GenSwarm: Scalable Multi-Robot Code-Policy Generation and Deployment via Language Models
作者: Wenkang Ji, Huaben Chen, Mingyang Chen, Guobin Zhu, Lufeng Xu, Roderich Groß, Rui Zhou, Ming Cao, Shiyu Zhao
分类: cs.RO, cs.AI, cs.MA
发布日期: 2025-03-31 (更新: 2025-10-31)
备注: This article has been accepted for publication in npj Robotics
🔗 代码/项目: GITHUB
💡 一句话要点
GenSwarm:利用大语言模型实现可扩展的多机器人代码策略生成与部署
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多机器人系统 代码策略生成 大型语言模型 零样本学习 端到端控制 机器人部署 自然语言指令
📋 核心要点
- 传统多机器人系统控制策略开发流程复杂且耗时,难以灵活适应动态任务。
- GenSwarm利用大型语言模型,根据自然语言指令自动生成和部署多机器人控制策略,实现端到端控制。
- GenSwarm通过多语言代理系统实现零样本学习,并具备可扩展的软硬件架构,支持真实环境部署。
📝 摘要(中文)
本文提出GenSwarm,一个端到端系统,利用大型语言模型根据简单的自然语言用户指令自动生成和部署多机器人任务的控制策略。作为一个多语言代理系统,GenSwarm实现了零样本学习,能够快速适应改变或未见过的任务。代码策略的白盒特性确保了强大的可重复性和可解释性。凭借其可扩展的软硬件架构,GenSwarm支持在模拟和真实世界的多机器人系统上高效部署策略,实现了从指令到执行的端到端功能,对机器人专家和非专家都具有潜在价值。GenSwarm系统的代码已在线提供。
🔬 方法详解
问题定义:多机器人系统的控制策略开发通常需要复杂且人工密集的过程,并且缺乏适应动态任务的灵活性。现有的自动控制策略生成方法需要迭代地手动设计和优化目标函数,延长了开发周期。
核心思路:GenSwarm的核心思路是利用大型语言模型(LLM)的强大能力,直接将自然语言指令转化为可执行的多机器人控制代码。通过这种方式,避免了手动设计目标函数和优化过程,实现了端到端的自动化策略生成和部署。
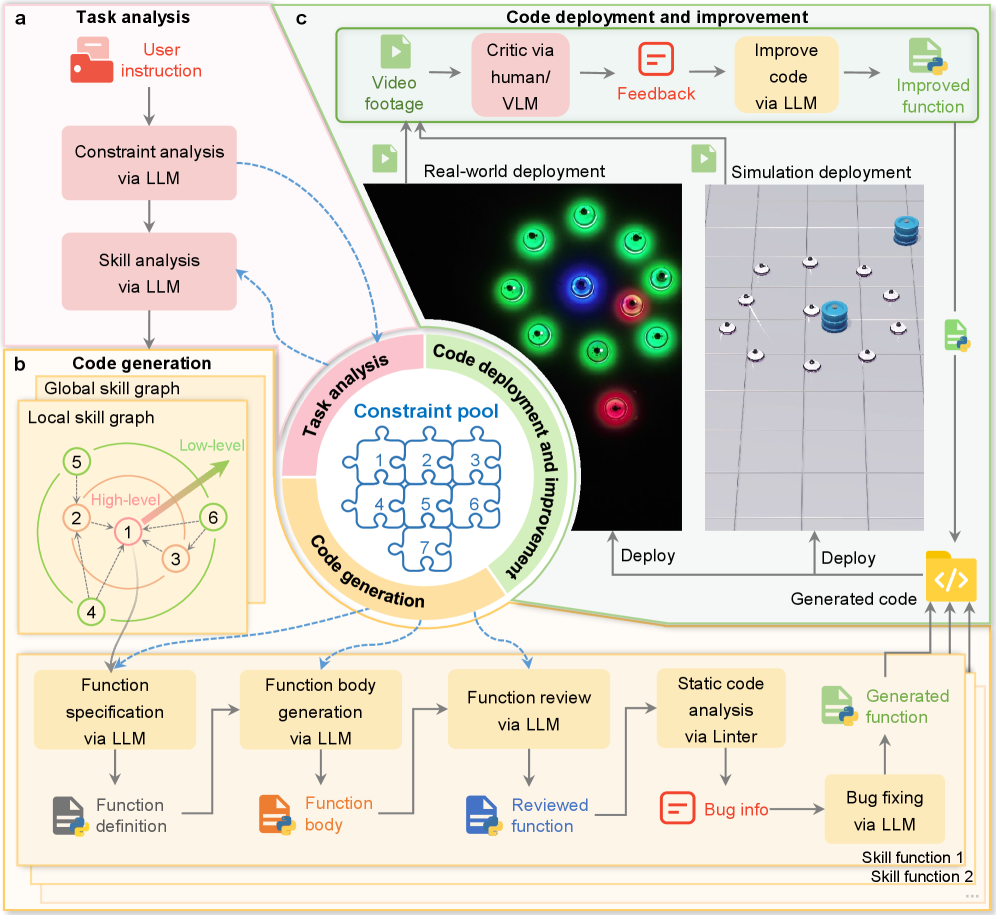
技术框架:GenSwarm是一个多语言代理系统,其整体架构包含以下几个主要阶段:1) 接收用户输入的自然语言指令;2) 利用LLM将指令转化为多机器人控制代码;3) 将生成的代码部署到模拟或真实机器人系统上执行。该系统支持可扩展的软硬件架构,可以方便地部署到不同的机器人平台。
关键创新:GenSwarm的关键创新在于其端到端的自动化流程,以及利用LLM直接生成可执行代码的能力。与传统方法相比,GenSwarm无需手动设计和优化目标函数,大大缩短了开发周期,并提高了策略的灵活性和适应性。此外,生成的代码具有白盒特性,易于理解和调试。
关键设计:GenSwarm的关键设计包括:1) 选择合适的LLM,并进行适当的微调,以提高代码生成的质量和效率;2) 设计有效的代码生成提示(prompt),引导LLM生成符合要求的控制代码;3) 构建可扩展的软硬件架构,支持不同类型的机器人平台和任务。
🖼️ 关键图片


