HACTS: a Human-As-Copilot Teleoperation System for Robot Learning
作者: Zhiyuan Xu, Yinuo Zhao, Kun Wu, Ning Liu, Junjie Ji, Zhengping Che, Chi Harold Liu, Jian Tang
分类: cs.RO, cs.LG
发布日期: 2025-03-31 (更新: 2025-12-15)
💡 一句话要点
提出HACTS人机协同遥操作系统,提升机器人学习中的人机交互效率
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 遥操作 人机协作 机器人学习 模仿学习 强化学习 双边控制 实时同步
📋 核心要点
- 现有遥操作系统缺乏机器人状态与硬件的实时同步,限制了人机交互的灵活性和实时干预能力。
- HACTS通过建立机器人手臂与遥操作硬件的双边实时同步,使人类能够像副驾驶一样无缝介入并纠正机器人动作。
- 实验表明,HACTS显著提升了模仿学习和强化学习的性能,提高了数据效率和人机协作能力。
📝 摘要(中文)
本文提出了一种名为HACTS(Human-As-Copilot Teleoperation System)的新型遥操作系统,旨在实现机器人手臂与遥操作硬件之间的双边、实时联合同步。这种简单而有效的反馈机制,类似于自动驾驶汽车中的方向盘,使人类副驾驶员能够无缝地进行干预,同时收集动作校正数据以供未来学习。HACTS采用3D打印组件和低成本的现成电机实现,具有良好的可访问性和可扩展性。实验结果表明,HACTS显著提高了模仿学习(IL)和强化学习(RL)任务的性能,增强了IL的恢复能力和数据效率,并促进了人机协同强化学习。HACTS为更有效和交互式的人机协作和数据收集铺平了道路,从而提升了机器人操作的能力。
