LIVEPOINT: Fully Decentralized, Safe, Deadlock-Free Multi-Robot Control in Cluttered Environments with High-Dimensional Inputs
作者: Jeffrey Chen, Rohan Chandra
分类: cs.RO, cs.MA, eess.SY
发布日期: 2025-03-17
💡 一句话要点
LIVEPOINT:一种完全去中心化、安全、无死锁的多机器人控制框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多机器人系统 去中心化控制 控制屏障函数 点云 安全导航 死锁避免 机器人导航
📋 核心要点
- 现有方法依赖精确状态测量以保证多机器人安全和活性,但难以从车载传感器直接获取。
- LIVEPOINT通过在点云上构建通用控制屏障函数,实现去中心化安全导航和死锁避免。
- 实验表明,LIVEPOINT在复杂场景中实现零碰撞和死锁,成功率100%,且运动更平滑。
📝 摘要(中文)
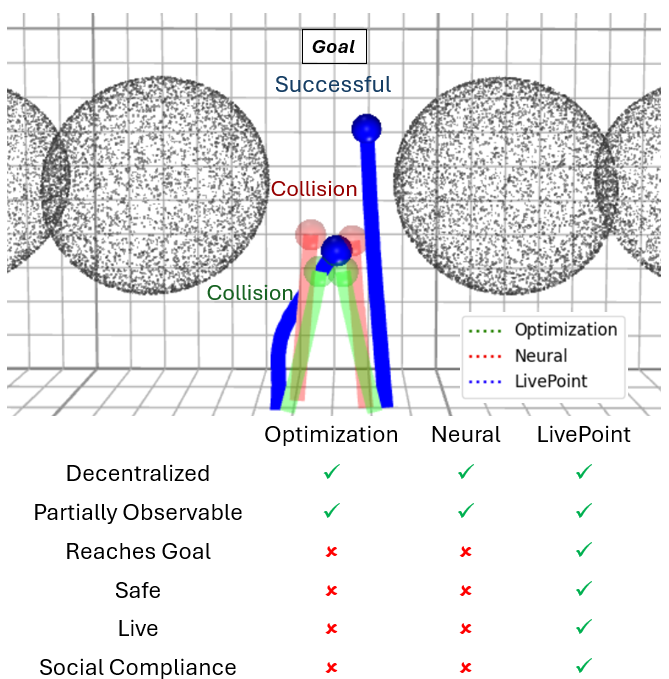
在动态、拥挤环境中实现完全去中心化、安全且无死锁的多机器人导航是机器人领域的一项关键挑战。现有方法通常需要精确的状态测量,以便通过控制屏障函数(CBFs)等方式来确保安全性和活性,但这很难直接从激光雷达和相机等车载传感器获得。本文提出了LIVEPOINT,一种去中心化的控制框架,它在点云上综合了通用CBFs,从而能够在动态、拥挤环境中实现安全、无死锁的实时多机器人导航。此外,LIVEPOINT通过基于一种新颖的对称交互度量动态调整智能体的速度,确保了最小侵入性的死锁避免行为。我们在模拟实验中验证了该方法在高度受限的多机器人场景(如门口和十字路口)中的有效性。结果表明,与基于优化的基线方法(如MPC和ORCA)以及神经方法(如MPNet)相比,LIVEPOINT在具有挑战性的环境中实现了零碰撞或死锁以及100%的成功率。尽管优先考虑安全性和活性,LIVEPOINT在门口环境中比基线方法平滑35%,并在受限环境中保持了敏捷性,同时仍然安全且无死锁。
🔬 方法详解
问题定义:论文旨在解决动态、拥挤环境中多机器人安全、去中心化导航的问题。现有方法,如基于控制屏障函数(CBFs)的方法,通常需要精确的状态测量,这在实际应用中很难通过车载传感器直接获得。此外,死锁问题也是一个挑战,尤其是在狭窄或复杂的环境中。
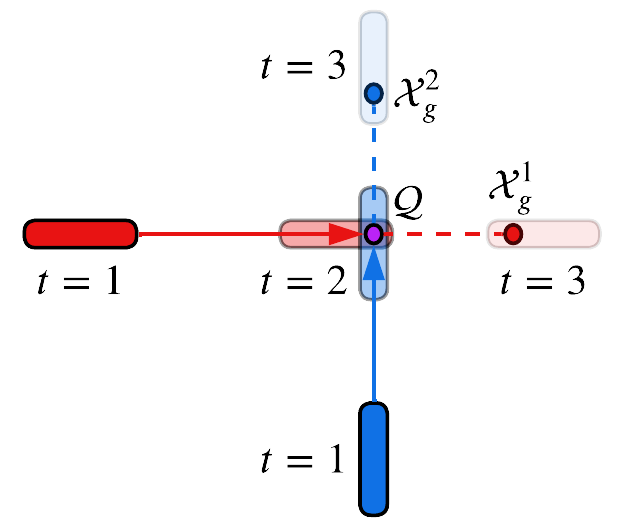
核心思路:LIVEPOINT的核心思路是利用点云数据构建通用控制屏障函数(CBFs),从而实现安全、无死锁的导航。通过在点云上定义CBFs,该方法避免了对精确状态测量的依赖,使其更适用于实际应用。此外,该方法还引入了一种对称交互度量,用于动态调整智能体的速度,从而避免死锁。
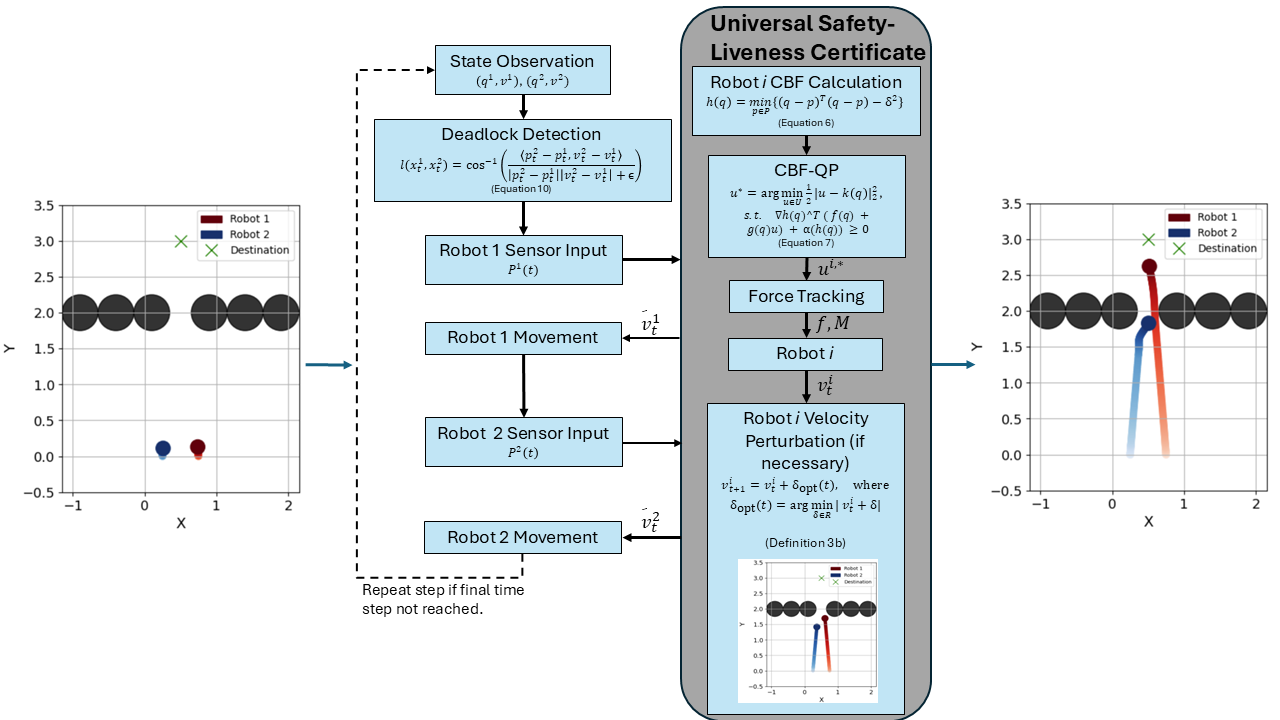
技术框架:LIVEPOINT的整体框架包含以下几个主要步骤:1) 从车载传感器(如激光雷达)获取点云数据;2) 基于点云数据构建通用控制屏障函数(CBFs);3) 使用CBFs设计控制策略,确保安全性和活性;4) 使用对称交互度量动态调整智能体的速度,避免死锁。整个框架是去中心化的,每个机器人独立运行,无需全局信息。
关键创新:LIVEPOINT最重要的技术创新点在于其通用控制屏障函数(CBFs)的构建方法,该方法直接在点云上定义CBFs,避免了对精确状态测量的依赖。此外,对称交互度量的引入也是一个创新,它能够有效地避免死锁,同时保持机器人的敏捷性。
关键设计:LIVEPOINT的关键设计包括:1) 通用CBFs的定义方式,需要仔细选择合适的函数形式和参数,以确保安全性和活性;2) 对称交互度量的计算方法,需要考虑机器人之间的相对位置和速度,以及环境的约束;3) 速度调整策略,需要在避免死锁的同时,尽量保持机器人的运动效率。
