APEX-MR: Multi-Robot Asynchronous Planning and Execution for Cooperative Assembly
作者: Philip Huang, Ruixuan Liu, Shobhit Aggarwal, Changliu Liu, Jiaoyang Li
分类: cs.RO
发布日期: 2025-03-20 (更新: 2025-08-07)
备注: 17 pages, 11 figures. To appear in the proceedings of RSS 2025
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
APEX-MR:用于协同装配的多机器人异步规划与执行框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多机器人系统 协同装配 异步规划 运动规划 冲突解决 机器人控制 乐高装配
📋 核心要点
- 多机器人协同装配面临系统不确定性、任务效率、算法可扩展性和安全等挑战。
- APEX-MR通过异步规划与执行,后处理任务和运动规划,实现不确定性下的鲁棒协同。
- 实验表明,APEX-MR在乐高装配任务中,相比顺序和同步规划分别平均提升48%和36%。
📝 摘要(中文)
本文研究多机器人协同问题,提出了一种异步规划与执行框架APEX-MR,旨在安全高效地协调多个机器人完成协同装配任务,例如乐高积木拼装。APEX-MR提供了一种系统性的方法来后处理多机器人任务和运动规划,从而在不确定性下实现鲁棒的异步执行。实验结果表明,与顺序规划相比,APEX-MR能够显著加快长时程乐高装配任务的执行时间,平均提升48%;与同步规划相比,平均提升36%。为了进一步验证性能,我们将APEX-MR部署在双臂机器人系统中,进行真实的乐高积木拼装。据我们所知,这是第一个能够使用商业乐高积木执行定制乐高装配的机器人系统。实验结果表明,配备APEX-MR的双臂系统能够安全地协调机器人运动,高效地协作,并构建复杂的乐高结构。
🔬 方法详解
问题定义:多机器人协同装配旨在利用多个机器人扩展工作空间、提高任务效率,并完成单机器人难以实现的任务。然而,由于系统不确定性、任务效率、算法可扩展性和安全问题,协调多个机器人的任务和运动仍然具有挑战性。现有方法,如顺序规划和同步规划,难以在不确定性下保证效率和鲁棒性。
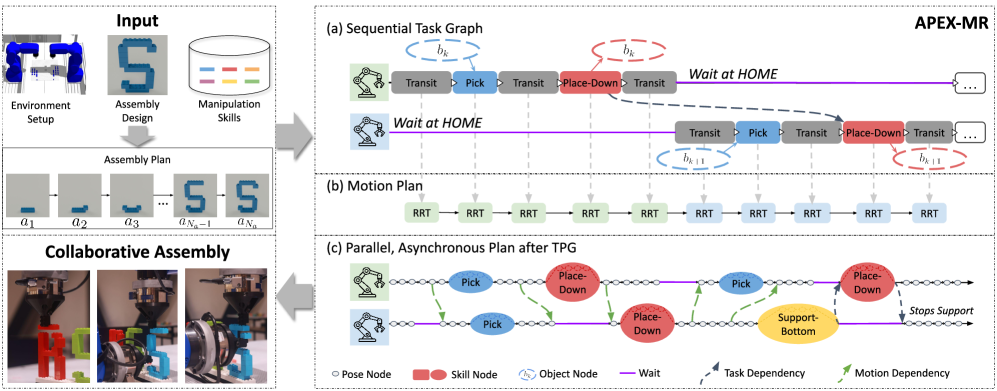
核心思路:APEX-MR的核心思路是采用异步规划与执行策略,允许机器人独立地规划和执行其任务,并通过后处理机制来处理潜在的冲突和不确定性。这种异步方式能够提高整体的任务效率,并允许系统在面对局部故障或延迟时保持一定的鲁棒性。
