Physically Ground Commonsense Knowledge for Articulated Object Manipulation with Analytic Concepts
作者: Jianhua Sun, Jiude Wei, Yuxuan Li, Cewu Lu
分类: cs.RO, cs.CV
发布日期: 2025-03-30
💡 一句话要点
提出基于物理常识知识和解析概念的铰接物体操作方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 铰接物体操作 常识知识 大型语言模型 解析概念 物理信息表示
📋 核心要点
- 现有方法难以将大型语言模型(LLM)的常识知识有效应用于物理世界的机器人铰接物体操作。
- 论文提出利用解析概念作为桥梁,连接LLM的语义知识和物理世界,实现物理常识知识的有效应用。
- 实验结果表明,该方法在模拟和真实环境中均优于现有方法,实现了更通用、可解释和准确的铰接物体操作。
📝 摘要(中文)
人类依赖广泛的常识知识与物理世界中的大量物体进行交互。同样,这种常识知识对于机器人成功开发通用物体操作技能至关重要。虽然最近大型语言模型(LLM)的进步展示了其在获取常识知识和进行常识推理方面的强大能力,但如何有效地将LLM产生的语义层面的知识与物理世界相结合,从而彻底指导机器人进行通用的铰接物体操作,仍然是一个尚未充分解决的挑战。为此,我们引入了解析概念,这些概念在数学符号上进行程序化定义,可以被机器直接计算和模拟。通过利用解析概念作为LLM推断的语义层面知识与真实机器人运行的物理世界之间的桥梁,我们能够利用物理信息表示来理解物体结构和功能的知识,然后使用物理接地的知识来指导机器人控制策略,从而实现通用、可解释和准确的铰接物体操作。在模拟和真实环境中的大量实验证明了我们方法的优越性。
🔬 方法详解
问题定义:论文旨在解决机器人如何利用常识知识进行通用铰接物体操作的问题。现有方法难以将大型语言模型(LLM)获得的常识知识有效地应用于物理世界,导致机器人操作的泛化性、可解释性和准确性不足。
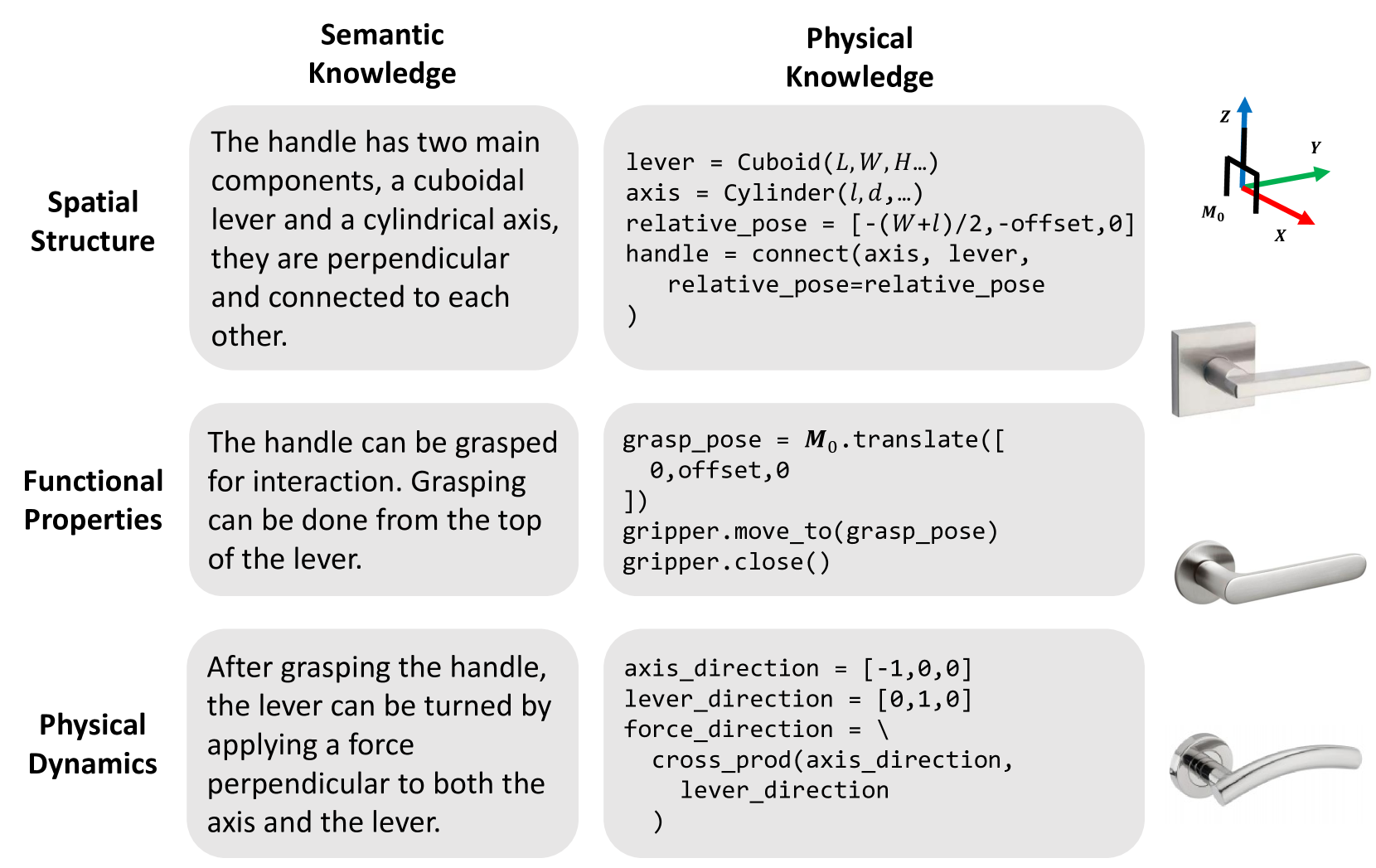
核心思路:论文的核心思路是引入“解析概念”,作为LLM输出的语义知识与机器人所处的物理世界之间的桥梁。解析概念通过数学符号进行程序化定义,可以被机器直接计算和模拟,从而将抽象的常识知识转化为机器人可以理解和执行的物理信息表示。
技术框架:该方法的技术框架包含以下几个主要模块:1) 利用LLM获取关于物体结构和功能的常识知识;2) 将这些常识知识转化为解析概念,例如物体的几何形状、运动学约束等;3) 基于解析概念构建物理信息表示,用于描述物体的结构和功能;4) 利用物理信息表示指导机器人控制策略,实现通用、可解释和准确的铰接物体操作。
关键创新:该方法最重要的技术创新点在于引入了“解析概念”这一中间层,实现了LLM的语义知识与物理世界的有效连接。与直接将LLM的输出应用于机器人控制相比,该方法能够更好地利用物理信息,提高机器人操作的泛化性、可解释性和准确性。
关键设计:论文中关键的设计包括:1) 如何将LLM的输出转化为解析概念,例如使用规则或模板;2) 如何构建物理信息表示,例如使用几何模型、运动学模型等;3) 如何设计机器人控制策略,例如使用强化学习、模型预测控制等。具体的参数设置、损失函数、网络结构等技术细节在论文中进行了详细描述。
🖼️ 关键图片


📊 实验亮点