🔬 方法详解
问题定义:现有的遥操作系统主要提供单向控制,缺乏机器人状态与遥操作硬件的实时同步。这使得人类难以实时、灵活地干预机器人的操作,尤其是在需要人类演示或纠正的复杂操作任务中。因此,如何建立一个能够实现双向通信和实时同步的人机协同遥操作系统,是本文要解决的核心问题。
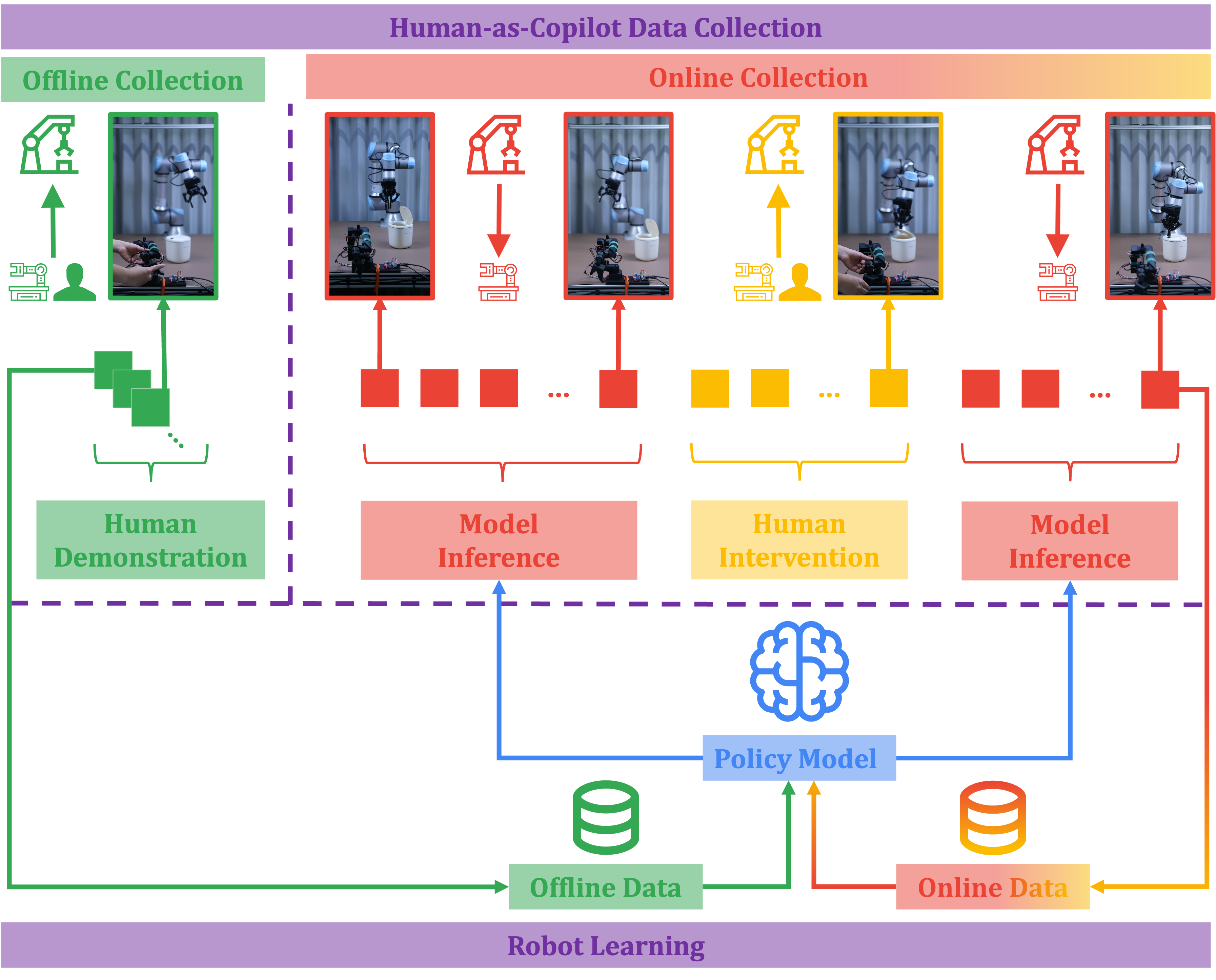
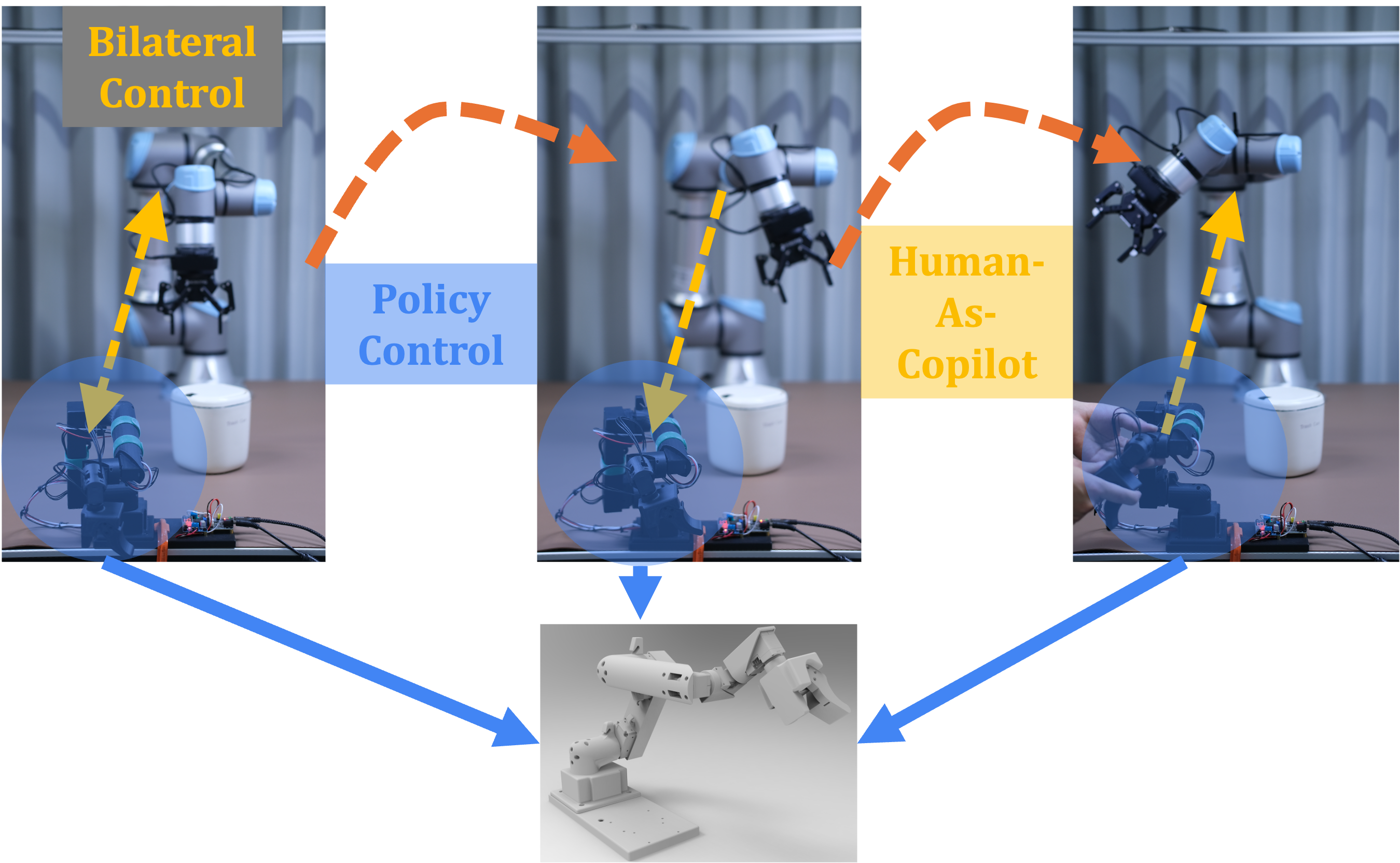
核心思路:HACTS的核心思路是建立机器人手臂和遥操作硬件之间的双边、实时联合同步机制。通过这种机制,人类操作者可以像自动驾驶汽车中的副驾驶一样,实时感知机器人的状态,并在必要时进行干预和纠正。这种设计使得人机协作更加自然和高效。
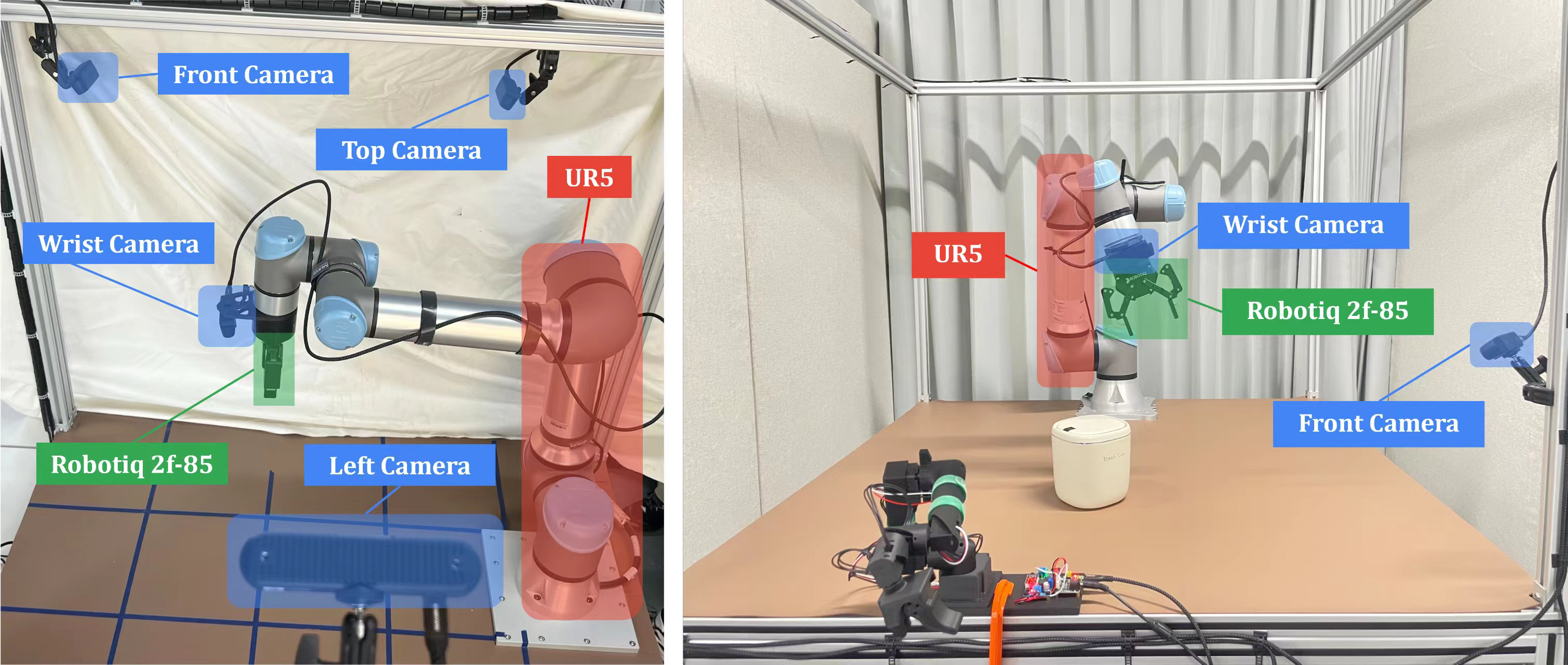
技术框架:HACTS系统主要包含以下几个模块:1) 遥操作硬件:由3D打印组件和低成本电机组成,用于接收人类操作者的指令并将其转化为机器人的动作。2) 机器人手臂:执行遥操作硬件发送的指令,并实时反馈自身的状态信息。3) 双边同步模块:负责建立遥操作硬件和机器人手臂之间的实时通信,实现状态同步和力反馈。4) 数据收集模块:记录人类操作者的干预和纠正动作,用于后续的模仿学习和强化学习。
关键创新:HACTS最重要的技术创新在于其双边、实时联合同步机制。与传统的单向遥操作系统不同,HACTS能够实现机器人状态和遥操作硬件之间的实时反馈,使得人类操作者能够更加直观地感知机器人的状态,并进行更加精准的干预。这种机制极大地提高了人机协作的效率和灵活性。
关键设计:HACTS的关键设计包括:1) 采用低成本的3D打印组件和现成电机,降低了系统的成本和复杂性,使其更易于访问和扩展。2) 设计了高效的双边同步算法,保证了机器人状态和遥操作硬件之间的实时通信。3) 实现了力反馈功能,使人类操作者能够感受到机器人与环境之间的交互力,从而更好地控制机器人的操作。
