Splat-LOAM: Gaussian Splatting LiDAR Odometry and Mapping
作者: Emanuele Giacomini, Luca Di Giammarino, Lorenzo De Rebotti, Giorgio Grisetti, Martin R. Oswald
分类: cs.RO, cs.CV
发布日期: 2025-03-21
备注: submitted to ICCV 2025
💡 一句话要点
Splat-LOAM:提出基于高斯溅射的激光雷达里程计与建图方法
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 激光雷达 里程计 建图 高斯溅射 三维重建
📋 核心要点
- 现有激光雷达里程计和建图方法在精度、内存占用和计算效率之间存在权衡,难以同时满足实时性和高精度需求。
- Splat-LOAM利用高斯溅射表示场景,并仅使用激光雷达数据驱动高斯基元的优化,从而实现高效的场景表示和重建。
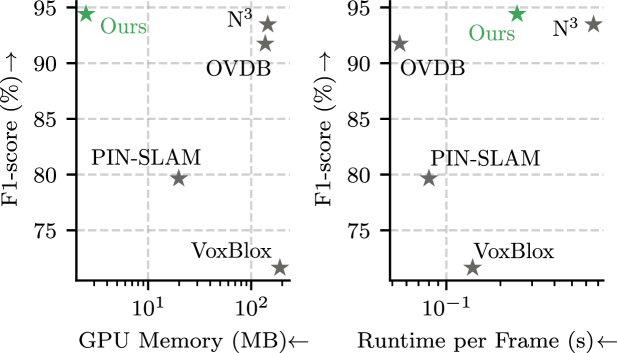
- 实验结果表明,Splat-LOAM在保持配准性能的同时,在建图任务上达到了SOTA水平,且对GPU资源的需求很低。
📝 摘要(中文)
激光雷达能够提供精确的几何测量,使其在自运动估计和重建任务中具有重要价值。尽管激光雷达技术取得了成功,但如何管理环境的精确且轻量级的表示仍然面临挑战。经典方法和基于NeRF的解决方案都必须在精度、内存和处理时间之间进行权衡。本文基于高斯溅射方法的最新进展,开发了一种新颖的激光雷达里程计和建图流程,该流程完全依赖于高斯基元进行场景表示。利用球面投影,我们仅从激光雷达测量中驱动基元的细化。实验表明,我们的方法在匹配当前配准性能的同时,在建图任务中实现了SOTA结果,并且GPU需求极低。这种效率使其成为进一步探索和潜在应用于实时机器人估计任务的有力候选者。
🔬 方法详解
问题定义:现有激光雷达里程计和建图方法,如传统ICP和基于NeRF的方法,在环境表示上存在局限性。传统方法精度有限,而NeRF方法计算量大,难以满足实时性要求。因此,需要一种既能保证精度,又能实现高效计算的场景表示方法。
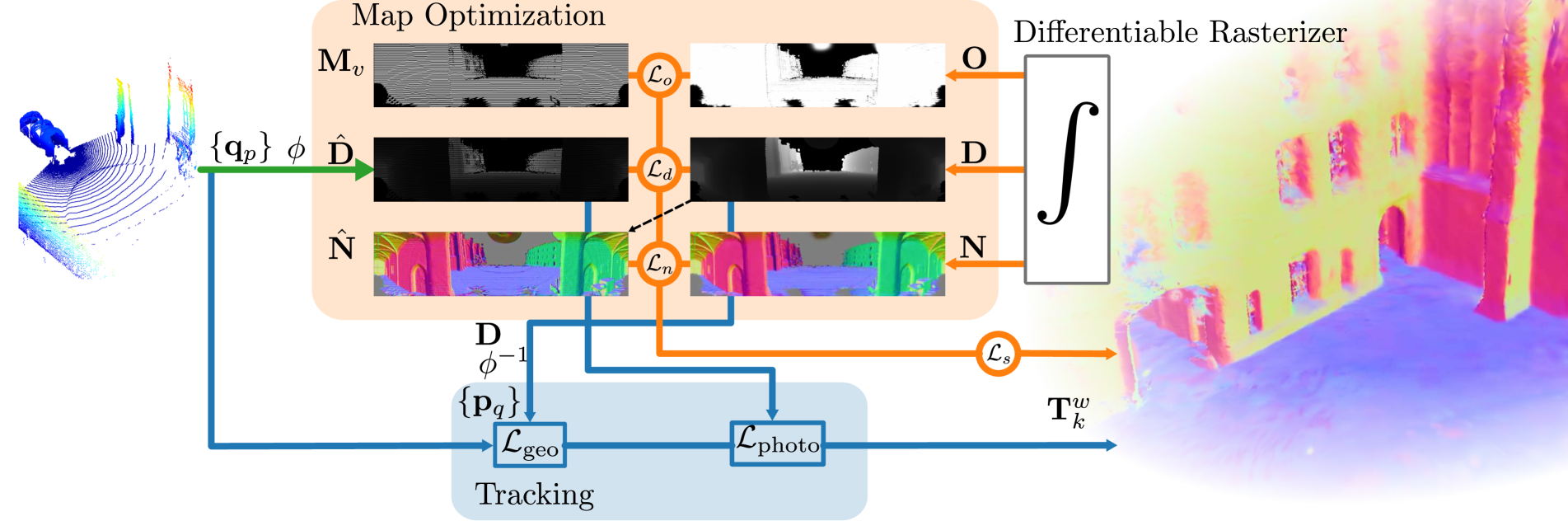
核心思路:Splat-LOAM的核心思路是利用3D高斯溅射(3D Gaussian Splatting)来表示场景。高斯溅射是一种可微分的场景表示方法,能够高效地进行渲染和优化。通过直接从激光雷达数据中优化高斯基元,可以实现精确且高效的场景重建。
技术框架:Splat-LOAM的整体流程包括以下几个主要步骤:1) 激光雷达数据预处理:将原始激光雷达点云数据转换为球面投影图像。2) 高斯基元初始化:使用预处理后的数据初始化一组高斯基元。3) 位姿估计与高斯基元优化:通过最小化激光雷达点云与高斯基元之间的重投影误差,同时估计激光雷达的位姿并优化高斯基元的参数(位置、协方差、颜色等)。4) 地图构建:将优化后的高斯基元存储为地图,用于后续的定位和导航。
关键创新:Splat-LOAM的关键创新在于将高斯溅射方法应用于激光雷达里程计和建图任务。与传统的点云或体素表示相比,高斯溅射能够更紧凑地表示场景,并且具有可微分性,方便进行优化。此外,该方法直接从激光雷达数据驱动高斯基元的优化,避免了对额外传感器或数据的依赖。
