Control of Humanoid Robots with Parallel Mechanisms using Differential Actuation Models
作者: Victor Lutz, Ludovic de Matteis, Virgile Batto, Nicolas Mansard
分类: cs.RO, eess.SY
发布日期: 2025-03-28 (更新: 2025-10-08)
💡 一句话要点
提出基于微分驱动模型的并行机构人形机器人控制方法,提升控制精度和鲁棒性。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 人形机器人控制 并行机构 非线性传动 轨迹优化 强化学习 微分驱动 运动学建模
📋 核心要点
- 现有的人形机器人设计中,电机远离关节导致运动学复杂,计算成本高,控制效果受限。
- 论文提出了一种紧凑的解析公式,精确描述膝关节和踝关节的非线性传动,并保持计算效率。
- 实验结果表明,该方法提高了控制精度和鲁棒性,验证了其在现代控制算法中的实用性。
📝 摘要(中文)
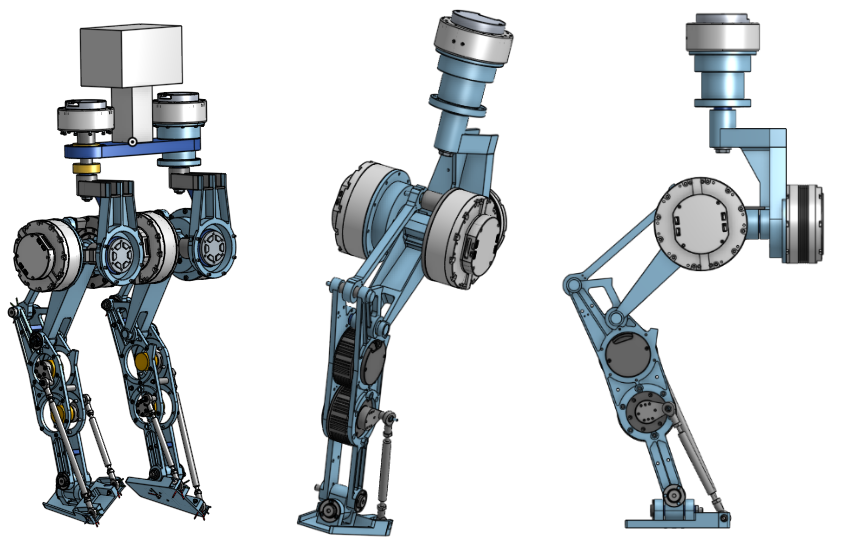
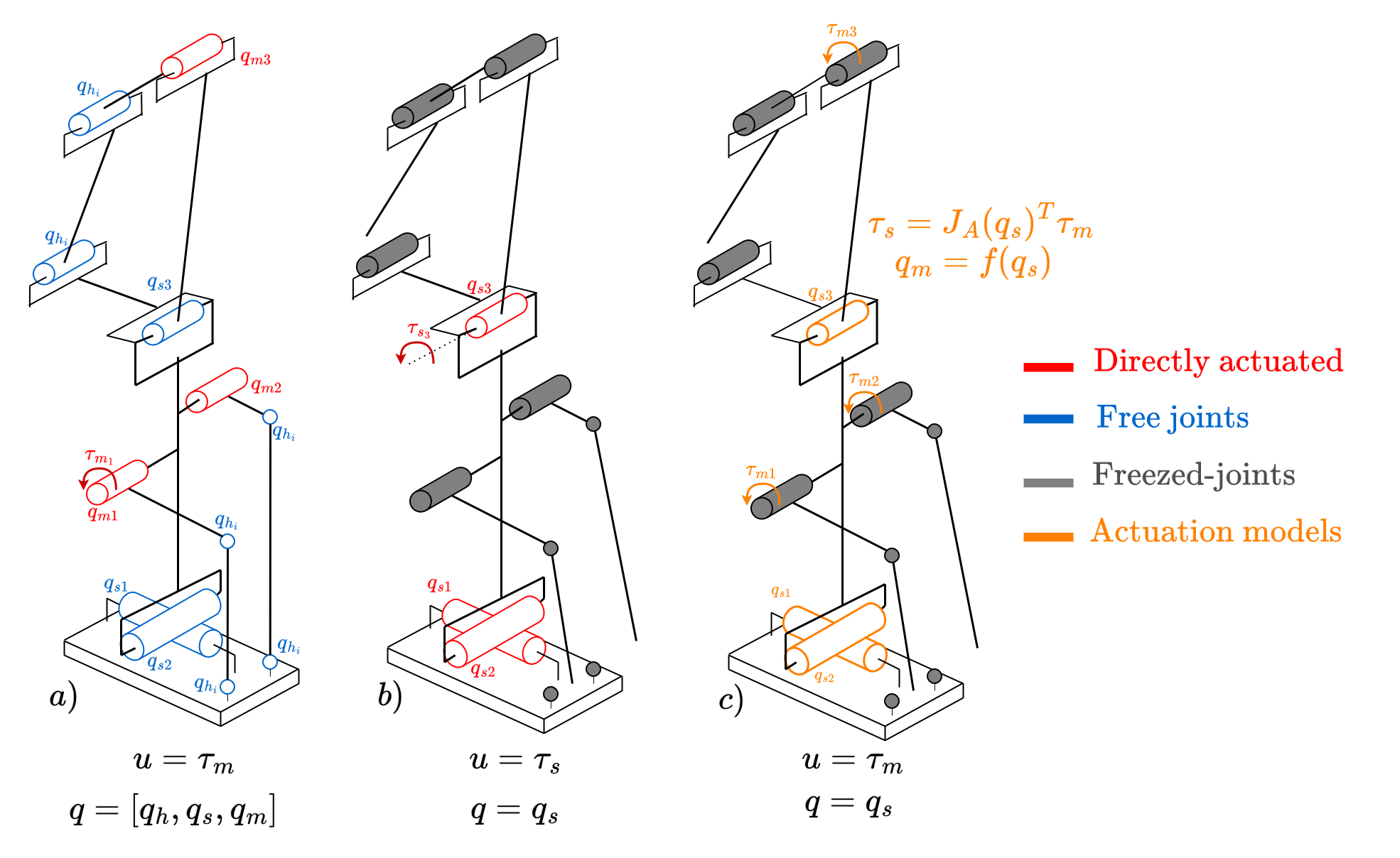
本文针对受Cassie机器人启发的新型人形机器人,其电机远离关节以降低腿部惯量,但由此产生的复杂运动学和回路约束增加了计算成本,限制了其在控制和学习中的应用。通常,非线性传动被简化为恒定减速比,无法充分利用机构的全部能力。本文提出了一种紧凑的解析公式,用于描述两种标准的膝关节和踝关节机构,该公式能够精确捕捉非线性传动,同时保持计算效率。该模型完全可微分至二阶,并具有最小公式,从而能够以低成本评估轨迹优化的动态导数和强化学习的表观传动阻抗。我们将此公式集成到轨迹优化和运动策略学习中,并将其与简化的恒定比率方法进行比较。硬件实验表明,该方法提高了精度和鲁棒性,为将并行驱动集成到现代控制算法中提供了一种实用的方法。
🔬 方法详解
问题定义:现有的人形机器人,特别是那些采用电机远离关节设计的机器人,由于其复杂的运动学和回路约束,导致控制算法的计算成本显著增加。为了简化问题,通常会将非线性传动近似为恒定的减速比,这牺牲了机构的全部潜力,限制了控制性能的提升。因此,需要一种既能精确描述非线性传动,又能保持计算效率的方法。
核心思路:本文的核心思路是为两种常见的膝关节和踝关节机构推导出一个紧凑的解析公式,该公式能够精确地捕捉非线性传动特性。通过使用最小公式和保证二阶可微性,该模型可以高效地计算动态导数和表观传动阻抗,从而支持轨迹优化和强化学习等控制算法。
技术框架:该方法主要包含以下几个步骤:首先,针对特定的膝关节和踝关节并行机构,建立其运动学模型,并推导出精确的非线性传动公式。然后,对该公式进行一阶和二阶求导,得到动态导数信息。接着,将该模型集成到轨迹优化和强化学习框架中,用于生成运动轨迹和学习控制策略。最后,通过硬件实验验证该方法的有效性。
关键创新:该论文的关键创新在于提出了一个紧凑且精确的非线性传动解析模型,该模型能够以低计算成本提供精确的动态信息。与传统的恒定减速比近似方法相比,该模型能够更好地利用机构的全部潜力,从而提高控制性能。此外,该模型的可微性使其能够方便地应用于各种基于梯度的优化和学习算法。
关键设计:该论文的关键设计包括:1) 针对特定的膝关节和踝关节机构,推导出了具体的非线性传动公式;2) 使用最小坐标系来描述机构的运动学,从而减少了计算量;3) 保证了模型的可微性,以便于梯度优化;4) 将该模型集成到现有的轨迹优化和强化学习框架中,并进行了硬件实验验证。
🖼️ 关键图片

📊 实验亮点