🖼️ 关键图片
📊 实验亮点
实验结果表明,HACTS显著提升了模仿学习(IL)和强化学习(RL)任务的性能。在模仿学习中,HACTS增强了机器人的恢复能力和数据效率。在强化学习中,HACTS促进了人机协同训练,使得机器人能够更快地学习到最优策略。具体数据未知,但整体性能提升显著。
🎯 应用场景
HACTS系统可广泛应用于各种需要人机协作的机器人操作任务中,例如:远程医疗、危险环境下的作业、精细装配等。该系统能够提高机器人操作的效率和安全性,降低对专业操作人员的依赖,并为机器人学习提供高质量的训练数据,具有重要的实际应用价值和广阔的未来发展前景。
📄 摘要(原文)
Teleoperation is essential for autonomous robot learning, especially in manipulation tasks that require human demonstrations or corrections. However, most existing systems only offer unilateral robot control and lack the ability to synchronize the robot's status with the teleoperation hardware, preventing real-time, flexible intervention. In this work, we introduce HACTS (Human-As-Copilot Teleoperation System), a novel system that establishes bilateral, real-time joint synchronization between a robot arm and teleoperation hardware. This simple yet effective feedback mechanism, akin to a steering wheel in autonomous vehicles, enables the human copilot to intervene seamlessly while collecting action-correction data for future learning. Implemented using 3D-printed components and low-cost, off-the-shelf motors, HACTS is both accessible and scalable. Our experiments show that HACTS significantly enhances performance in imitation learning (IL) and reinforcement learning (RL) tasks, boosting IL recovery capabilities and data efficiency, and facilitating human-in-the-loop RL. HACTS paves the way for more effective and interactive human-robot collaboration and data-collection, advancing the capabilities of robot manipulation.