Does the Appearance of Autonomous Conversational Robots Affect User Spoken Behaviors in Real-World Conference Interactions?
作者: Zi Haur Pang, Yahui Fu, Divesh Lala, Mikey Elmers, Koji Inoue, Tatsuya Kawahara
分类: cs.RO, cs.CL, cs.HC
发布日期: 2025-03-17
备注: This paper has been accepted as Late-Breaking Work at CHI Conference on Human Factors in Computing Systems (CHI EA '25)
💡 一句话要点
研究表明:类人机器人外形影响用户在会议互动中的口语行为
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人机交互 机器人外形 口语行为 语言特征 沟通适应理论
📋 核心要点
- 现有研究缺乏对机器人外形如何影响真实场景下用户口语行为的深入分析。
- 该研究通过比较类人机器人和非类人机器人,分析用户在互动中的口语特征差异。
- 实验结果表明,类人机器人能促使用户产生更流畅、更复杂的口语表达。
📝 摘要(中文)
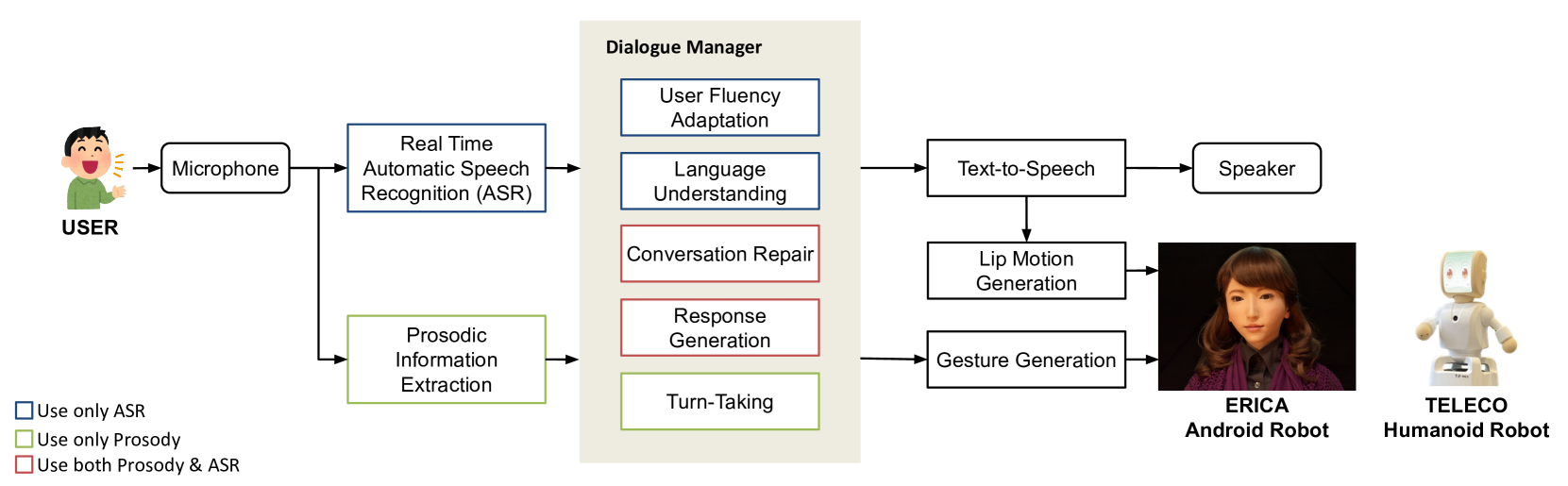
本研究探讨了机器人外形对真实互动场景中用户口语行为的影响。通过比较类人机器人ERICA和非完全拟人机器人TELECO,分析了SIGDIAL 2024会议中42名参与者的数据,提取了诸如口语失误和句法复杂度等语言特征。结果表明,中等程度的影响效应显示,与ERICA互动时,参与者产生的口语失误更少,句法结构更复杂。进一步分析,包括训练朴素贝叶斯分类模型(F1-score达71.60%)和特征重要性分析,突显了口语失误和句法复杂度在与不同类人程度机器人互动中的重要作用。基于认知负荷和沟通适应理论框架,我们得出结论:设计能够引发更结构化和流畅用户语音的机器人,可以增强其与人类的沟通一致性。
🔬 方法详解
问题定义:现有方法缺乏对机器人外形与用户口语行为之间关系的量化分析,尤其是在真实的互动场景中。之前的研究可能更多关注于任务完成度或用户满意度,而忽略了用户口语表达的细微变化。本研究旨在填补这一空白,探究不同外形的机器人如何影响用户的口语流畅性和句法复杂度。
核心思路:本研究的核心思路是通过对比实验,观察用户与不同外形机器人(类人与非类人)互动时的口语行为差异。假设类人机器人会激发用户更正式、更流畅的语言表达,而较少拟人的机器人则可能导致用户使用更随意、更简单的语言。这种假设基于认知负荷理论和沟通适应理论,认为用户会根据互动对象的特征调整自己的沟通方式。
技术框架:研究的技术框架主要包括以下几个步骤:1) 在SIGDIAL 2024会议现场招募参与者;2) 让参与者分别与类人机器人ERICA和非类人机器人TELECO进行互动;3) 录制互动过程中的语音数据,并转录为文本;4) 从文本中提取语言特征,包括口语失误(如重复、犹豫)和句法复杂度(如句子长度、从句数量);5) 使用统计方法(如t检验)分析不同机器人外形下用户口语特征的差异;6) 训练分类模型(如朴素贝叶斯)以区分用户与不同机器人互动时的口语风格;7) 进行特征重要性分析,确定哪些语言特征对区分不同互动场景贡献最大。
关键创新:本研究的关键创新在于:1) 在真实的会议互动场景中进行实验,提高了研究的生态有效性;2) 同时考虑了口语失误和句法复杂度等多种语言特征,更全面地分析了用户口语行为;3) 使用机器学习方法进行分类和特征重要性分析,更深入地理解了机器人外形与用户口语行为之间的关系。
