The Social Life of Industrial Arms: How Arousal and Attention Shape Human-Robot Interaction
作者: Roy El-Helou, Matthew K. X. J Pan
分类: cs.RO, cs.HC, eess.SY
发布日期: 2025-04-02 (更新: 2025-08-11)
备注: 7 pages, 3 figures, 1 table
💡 一句话要点
通过唤醒度和注意力机制提升工业机械臂的人机交互体验
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人机交互 工业机器人 注意力机制 唤醒度 社交机器人
📋 核心要点
- 现有工业机械臂人机交互不足,缺乏社会性和直观性,难以建立信任。
- 论文提出一种结合凝视注意力引擎和唤醒度调节运动系统的新型控制架构。
- 实验表明,专注的注意力和适度的唤醒度能显著提升用户信任感和社会性评价。
📝 摘要(中文)
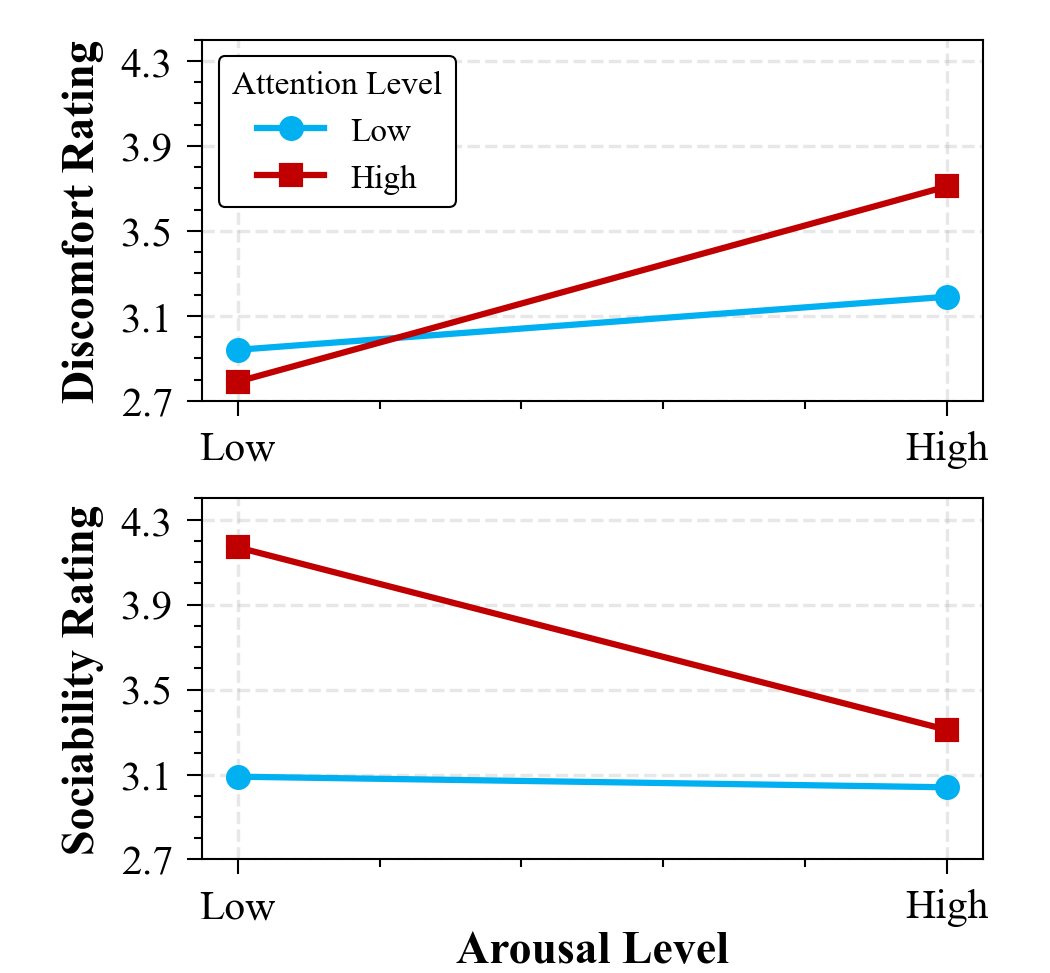
本研究探讨了人类对非拟人化机器人机械臂的感知如何受到两个关键行为维度的影响:唤醒度(定义为机器人的运动能量和表现力)和注意力(定义为机器人选择性地朝向用户并与之互动的能力)。我们引入了一种新颖的控制架构,该架构集成了类似凝视的注意力引擎和唤醒度调节的运动系统,以生成具有社会意义的行为。在一项用户研究中,我们发现表现出高度注意力的机器人(积极地将其注意力导向用户)被认为更温暖、更有能力、更有意图和更像生物。相反,高唤醒度(以快速、广阔和充满活力的运动为特征)会增加不适感和干扰感。重要的是,专注的注意力和适度的唤醒度的结合产生了最高的信任和社会性评分,而过度的唤醒度会降低社会参与度。这些发现为赋予非人形机器人具有表现力、直观的行为提供了设计见解,从而支持更自然的人机交互。
