Benchmarking Multi-Object Grasping
作者: Tianze Chen, Ricardo Frumento, Giulia Pagnanelli, Gianmarco Cei, Villa Keth, Shahaddin Gafarov, Jian Gong, Zihe Ye, Marco Baracca, Salvatore D'Avella, Matteo Bianchi, Yu Sun
分类: cs.RO
发布日期: 2025-03-25 (更新: 2025-03-29)
备注: This paper contains 11 pages and 5 figures. This paper is under review of a robotics journal
💡 一句话要点
提出多物体抓取基准测试,评估机器人操作能力
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多物体抓取 基准测试 机器人操作 机械手 性能评估
📋 核心要点
- 现有机器人抓取研究缺乏统一的评估标准,难以有效比较不同系统的性能。
- 论文提出一套多物体抓取基准测试协议,涵盖不同难度和应用场景。
- 实验在多种机械手上建立基线,并与人类表现对比,为未来研究提供参考。
📝 摘要(中文)
本文介绍了一个多物体抓取基准测试,旨在评估机器人系统在堆叠和表面场景中的抓取和操作能力。该基准测试引入了三种机器人多物体抓取协议,分别挑战机器人操作的不同方面。这些协议包括:1) Only-Pick-Once协议,评估机器人一次性高效抓取多个物体的能力;2) Accurate pick-trnsferring协议,评估机器人从杂乱环境中选择性地抓取和运输特定数量物体的能力;3) Pick-transferring-all协议,挑战机器人通过连续抓取和转移所有可用物体来清理整个场景。这些协议旨在被更广泛的机器人研究社区采用,为评估和比较机器人系统在多物体抓取任务中的性能提供一种标准化方法。我们使用标准的规划和感知算法,在Barrett手爪、Robotiq平行爪夹持器和Pisa/IIT Softhand-2(一种软体欠驱动机器人手)上建立了这些协议的基线。我们讨论了这些结果与人类在类似任务中的表现的关系。
🔬 方法详解
问题定义:论文旨在解决机器人多物体抓取能力缺乏标准化评估的问题。现有方法难以在不同机器人系统和算法之间进行公平比较,阻碍了该领域的发展。现有的抓取评估往往集中于单个物体的抓取,而忽略了实际应用中常见的复杂多物体场景。
核心思路:核心思路是通过设计一系列具有不同挑战性的基准测试协议,来全面评估机器人在多物体抓取任务中的性能。这些协议涵盖了抓取效率、准确性和场景清理能力等多个方面,从而为机器人抓取研究提供一个统一的评估框架。
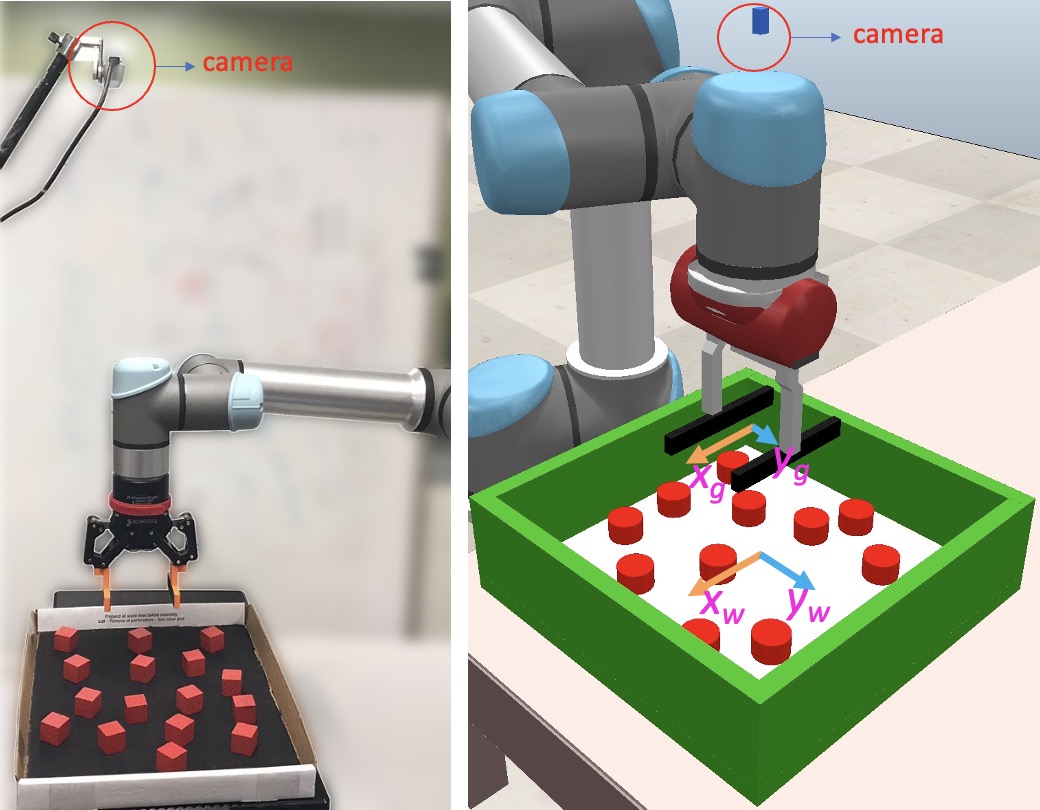
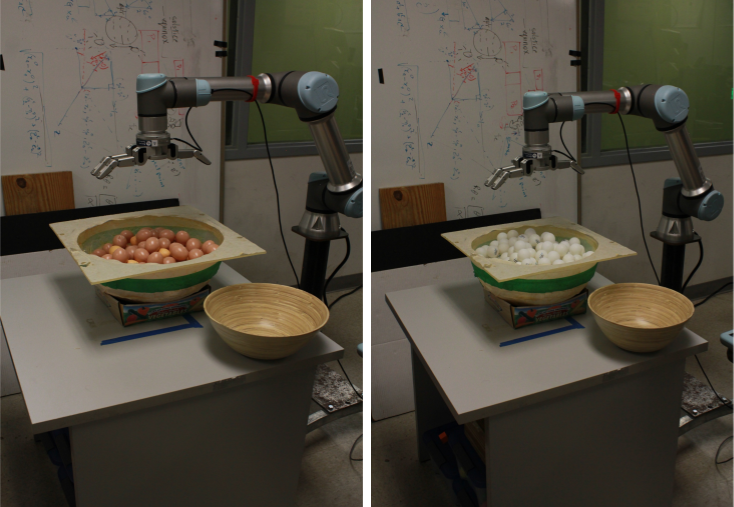
技术框架:该基准测试包含三个主要协议:Only-Pick-Once协议、Accurate pick-trnsferring协议和Pick-transferring-all协议。Only-Pick-Once协议评估机器人单次抓取多个物体的能力;Accurate pick-trnsferring协议评估机器人选择性抓取和转移特定数量物体的能力;Pick-transferring-all协议评估机器人清理整个场景的能力。每个协议都定义了明确的评估指标和流程。
关键创新:该论文的关键创新在于提出了一个全面的多物体抓取基准测试,涵盖了不同难度和应用场景。与以往侧重于单物体抓取的评估方法不同,该基准测试更贴近实际应用,能够更有效地评估机器人在复杂环境下的抓取能力。此外,论文还提供了在多种机械手上的基线结果,为未来的研究提供参考。