关键设计:研究的关键设计包括:1) 选择具有代表性的类人机器人ERICA和非类人机器人TELECO作为实验对象;2) 控制实验环境,确保参与者在相似的条件下与机器人互动;3) 使用标准的语音转录和语言特征提取工具,保证数据的准确性和可比性;4) 使用朴素贝叶斯分类器,并采用F1-score作为评价指标,评估分类模型的性能;5) 进行特征重要性分析时,采用信息增益等方法,确定哪些语言特征对分类结果影响最大。
🖼️ 关键图片


📊 实验亮点
实验结果表明,与非类人机器人TELECO相比,用户在与类人机器人ERICA互动时,口语失误更少,句法结构更复杂。朴素贝叶斯分类模型在区分用户与不同机器人互动时的口语风格方面取得了较好的性能,F1-score达到了71.60%。特征重要性分析表明,口语失误和句法复杂度是区分不同互动场景的关键特征。
🎯 应用场景
该研究成果可应用于人机交互系统的设计,尤其是在需要高质量对话的场景中,例如客户服务、教育培训和医疗保健。通过设计具有适当外形的机器人,可以引导用户产生更清晰、更流畅的口语表达,从而提高沟通效率和用户满意度。未来的研究可以进一步探索不同文化背景下机器人外形对用户口语行为的影响。
📄 摘要(原文)
We investigate the impact of robot appearance on users' spoken behavior during real-world interactions by comparing a human-like android, ERICA, with a less anthropomorphic humanoid, TELECO. Analyzing data from 42 participants at SIGDIAL 2024, we extracted linguistic features such as disfluencies and syntactic complexity from conversation transcripts. The results showed moderate effect sizes, suggesting that participants produced fewer disfluencies and employed more complex syntax when interacting with ERICA. Further analysis involving training classification models like Naïve Bayes, which achieved an F1-score of 71.60\%, and conducting feature importance analysis, highlighted the significant role of disfluencies and syntactic complexity in interactions with robots of varying human-like appearances. Discussing these findings within the frameworks of cognitive load and Communication Accommodation Theory, we conclude that designing robots to elicit more structured and fluent user speech can enhance their communicative alignment with humans.