Safe Navigation in Dynamic Environments Using Data-Driven Koopman Operators and Conformal Prediction
作者: Kaier Liang, Guang Yang, Mingyu Cai, Cristian-Ioan Vasile
分类: cs.RO
发布日期: 2025-04-01 (更新: 2025-05-01)
💡 一句话要点
提出基于数据驱动Koopman算子和共形预测的动态环境安全导航框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 安全导航 Koopman算子 共形预测 模型预测控制 动态环境
📋 核心要点
- 现有动态环境导航方法难以有效处理非线性动力学和不确定性,导致安全保障不足。
- 利用数据驱动的Koopman算子学习非线性动力学,并结合共形预测量化不确定性,提供统计保证。
- 通过约束收紧将不确定性融入MPC,并采用分层控制架构,在仿真中验证了方法的有效性。
📝 摘要(中文)
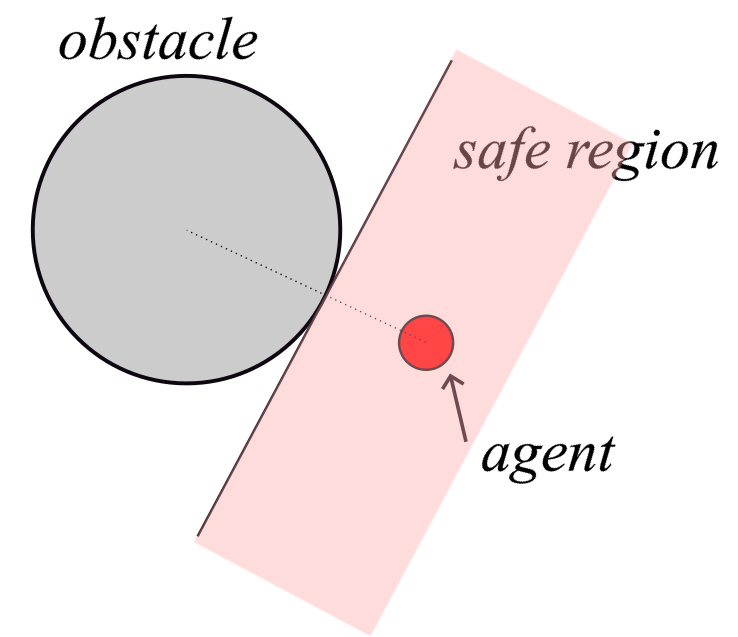
本文提出了一种新颖的动态环境安全导航框架,该框架结合了Koopman算子理论与共形预测。我们的方法利用数据驱动的Koopman近似来学习非线性动力学,并采用共形预测来量化不确定性,从而为近似误差提供统计保证。这种不确定性通过约束收紧有效地融入到模型预测控制(MPC)公式中,确保了鲁棒的安全保证。我们实现了一个分层控制架构,其中参考生成器为安全导航提供航路点。我们的方法的有效性已在仿真中得到验证。
🔬 方法详解
问题定义:论文旨在解决动态环境中机器人安全导航的问题。现有方法在处理非线性动力学和环境不确定性方面存在不足,难以保证导航过程的安全性。尤其是在复杂环境中,预测误差可能导致碰撞等安全问题。