📊 实验亮点
GenSwarm实现了零样本学习,能够快速适应改变或未见过的任务。通过实验验证,GenSwarm能够在模拟和真实世界的多机器人系统上高效部署策略,实现了从指令到执行的端到端功能。代码的白盒特性也保证了策略的可解释性和可重复性。
🎯 应用场景
GenSwarm具有广泛的应用前景,例如在自动化仓库、智能农业、搜救行动等领域,可以快速部署和调整多机器人系统,以适应不同的任务需求。该系统降低了机器人控制策略开发的门槛,使得非专业人员也能轻松地创建和部署多机器人系统,从而加速机器人技术的普及和应用。
📄 摘要(原文)
The development of control policies for multi-robot systems traditionally follows a complex and labor-intensive process, often lacking the flexibility to adapt to dynamic tasks. This has motivated research on methods to automatically create control policies. However, these methods require iterative processes of manually crafting and refining objective functions, thereby prolonging the development cycle. This work introduces \textit{GenSwarm}, an end-to-end system that leverages large language models to automatically generate and deploy control policies for multi-robot tasks based on simple user instructions in natural language. As a multi-language-agent system, GenSwarm achieves zero-shot learning, enabling rapid adaptation to altered or unseen tasks. The white-box nature of the code policies ensures strong reproducibility and interpretability. With its scalable software and hardware architectures, GenSwarm supports efficient policy deployment on both simulated and real-world multi-robot systems, realizing an instruction-to-execution end-to-end functionality that could prove valuable for robotics specialists and non-specialists alike.The code of the proposed GenSwarm system is available online: https://github.com/WindyLab/GenSwarm.