Sim-and-Real Co-Training: A Simple Recipe for Vision-Based Robotic Manipulation
作者: Abhiram Maddukuri, Zhenyu Jiang, Lawrence Yunliang Chen, Soroush Nasiriany, Yuqi Xie, Yu Fang, Wenqi Huang, Zu Wang, Zhenjia Xu, Nikita Chernyadev, Scott Reed, Ken Goldberg, Ajay Mandlekar, Linxi Fan, Yuke Zhu
分类: cs.RO, cs.AI, cs.LG
发布日期: 2025-03-31 (更新: 2025-04-02)
备注: Project website: https://co-training.github.io/
💡 一句话要点
提出一种简单有效的Sim-and-Real协同训练方法,提升视觉机器人操作任务性能。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: Sim-and-Real协同训练 视觉机器人操作 机器人学习 仿真数据 领域自适应
📋 核心要点
- 真实机器人数据收集成本高昂,而仅依赖仿真数据存在现实差距,难以直接迁移到真实世界。
- 提出Sim-and-Real协同训练方法,混合使用仿真和真实数据训练策略,以提升真实环境性能。
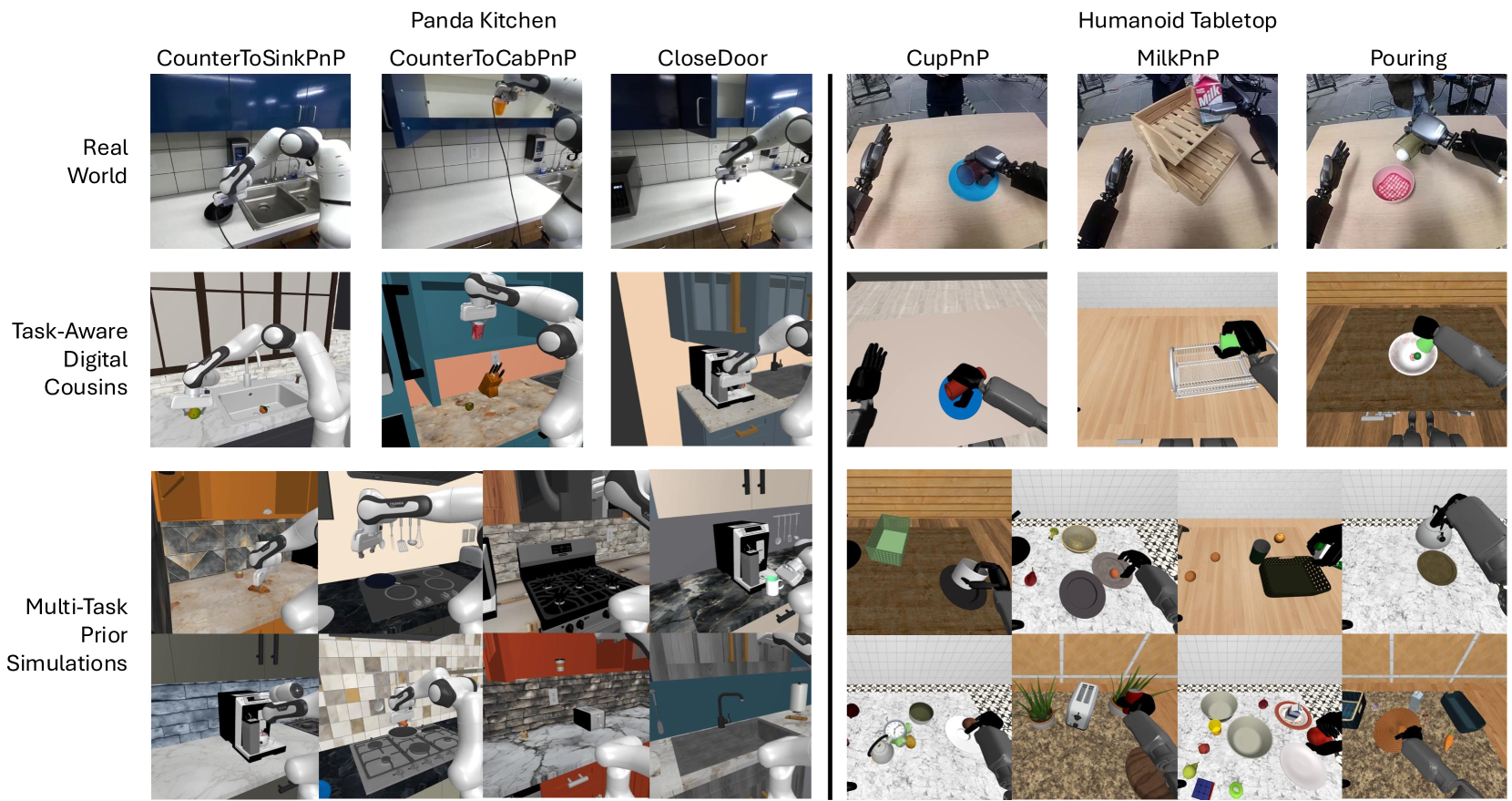
- 在机器人手臂和人形机器人等多种任务上验证,仿真数据能显著提升真实环境任务性能,平均提升38%。
📝 摘要(中文)
大型真实机器人数据集在训练通用机器人模型方面具有巨大潜力,但真实世界的人工数据收集耗时且资源密集。仿真在补充大规模数据方面具有巨大潜力,尤其是在生成式人工智能和自动化数据生成工具取得最新进展的情况下,这些工具能够实现机器人行为数据集的可扩展创建。然而,仅在仿真中训练策略并将其转移到现实世界通常需要大量的人工努力来弥合现实差距。一个引人注目的替代方案是在仿真和真实世界数据集的混合上共同训练策略。初步研究表明,与仅在有限的真实世界数据上训练的策略相比,这种策略可以显著提高策略的性能。尽管如此,社区缺乏对sim-and-real协同训练的系统理解,以及如何利用仿真数据来促进真实机器人学习。这项工作提出了一种简单而有效的配方,用于利用仿真数据来解决基于视觉的机器人操作任务。我们从全面的实验中得出这个配方,这些实验验证了各种仿真和真实世界数据集上的协同训练策略。使用两个领域——机器人手臂和人形机器人——跨越不同的任务,我们证明了仿真数据可以将真实世界的任务性能平均提高38%,即使仿真和真实世界数据之间存在显著差异。
🔬 方法详解