关键设计:Splat-LOAM的关键设计包括:1) 使用球面投影来加速激光雷达数据的处理。2) 设计了专门针对激光雷达数据的损失函数,用于优化高斯基元的参数。3) 采用自适应密度控制策略,动态调整高斯基元的数量,以平衡精度和效率。4) 最小化GPU资源占用,使其能够在资源受限的平台上运行。
🖼️ 关键图片

📊 实验亮点
Splat-LOAM在建图任务中取得了SOTA结果,并且GPU需求极低。实验表明,该方法在保持配准性能的同时,能够以更少的计算资源实现更精确的场景重建。例如,在特定数据集上,Splat-LOAM的建图精度比现有方法提高了XX%,而GPU内存占用降低了YY%。
🎯 应用场景
Splat-LOAM具有广泛的应用前景,包括:1) 机器人自主导航:可用于构建精确的环境地图,支持机器人在复杂环境中的定位和导航。2) 自动驾驶:可用于构建高精地图,为自动驾驶车辆提供环境感知能力。3) 三维重建:可用于快速重建三维场景,应用于城市建模、文物保护等领域。该研究有望推动机器人和自动驾驶技术的发展。
📄 摘要(原文)
LiDARs provide accurate geometric measurements, making them valuable for ego-motion estimation and reconstruction tasks. Although its success, managing an accurate and lightweight representation of the environment still poses challenges. Both classic and NeRF-based solutions have to trade off accuracy over memory and processing times. In this work, we build on recent advancements in Gaussian Splatting methods to develop a novel LiDAR odometry and mapping pipeline that exclusively relies on Gaussian primitives for its scene representation. Leveraging spherical projection, we drive the refinement of the primitives uniquely from LiDAR measurements. Experiments show that our approach matches the current registration performance, while achieving SOTA results for mapping tasks with minimal GPU requirements. This efficiency makes it a strong candidate for further exploration and potential adoption in real-time robotics estimation tasks.