核心思路:论文的核心思路是利用数据驱动的Koopman算子来近似非线性动力学系统,并使用共形预测来量化模型预测的不确定性。通过将这种不确定性纳入模型预测控制(MPC)框架中,可以实现更鲁棒和安全的导航。Koopman算子可以将非线性系统线性化,便于控制器的设计。共形预测则提供了一种统计上可靠的方式来估计预测误差的范围。
技术框架:该方法采用分层控制架构。首先,参考生成器产生一系列航路点,作为期望轨迹。然后,数据驱动的Koopman算子用于学习环境的动态模型。接下来,使用共形预测来估计模型预测的不确定性。最后,将不确定性信息融入到MPC中,通过约束收紧来确保安全。MPC控制器根据当前状态和环境信息,计算出最优的控制输入,驱动机器人安全地沿着参考轨迹运动。
关键创新:该方法的主要创新在于将数据驱动的Koopman算子和共形预测相结合,用于动态环境下的安全导航。与传统的基于模型的控制方法相比,该方法能够更好地处理非线性动力学和不确定性。与传统的鲁棒控制方法相比,共形预测提供了一种更精确和统计上可靠的不确定性量化方法。
关键设计:Koopman算子的具体实现方式(例如,选择合适的观测函数和训练数据)会影响模型的精度。共形预测的关键在于选择合适的非一致性度量和置信水平。MPC控制器的设计需要仔细考虑约束收紧的程度,以在安全性和性能之间取得平衡。参考生成器的设计也需要考虑环境的复杂性和机器人的运动能力。
🖼️ 关键图片
📊 实验亮点
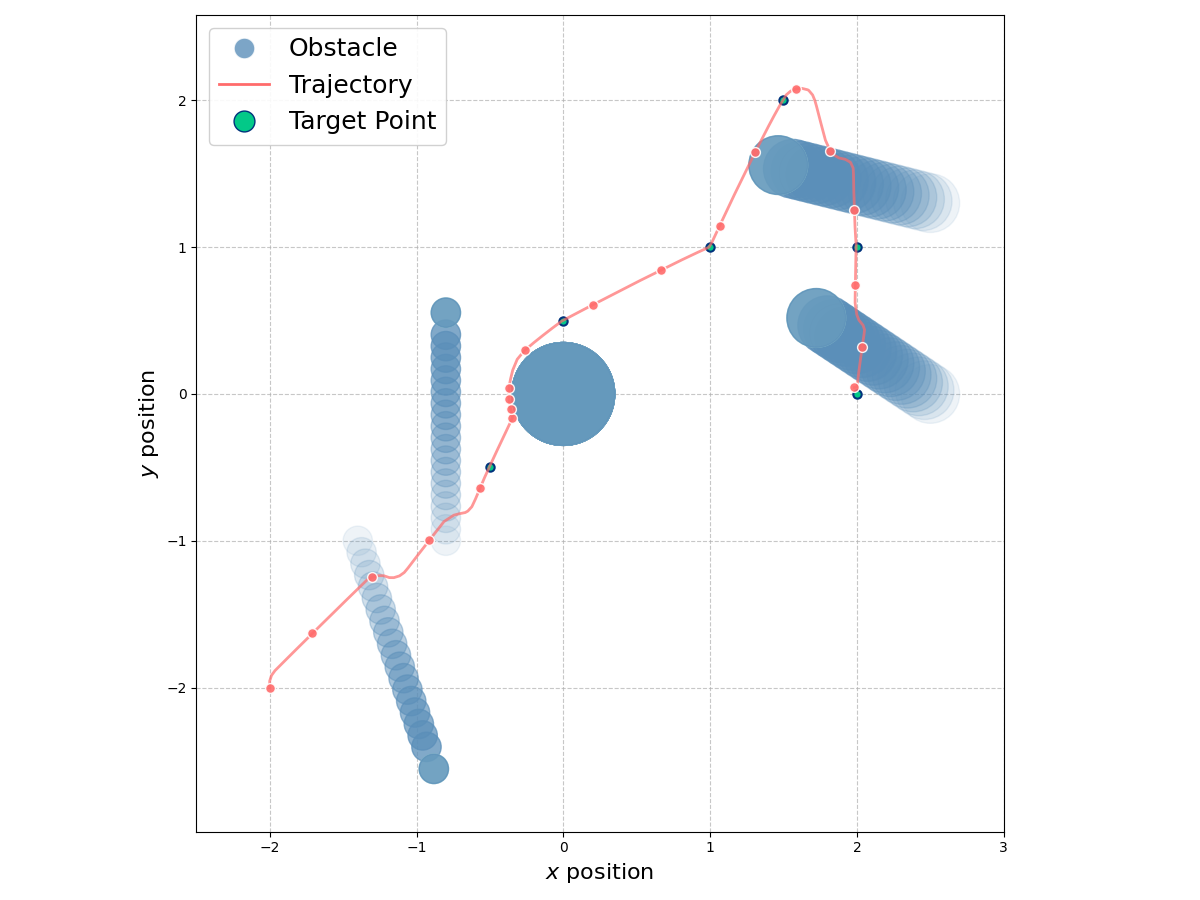
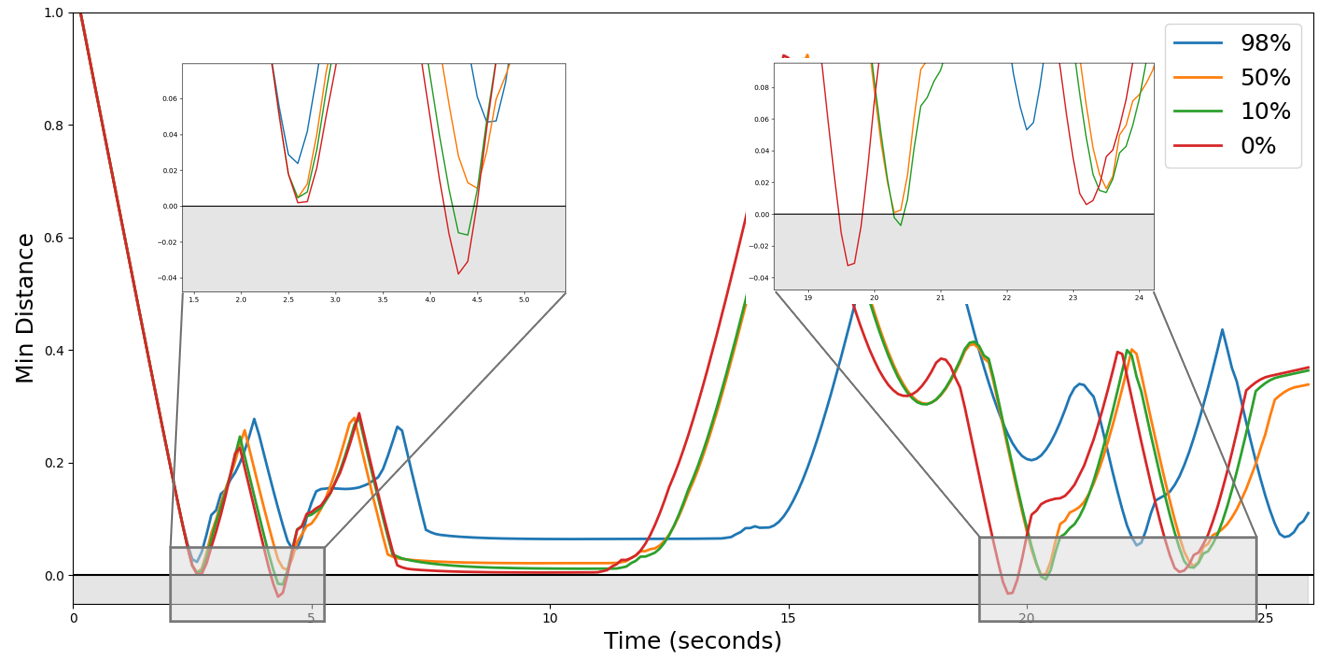
论文通过仿真实验验证了所提出方法的有效性。实验结果表明,该方法能够在动态环境中实现安全导航,并能够有效地处理非线性动力学和不确定性。具体的性能数据和对比基线在论文中给出,展示了该方法相对于传统方法的优势。
🎯 应用场景
该研究成果可应用于各种需要在动态环境中安全导航的机器人系统,例如自动驾驶汽车、无人机、仓储机器人等。通过提供更可靠的安全保障,可以提高这些系统在复杂和不确定环境中的运行效率和可靠性,降低事故风险。未来,该方法可以进一步扩展到多智能体系统,实现更复杂的协同导航任务。
📄 摘要(原文)
We propose a novel framework for safe navigation in dynamic environments by integrating Koopman operator theory with conformal prediction. Our approach leverages data-driven Koopman approximation to learn nonlinear dynamics and employs conformal prediction to quantify uncertainty, providing statistical guarantees on approximation errors. This uncertainty is effectively incorporated into a Model Predictive Controller (MPC) formulation through constraint tightening, ensuring robust safety guarantees. We implement a layered control architecture with a reference generator providing waypoints for safe navigation. The effectiveness of our methods is validated in simulation.