关键设计:论文的关键设计在于三个协议的设计,每个协议都针对不同的抓取挑战。例如,Accurate pick-trnsferring协议需要机器人具备精确的物体识别和抓取能力,而Pick-transferring-all协议则需要机器人具备高效的场景清理策略。论文还详细描述了每个协议的评估指标,例如抓取成功率、抓取时间等。
🖼️ 关键图片
📊 实验亮点
论文在Barrett手爪、Robotiq平行爪夹持器和Pisa/IIT Softhand-2三种不同的机械手上进行了基线测试,为后续研究提供了可比较的参考数据。通过与人类在类似任务中的表现进行对比,揭示了现有机器人抓取技术与人类水平之间的差距,为未来的研究方向提供了启示。
🎯 应用场景
该研究成果可广泛应用于工业自动化、物流、家庭服务等领域。例如,在仓库中,机器人可以利用该基准测试评估其拣选效率和准确性;在家庭环境中,机器人可以利用该基准测试评估其清理杂乱场景的能力。该基准测试的标准化将促进机器人抓取技术的进步,并加速机器人在实际应用中的部署。
📄 摘要(原文)
In this work, we describe a multi-object grasping benchmark to evaluate the grasping and manipulation capabilities of robotic systems in both pile and surface scenarios. The benchmark introduces three robot multi-object grasping benchmarking protocols designed to challenge different aspects of robotic manipulation. These protocols are: 1) the Only-Pick-Once protocol, which assesses the robot's ability to efficiently pick multiple objects in a single attempt; 2) the Accurate pick-trnsferring protocol, which evaluates the robot's capacity to selectively grasp and transport a specific number of objects from a cluttered environment; and 3) the Pick-transferring-all protocol, which challenges the robot to clear an entire scene by sequentially grasping and transferring all available objects. These protocols are intended to be adopted by the broader robotics research community, providing a standardized method to assess and compare robotic systems' performance in multi-object grasping tasks. We establish baselines for these protocols using standard planning and perception algorithms on a Barrett hand, Robotiq parallel jar gripper, and the Pisa/IIT Softhand-2, which is a soft underactuated robotic hand. We discuss the results in relation to human performance in similar tasks we well.