Bayesian Inferential Motion Planning Using Heavy-Tailed Distributions
作者: Ali Vaziri, Iman Askari, Huazhen Fang
分类: cs.RO, math.OC, math.PR
发布日期: 2025-03-27 (更新: 2025-05-30)
💡 一句话要点
提出基于Student's-t分布的贝叶斯推断运动规划方法,提升低概率区域探索能力。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 贝叶斯推断 运动规划 重尾分布 Student's-t分布 蒙特卡洛采样 自动驾驶 机器人
📋 核心要点
- 现有贝叶斯运动规划方法难以有效探索规划空间中的低概率区域,可能错过高质量的运动方案。
- 利用Student's-t重尾分布,结合蒙特卡洛采样,提升概率推断搜索能力,从而改善运动规划效果。
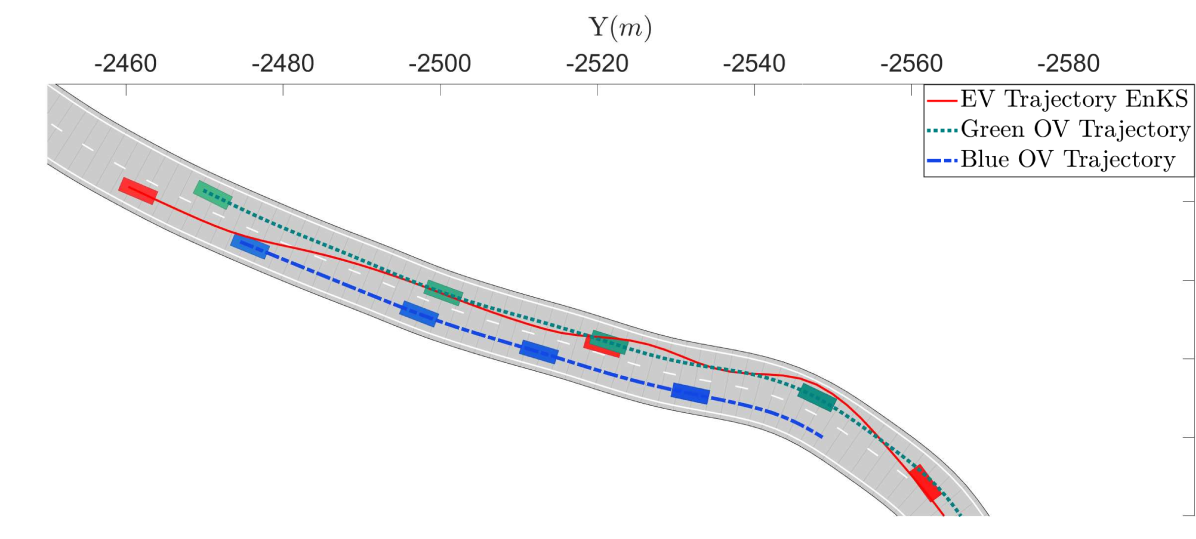
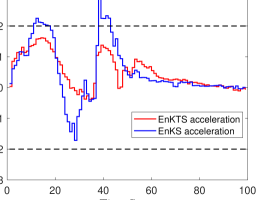
- 在自动驾驶车辆运动规划仿真中,验证了该方法在规划性能、采样效率和约束满足方面的优越性。
📝 摘要(中文)
本文研究了基于贝叶斯推断的运动规划方法,其中运动计划是基于规划目标和约束推断出来的。现有的贝叶斯运动规划方法通常难以探索规划空间中低概率区域,而高质量的计划可能存在于这些区域。为了解决这个限制,我们提出使用重尾分布——特别是Student's-t分布——来增强运动计划的概率推断搜索。我们开发了一种新颖的序贯单程平滑方法,该方法将Student's-t分布与蒙特卡洛采样相结合。集成卡尔曼平滑是该方法的一个特例,它依赖于短尾高斯分布。我们通过自动驾驶车辆运动规划的仿真验证了所提出的方法,证明了其在规划、采样效率和约束满足方面优于集成卡尔曼平滑。虽然专注于运动规划,但这项工作表明了重尾分布在增强机器人概率决策方面的更广泛潜力。
🔬 方法详解
问题定义:论文旨在解决贝叶斯运动规划中,现有方法难以有效探索低概率区域的问题。这些区域可能包含高质量的运动方案,但由于概率较低,传统方法难以发现。现有方法,如基于高斯分布的集成卡尔曼平滑,对异常值敏感,探索能力有限。
核心思路:论文的核心思路是利用重尾分布(特别是Student's-t分布)来替代传统的高斯分布。重尾分布具有更厚的尾部,能够赋予低概率区域更高的采样权重,从而增加探索这些区域的可能性。通过在低概率区域进行更充分的探索,可以发现更好的运动规划方案。
技术框架:论文提出了一种序贯单程平滑方法,将Student's-t分布与蒙特卡洛采样相结合。该方法可以看作是集成卡尔曼平滑的扩展,后者是该方法使用高斯分布的特例。整体流程包括:1) 初始化运动规划空间;2) 使用蒙特卡洛采样生成候选运动方案;3) 使用Student's-t分布对候选方案进行评估和加权;4) 通过序贯平滑过程优化运动方案。
关键创新:关键创新在于将重尾的Student's-t分布引入贝叶斯运动规划中,并设计了相应的序贯单程平滑方法。与使用高斯分布的传统方法相比,该方法能够更有效地探索低概率区域,从而发现更优的运动规划方案。这种方法在概率推断框架下,提升了对规划空间全局的探索能力。
关键设计:论文的关键设计包括:1) Student's-t分布的自由度参数的选择,该参数控制了尾部的厚度,需要根据具体问题进行调整;2) 序贯平滑过程中的采样策略,需要保证采样的多样性和效率;3) 目标函数的设计,需要综合考虑运动规划的目标和约束,例如路径长度、安全性、平滑性等。
🖼️ 关键图片

📊 实验亮点
实验结果表明,与基于高斯分布的集成卡尔曼平滑相比,所提出的基于Student's-t分布的方法在自动驾驶车辆运动规划中表现出更优的性能。具体而言,该方法能够找到更短、更安全的路径,并且能够更好地满足各种约束条件。此外,该方法还具有更高的采样效率,能够在更短的时间内找到高质量的运动方案。
🎯 应用场景
该研究成果可应用于各种需要自主运动规划的机器人系统,例如自动驾驶汽车、无人机、移动机器人等。通过提升运动规划的效率和质量,可以提高机器人的自主性和安全性,使其能够更好地完成各种任务。此外,该方法还可以推广到其他概率决策问题中,例如目标跟踪、状态估计等。
📄 摘要(原文)
Robots rely on motion planning to navigate safely and efficiently while performing various tasks. In this paper, we investigate motion planning through Bayesian inference, where motion plans are inferred based on planning objectives and constraints. However, existing Bayesian motion planning methods often struggle to explore low-probability regions of the planning space, where high-quality plans may reside. To address this limitation, we propose the use of heavy-tailed distributions -- specifically, Student's-$t$ distributions -- to enhance probabilistic inferential search for motion plans. We develop a novel sequential single-pass smoothing approach that integrates Student's-$t$ distribution with Monte Carlo sampling. A special case of this approach is ensemble Kalman smoothing, which depends on short-tailed Gaussian distributions. We validate the proposed approach through simulations in autonomous vehicle motion planning, demonstrating its superior performance in planning, sampling efficiency, and constraint satisfaction compared to ensemble Kalman smoothing. While focused on motion planning, this work points to the broader potential of heavy-tailed distributions in enhancing probabilistic decision-making in robotics.