NMPC-based Unified Posture Manipulation and Thrust Vectoring for Fault Recovery
作者: Adarsh Salagame, Shashwat Pandya, Ioannis Mandralis, Eric Sihite, Alireza Ramezani, Morteza Gharib
分类: cs.RO, eess.SY
发布日期: 2025-03-24
💡 一句话要点
提出基于NMPC的姿态控制与推力矢量统一方法,用于多旋翼飞行器故障恢复
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多旋翼飞行器 故障恢复 非线性模型预测控制 姿态控制 推力矢量 容错控制 无人机
📋 核心要点
- 多旋翼飞行器在高空执行任务时,执行器故障是导致坠毁的主要风险,现有方法在快速故障恢复方面存在不足。
- 论文提出一种统一姿态控制和推力矢量的方法,通过非线性模型预测控制(NMPC)实现快速故障恢复。
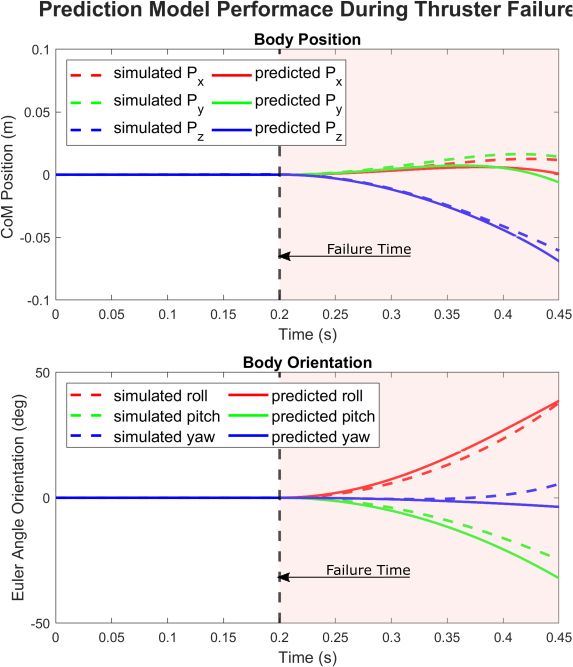
- 通过Simscape中M4机器人的高保真模型仿真,验证了所提出的NMPC控制器的故障恢复能力。
📝 摘要(中文)
多旋翼飞行器面临着重大风险,在高空发生的执行器故障很容易导致坠毁和机器人损毁。因此,在执行器发生故障时快速恢复对于无人飞行机器人的容错和安全运行至关重要。本文提出了一种基于姿态控制和推力矢量统一的故障恢复方法。这项工作的主要贡献是:1)推导了能够捕捉姿态控制和推力矢量的两种飞行动力学模型(高保真和降阶)。2)设计了一种基于非线性模型预测控制(NMPC)的控制器,并在Simscape中使用多模态移动变形机器人(M4)的高保真模型进行了仿真,验证了故障恢复能力。
🔬 方法详解
问题定义:论文旨在解决多旋翼飞行器在执行器发生故障时,如何快速、安全地恢复飞行姿态并避免坠毁的问题。现有方法可能无法在故障发生后迅速调整姿态和推力,导致飞行器失控。
核心思路:论文的核心思路是将姿态控制和推力矢量控制统一起来考虑,利用冗余的执行器或推力矢量能力,在部分执行器失效时,通过调整剩余执行器的输出来补偿失效的执行器,从而维持飞行器的稳定性和可控性。这种统一控制策略能够更有效地应对故障,实现快速恢复。
技术框架:该方法主要包含以下几个阶段:首先,建立多旋翼飞行器的高保真和降阶动力学模型,该模型能够准确描述姿态控制和推力矢量之间的关系。然后,基于建立的动力学模型,设计一个基于非线性模型预测控制(NMPC)的控制器。该控制器能够根据当前状态和预测的未来状态,优化控制输入,从而实现故障恢复。最后,通过仿真实验验证控制器的性能。
关键创新:该方法最重要的技术创新点在于将姿态控制和推力矢量控制统一建模和控制。传统的故障恢复方法通常将姿态控制和推力矢量控制分开考虑,导致控制效果不佳。而该方法通过统一建模和控制,能够更有效地利用飞行器的冗余能力,实现快速故障恢复。
关键设计:论文中关键的设计包括:1)高保真和降阶动力学模型的建立,需要准确描述飞行器的运动学和动力学特性。2)NMPC控制器的设计,需要选择合适的预测时域、控制时域和目标函数。目标函数通常包含姿态误差、位置误差和控制输入的惩罚项。3)故障检测和隔离机制,需要在故障发生后快速检测到故障并隔离失效的执行器。
🖼️ 关键图片


📊 实验亮点
论文通过Simscape中的M4机器人高保真模型进行了仿真实验,验证了所提出的NMPC控制器的故障恢复能力。实验结果表明,该控制器能够在执行器发生故障后迅速调整姿态和推力,使飞行器恢复稳定飞行,有效避免了坠毁。
🎯 应用场景
该研究成果可应用于各种无人机平台,尤其是在高风险环境中执行任务的无人机,例如高空巡检、灾害救援和物流运输。通过提高无人机的容错能力,可以降低事故发生的概率,保障人员和财产安全,并扩展无人机的应用范围。
📄 摘要(原文)
Multi-rotors face significant risks, as actuator failures at high altitudes can easily result in a crash and the robot's destruction. Therefore, rapid fault recovery in the event of an actuator failure is necessary for the fault-tolerant and safe operation of unmanned aerial robots. In this work, we present a fault recovery approach based on the unification of posture manipulation and thrust vectoring. The key contributions of this work are: 1) Derivation of two flight dynamics models (high-fidelity and reduced-order) that capture posture control and thrust vectoring. 2) Design of a controller based on Nonlinear Model Predictive Control (NMPC) and demonstration of fault recovery in simulation using a high-fidelity model of the Multi-Modal Mobility Morphobot (M4) in Simscape.