论文在模拟和真实环境中进行了大量实验,证明了该方法的优越性。实验结果表明,该方法能够显著提高机器人铰接物体操作的成功率、效率和鲁棒性,并且具有良好的可解释性。具体的性能数据和对比基线在论文中进行了详细展示。
🎯 应用场景
该研究成果可应用于各种需要机器人进行铰接物体操作的场景,例如智能家居、自动化装配、医疗康复等。通过赋予机器人更强的常识推理能力和物理理解能力,可以显著提高机器人的智能化水平和工作效率,并为未来的智能机器人发展奠定基础。
📄 摘要(原文)
We human rely on a wide range of commonsense knowledge to interact with an extensive number and categories of objects in the physical world. Likewise, such commonsense knowledge is also crucial for robots to successfully develop generalized object manipulation skills. While recent advancements in Large Language Models (LLM) have showcased their impressive capabilities in acquiring commonsense knowledge and conducting commonsense reasoning, effectively grounding this semantic-level knowledge produced by LLMs to the physical world to thoroughly guide robots in generalized articulated object manipulation remains a challenge that has not been sufficiently addressed. To this end, we introduce analytic concepts, procedurally defined upon mathematical symbolism that can be directly computed and simulated by machines. By leveraging the analytic concepts as a bridge between the semantic-level knowledge inferred by LLMs and the physical world where real robots operate, we are able to figure out the knowledge of object structure and functionality with physics-informed representations, and then use the physically grounded knowledge to instruct robot control policies for generalized, interpretable and accurate articulated object manipulation. Extensive experiments in both simulation and real-world environments demonstrate the superiority of our approach.