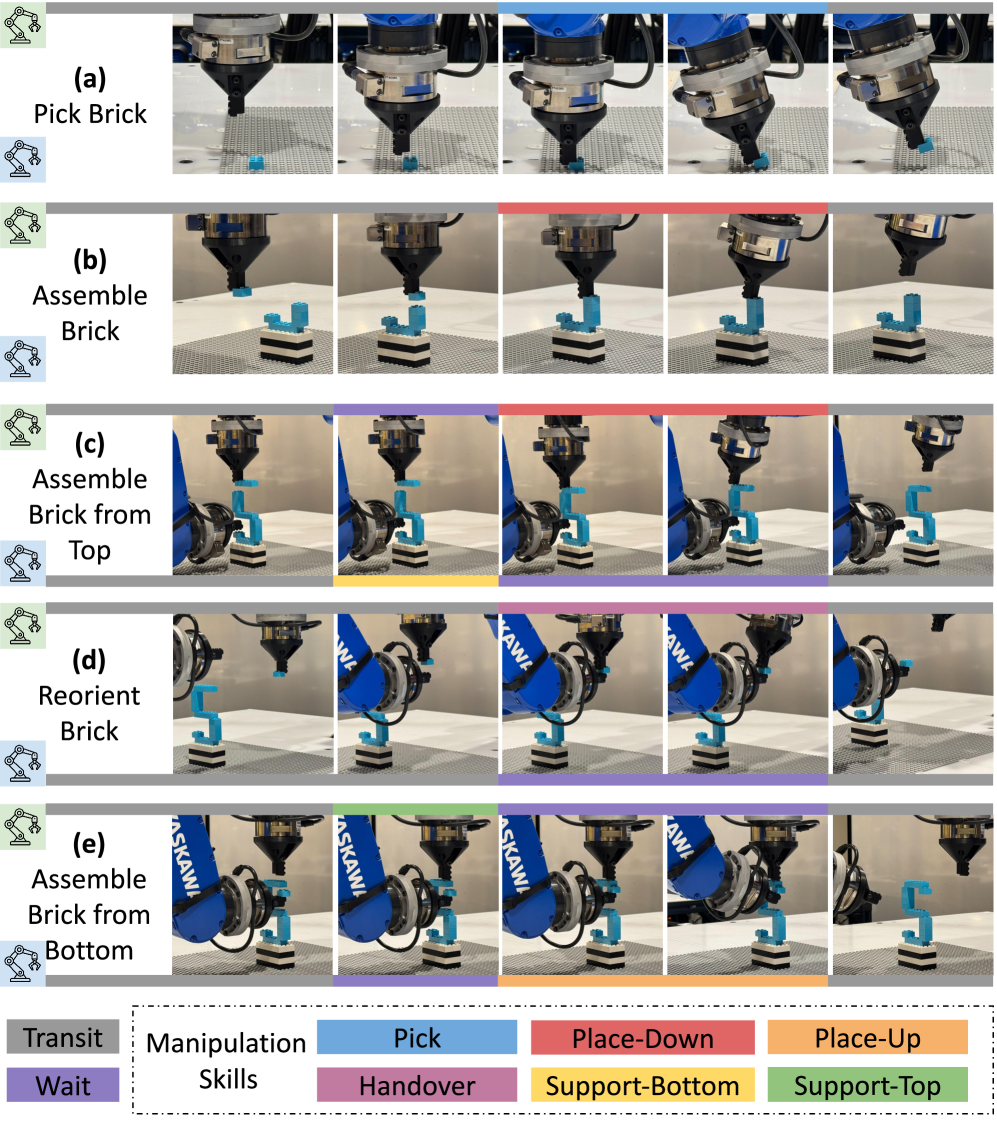
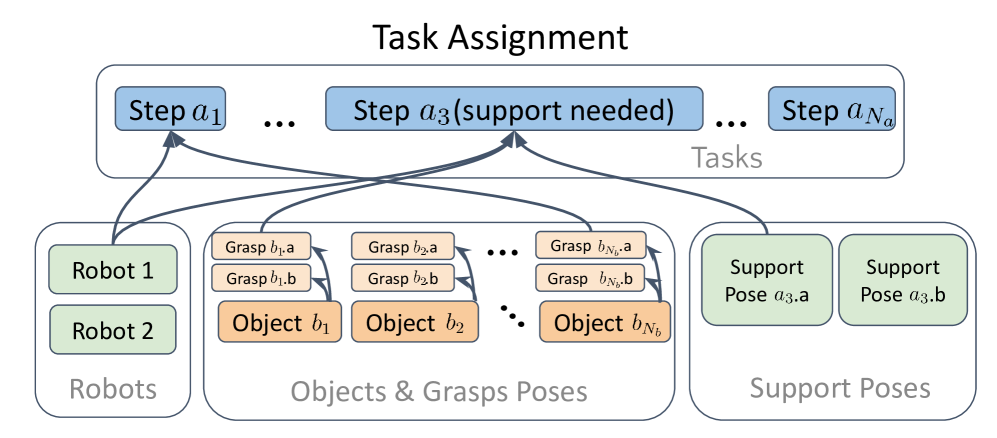
技术框架:APEX-MR框架包含以下主要模块:1) 任务分解与分配:将整体装配任务分解为多个子任务,并分配给不同的机器人。2) 运动规划:每个机器人独立地规划其子任务的运动轨迹。3) 冲突检测与解决:检测机器人之间的潜在冲突,并生成避障轨迹或调整任务执行顺序。4) 异步执行:机器人根据规划的轨迹异步执行任务,并通过反馈机制进行实时调整。5) 后处理:对任务和运动计划进行后处理,以提高鲁棒性。
关键创新:APEX-MR的关键创新在于其异步规划与执行策略以及后处理机制。传统的同步规划方法需要所有机器人同步等待,效率较低。APEX-MR允许机器人异步执行,并通过后处理来解决潜在的冲突和不确定性,从而提高了整体的任务效率和鲁棒性。
关键设计:APEX-MR的关键设计包括:1) 基于优先级的冲突解决策略:为每个机器人分配优先级,并根据优先级解决冲突。2) 基于模型的预测:利用机器人和环境的模型来预测潜在的冲突和不确定性。3) 动态调整的任务分配:根据机器人的状态和环境的变化,动态调整任务分配。
🖼️ 关键图片
📊 实验亮点
实验结果表明,APEX-MR在乐高装配任务中表现出色。与顺序规划相比,APEX-MR能够显著加快长时程乐高装配任务的执行时间,平均提升48%;与同步规划相比,平均提升36%。在双臂机器人系统上的真实乐高积木拼装实验进一步验证了APEX-MR的有效性和鲁棒性。
🎯 应用场景
APEX-MR可应用于各种多机器人协同装配场景,例如汽车制造、电子产品组装、航空航天等。该框架能够提高装配效率、降低成本,并实现更复杂的装配任务。此外,APEX-MR的异步执行策略也使其适用于动态和不确定的环境,例如物流仓储和灾难救援。
📄 摘要(原文)
Compared to a single-robot workstation, a multi-robot system offers several advantages: 1) it expands the system's workspace, 2) improves task efficiency, and, more importantly, 3) enables robots to achieve significantly more complex and dexterous tasks, such as cooperative assembly. However, coordinating the tasks and motions of multiple robots is challenging due to issues, e.g., system uncertainty, task efficiency, algorithm scalability, and safety concerns. To address these challenges, this paper studies multi-robot coordination and proposes APEX-MR, an asynchronous planning and execution framework designed to safely and efficiently coordinate multiple robots to achieve cooperative assembly, e.g., LEGO assembly. In particular, APEX-MR provides a systematic approach to post-process multi-robot tasks and motion plans to enable robust asynchronous execution under uncertainty. Experimental results demonstrate that APEX-MR can significantly speed up the execution time of many long-horizon LEGO assembly tasks by 48% compared to sequential planning and 36% compared to synchronous planning on average. To further demonstrate performance, we deploy APEX-MR in a dual-arm system to perform physical LEGO assembly. To our knowledge, this is the first robotic system capable of performing customized LEGO assembly using commercial LEGO bricks. The experimental results demonstrate that the dual-arm system, with APEX-MR, can safely coordinate robot motions, efficiently collaborate, and construct complex LEGO structures. Our project website is available at https://intelligent-control-lab.github.io/APEX-MR/.