🔬 方法详解
问题定义:现有工业机械臂通常缺乏与人类进行有效社交互动能力,导致用户在使用过程中感到不适或缺乏信任感。主要痛点在于机械臂的运动模式单调、缺乏表达,以及无法有效捕捉和响应人类的意图。
核心思路:论文的核心思路是通过模拟人类的社交行为,赋予机械臂“注意力”和“唤醒度”这两个关键维度。注意力是指机械臂能够选择性地关注用户,并通过类似凝视的行为进行互动;唤醒度则指机械臂运动的能量和表现力,通过控制运动速度和幅度来表达不同的情感状态。通过结合这两个维度,使机械臂的行为更具社会性和可预测性。
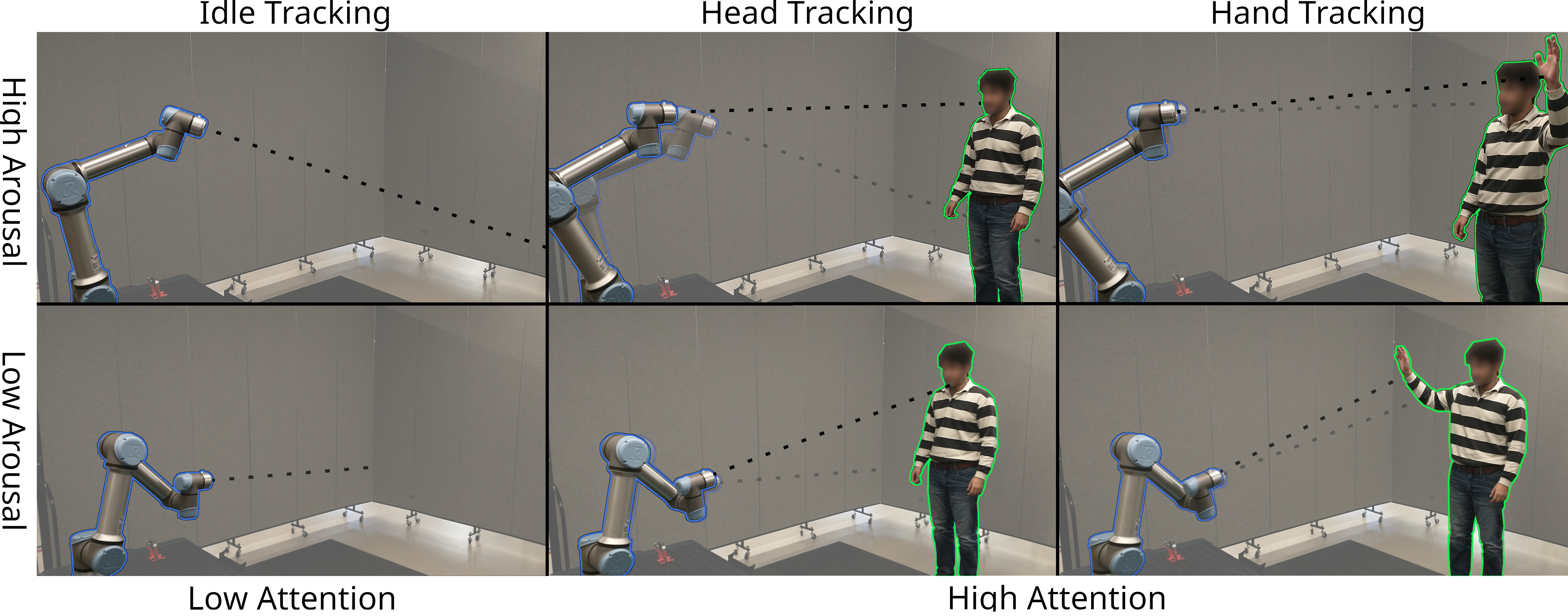
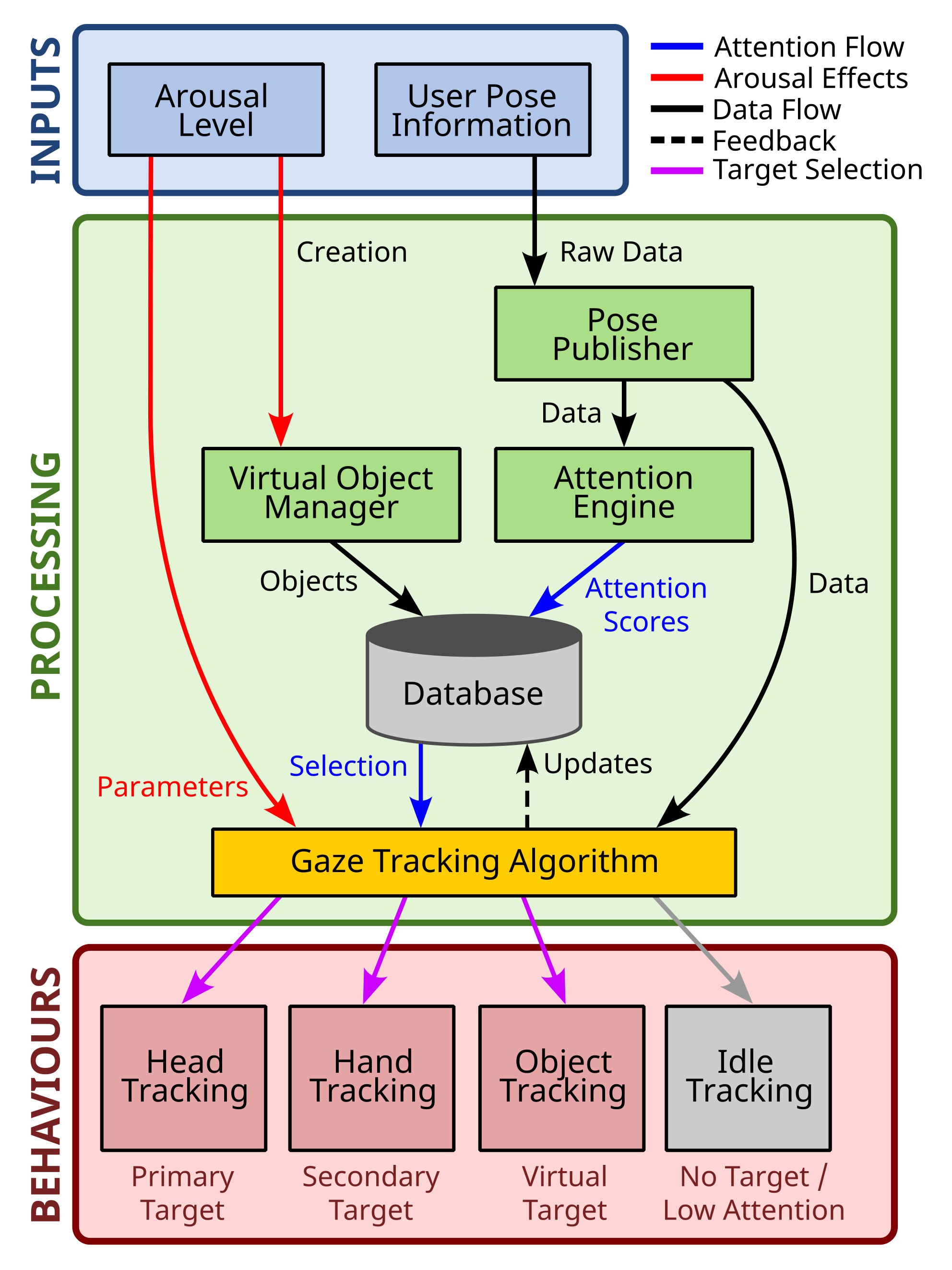
技术框架:该研究提出的控制架构包含两个主要模块:注意力引擎和唤醒度调节的运动系统。注意力引擎负责捕捉用户的位置和姿态,并生成相应的凝视方向,使机械臂能够“注视”用户。唤醒度调节的运动系统则根据预设的唤醒度水平,调整机械臂的运动速度、加速度和幅度,从而控制其运动能量和表现力。这两个模块协同工作,共同生成具有社会意义的行为。
关键创新:该研究的关键创新在于将注意力机制和唤醒度概念引入到工业机械臂的控制中,并设计了一种能够同时控制这两个维度的控制架构。与传统的机械臂控制方法相比,该方法能够更好地模拟人类的社交行为,从而提升人机交互的自然性和有效性。