硬件实验表明,与使用恒定减速比的简化方法相比,本文提出的方法能够显著提高人形机器人的控制精度和鲁棒性。具体而言,在轨迹优化和运动策略学习中,该方法能够生成更精确的运动轨迹,并提高机器人在面对外部干扰时的稳定性。实验结果验证了该方法在实际应用中的有效性。
🎯 应用场景
该研究成果可广泛应用于新型人形机器人的运动控制领域,尤其适用于那些采用电机远离关节设计的机器人。通过精确建模非线性传动,可以提高机器人的运动精度、平衡能力和能量效率。此外,该方法还可以应用于机器人步态设计、运动规划和人机交互等领域,促进人形机器人在复杂环境中的应用。
📄 摘要(原文)
Several recently released humanoid robots, inspired by the mechanical design of Cassie, employ actuator configurations in which the motors are displaced from the joints to reduce leg inertia. While studies accounting for the full kinematic complexity have demonstrated the benefits of these designs, the associated loop-closure constraints greatly increase computational cost and limit their use in control and learning. As a result, the non-linear transmission is often approximated by a constant reduction ratio, preventing exploitation of the mechanism's full capabilities. This paper introduces a compact analytical formulation for the two standard knee and ankle mechanisms that captures the exact non-linear transmission while remaining computationally efficient. The model is fully differentiable up to second order with a minimal formulation, enabling low-cost evaluation of dynamic derivatives for trajectory optimization and of the apparent transmission impedance for reinforcement learning. We integrate this formulation into trajectory optimization and locomotion policy learning, and compare it against simplified constant-ratio approaches. Hardware experiments demonstrate improved accuracy and robustness, showing that the proposed method provides a practical means to incorporate parallel actuation into modern control algorithms.