🖼️ 关键图片
📊 实验亮点
LIVEPOINT在模拟实验中表现出色,在门口和十字路口等复杂环境中实现了零碰撞和死锁,成功率达到100%。与基于优化的方法(如MPC和ORCA)以及神经方法(如MPNet)相比,LIVEPOINT在这些环境中表现出显著的优势。此外,LIVEPOINT在门口环境中比基线方法平滑35%,表明其在保证安全性的同时,也具有良好的运动性能。
🎯 应用场景
LIVEPOINT适用于各种多机器人协作场景,例如仓库自动化、物流配送、灾难救援和自动驾驶等。该方法能够提高多机器人在复杂环境中的导航安全性、效率和可靠性,降低人工干预的需求,具有重要的实际应用价值和广阔的市场前景。
📄 摘要(原文)
Fully decentralized, safe, and deadlock-free multi-robot navigation in dynamic, cluttered environments is a critical challenge in robotics. Current methods require exact state measurements in order to enforce safety and liveness e.g. via control barrier functions (CBFs), which is challenging to achieve directly from onboard sensors like lidars and cameras. This work introduces LIVEPOINT, a decentralized control framework that synthesizes universal CBFs over point clouds to enable safe, deadlock-free real-time multi-robot navigation in dynamic, cluttered environments. Further, LIVEPOINT ensures minimally invasive deadlock avoidance behavior by dynamically adjusting agents' speeds based on a novel symmetric interaction metric. We validate our approach in simulation experiments across highly constrained multi-robot scenarios like doorways and intersections. Results demonstrate that LIVEPOINT achieves zero collisions or deadlocks and a 100% success rate in challenging settings compared to optimization-based baselines such as MPC and ORCA and neural methods such as MPNet, which fail in such environments. Despite prioritizing safety and liveness, LIVEPOINT is 35% smoother than baselines in the doorway environment, and maintains agility in constrained environments while still being safe and deadlock-free.