关键设计:注意力引擎采用基于视觉的跟踪算法,实时捕捉用户的位置和姿态,并根据用户的运动轨迹预测其意图。唤醒度调节的运动系统则采用参数化的运动模型,通过调整运动模型的参数来控制机械臂的运动速度和幅度。研究者通过用户实验,探索了不同注意力水平和唤醒度水平对用户感知的影响,并确定了最佳的参数组合。
🖼️ 关键图片
📊 实验亮点
用户研究表明,高注意力(机器人积极关注用户)显著提升了用户对机器人温暖度、能力、意图和生命力的感知。适度的唤醒度与专注的注意力相结合,能获得最高的信任和社会性评分。过高的唤醒度则会降低社会参与度,表明并非所有“活力”都有助于人机交互。
🎯 应用场景
该研究成果可应用于各种需要人机协作的工业场景,例如自动化装配、医疗康复、以及辅助教学等。通过赋予机器人更强的社交能力,可以提高工作效率、降低操作风险,并提升用户体验。未来,该技术有望推广到更广泛的机器人应用领域,例如服务机器人和家庭机器人。
📄 摘要(原文)
This study explores how human perceptions of a non-anthropomorphic robotic manipulator are shaped by two key dimensions of behaviour: arousal, defined as the robot's movement energy and expressiveness, and attention, defined as the robot's capacity to selectively orient toward and engage with a user. We introduce a novel control architecture that integrates a gaze-like attention engine with an arousal-modulated motion system to generate socially meaningful behaviours. In a user study, we find that robots exhibiting high attention -- actively directing their focus toward users -- are perceived as warmer and more competent, intentional, and lifelike. In contrast, high arousal -- characterized by fast, expansive, and energetic motions -- increases perceptions of discomfort and disturbance. Importantly, a combination of focused attention and moderate arousal yields the highest ratings of trust and sociability, while excessive arousal diminishes social engagement. These findings offer design insights for endowing non-humanoid robots with expressive, intuitive behaviours that support more natural human-robot interaction.