具链中,缺乏根据任务自适应选择规划和控制策略的能力。这限制了机器人处理复杂任务的灵活性和效率,需要大量的人工调参和专家知识。
核心思路:AuDeRe的核心在于利用LLM的强大推理能力,将机器人规划和控制问题转化为一个策略选择问题。LLM根据任务描述、环境约束和系统动力学等信息,从预定义的策略库中选择最合适的策略组合,并通过API调用执行。这种方法将LLM从直接控制执行器中解放出来,使其专注于更高层次的决策。
技术框架:AuDeRe框架包含以下几个主要模块:1) 任务理解模块:接收自然语言描述的任务,提取关键信息,如目标、约束等。2) 策略选择模块:利用LLM根据任务信息、环境约束和系统动力学,从预定义的策略库中选择合适的规划和控制策略。3) 策略执行模块:调用相应的规划和控制API执行选定的策略。4) 性能反馈模块:评估策略执行的效果,并将反馈信息传递给LLM,用于迭代优化策略选择。
关键创新:AuDeRe的关键创新在于利用LLM进行策略选择,而不是直接生成轨迹或控制指令。这种方法具有更高的灵活性和通用性,能够更好地适应不同的任务和环境。此外,AuDeRe还采用了迭代的推理和反馈机制,不断优化策略选择,提高性能。
关键设计:策略库的设计至关重要,需要包含各种常用的规划和控制算法,并提供清晰的API接口。LLM的prompt设计也需要精心设计,以确保LLM能够准确理解任务描述,并选择合适的策略。性能反馈模块需要能够准确评估策略执行的效果,并提供有用的反馈信息。
🖼️ 关键图片

📊 实验亮点
实验结果表明,AuDeRe框架在各种复杂度的任务中均优于基线方法。例如,在包含时空约束的复杂规划任务中,AuDeRe能够成功完成任务,而直接使用LLM生成轨迹或控制序列的方法则无法完成。此外,AuDeRe还能够显著减少人工调整和专家知识的需求,降低了机器人应用的开发成本。
🎯 应用场景
该研究成果可应用于各种机器人应用场景,例如:自动驾驶、工业自动化、家庭服务机器人等。通过自动选择合适的规划和控制策略,可以提高机器人的自主性、效率和鲁棒性,降低开发和维护成本。未来,该框架可以进一步扩展到更复杂的任务和环境,并与其他AI技术相结合,实现更高级的机器人智能。
📄 摘要(原文)
Recent advancements in large language models (LLMs) have shown significant promise in various domains, especially robotics. However, most prior LLM-based work in robotic applications either directly predicts waypoints or applies LLMs within fixed tool integration frameworks, offering limited flexibility in exploring and configuring solutions best suited to different tasks. In this work, we propose a framework that leverages LLMs to select appropriate planning and control strategies based on task descriptions, environmental constraints, and system dynamics. These strategies are then executed by calling the available comprehensive planning and control APIs. Our approach employs iterative LLM-based reasoning with performance feedback to refine the algorithm selection. We validate our approach through extensive experiments across tasks of varying complexity, from simple tracking to complex planning scenarios involving spatiotemporal constraints. The results demonstrate that using LLMs to determine planning and control strategies from natural language descriptions significantly enhances robotic autonomy while reducing the need for extensive manual tuning and expert knowledge. Furthermore, our framework maintains generalizability across different tasks and notably outperforms baseline methods that rely on LLMs for direct trajectory, control sequence, or code generation.