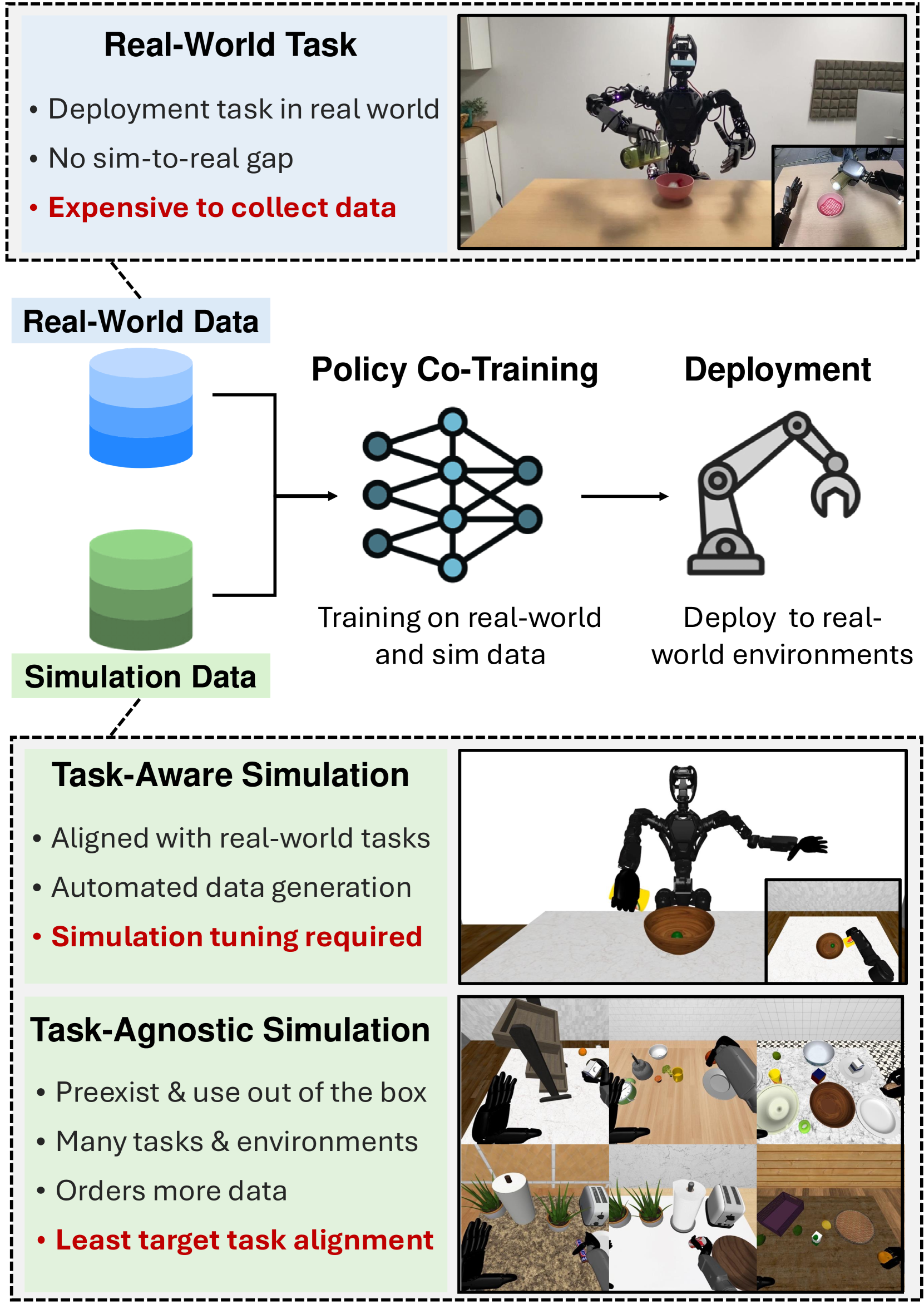
问题定义:论文旨在解决视觉机器人操作任务中,真实数据获取困难以及仿真数据与真实环境存在差距的问题。现有方法要么依赖大量昂贵的真实数据,要么难以将纯仿真训练的模型有效迁移到真实世界,导致性能下降。
核心思路:论文的核心思路是Sim-and-Real协同训练,即同时利用仿真数据和少量真实数据进行训练。通过仿真数据提供丰富的训练样本,真实数据弥补仿真与现实的差距,从而提升模型在真实环境中的泛化能力。
技术框架:整体框架包含两个主要部分:仿真环境和真实环境。首先,在仿真环境中生成大量的训练数据。然后,将仿真数据和少量真实数据混合,用于训练机器人控制策略。训练过程中,模型同时学习仿真环境和真实环境的特征,从而提高在真实环境中的性能。
关键创新:该方法的核心创新在于协同训练的配方,即如何有效地混合仿真数据和真实数据。论文通过大量的实验,探索了不同的数据混合比例、训练策略等因素对性能的影响,并总结出一套简单有效的协同训练方法。
关键设计:论文的关键设计包括:1) 数据增强策略,用于增加数据的多样性,缓解仿真与现实的差距;2) 损失函数的设计,平衡仿真数据和真实数据对模型的影响;3) 网络结构的选择,采用适合视觉机器人操作任务的网络结构。
🖼️ 关键图片

📊 实验亮点
实验结果表明,Sim-and-Real协同训练方法在机器人手臂和人形机器人等多种任务上均取得了显著的性能提升。与仅使用真实数据训练的模型相比,该方法能够将真实环境中的任务性能平均提高38%,证明了仿真数据在机器人学习中的巨大潜力。即使仿真和真实环境存在显著差异,该方法依然有效。
🎯 应用场景
该研究成果可广泛应用于各种视觉机器人操作任务,例如工业自动化、家庭服务机器人、医疗机器人等。通过利用仿真数据降低数据收集成本,并提高机器人在复杂真实环境中的适应能力,加速机器人的实际应用和普及。未来,该方法有望与其他技术结合,例如强化学习、模仿学习等,进一步提升机器人的智能化水平。
📄 摘要(原文)
Large real-world robot datasets hold great potential to train generalist robot models, but scaling real-world human data collection is time-consuming and resource-intensive. Simulation has great potential in supplementing large-scale data, especially with recent advances in generative AI and automated data generation tools that enable scalable creation of robot behavior datasets. However, training a policy solely in simulation and transferring it to the real world often demands substantial human effort to bridge the reality gap. A compelling alternative is to co-train the policy on a mixture of simulation and real-world datasets. Preliminary studies have recently shown this strategy to substantially improve the performance of a policy over one trained on a limited amount of real-world data. Nonetheless, the community lacks a systematic understanding of sim-and-real co-training and what it takes to reap the benefits of simulation data for real-robot learning. This work presents a simple yet effective recipe for utilizing simulation data to solve vision-based robotic manipulation tasks. We derive this recipe from comprehensive experiments that validate the co-training strategy on various simulation and real-world datasets. Using two domains--a robot arm and a humanoid--across diverse tasks, we demonstrate that simulation data can enhance real-world task performance by an average of 38%, even with notable differences between the simulation and real-world data. Videos and additional results can be found at https://co-training.github.io/