Humanoids in Hospitals: A Technical Study of Humanoid Robot Surrogates for Dexterous Medical Interventions
作者: Soofiyan Atar, Xiao Liang, Calvin Joyce, Florian Richter, Wood Ricardo, Charles Goldberg, Preetham Suresh, Michael Yip
分类: cs.RO
发布日期: 2025-03-17 (更新: 2025-07-31)
备注: 8 pages
💡 一句话要点
提出基于宇树G1人形机器人的遥操作系统,探索其在医疗干预中的应用潜力
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人 遥操作 医疗干预 姿态跟踪 阻抗控制
📋 核心要点
- 人口老龄化和劳动力短缺导致医疗保健人员需求激增,现有医疗资源面临巨大压力。
- 开发基于宇树G1人形机器人的双臂遥操作系统,通过高精度姿态跟踪和阻抗控制实现医疗工具的精确操作。
- 实验验证了人形机器人在医疗评估和干预中的潜力,并在通气和超声引导任务中取得了有希望的定量结果。
📝 摘要(中文)
本文针对医疗保健人员日益增长的需求,探索人形机器人在医疗程序中辅助操作的可行性。研究开发了一套用于宇树G1人形机器人的双臂遥操作系统,集成了高保真姿态跟踪、自定义抓取配置和阻抗控制器,以安全、精确地操作医疗工具。该系统在七种不同的医疗程序中进行了评估,包括体格检查、紧急干预和精确穿刺任务。结果表明,人形机器人可以成功地复制人类医疗评估和干预的关键环节,在通气和超声引导任务中表现出良好的定量性能。然而,仍然存在挑战,包括需要高强度的操作中力输出的限制,以及影响临床准确性的传感器灵敏度问题。这项研究强调了人形机器人在医院环境中的潜力和当前局限性,并为未来机器人医疗集成研究奠定了基础。
🔬 方法详解
问题定义:论文旨在探索人形机器人在医疗干预中的可行性,解决医疗保健人员短缺的问题。现有方法主要依赖传统机器人或人工操作,人形机器人的灵活性和适应性尚未得到充分利用,尤其是在需要精细操作的医疗场景中。现有机器人往往缺乏足够的人形操作能力,而人工操作则面临人员短缺和疲劳等问题。
核心思路:论文的核心思路是利用人形机器人的类人形态和灵活性,通过遥操作的方式,让人形机器人能够执行各种医疗任务。通过高精度的姿态跟踪和阻抗控制,确保机器人操作的安全性和精确性。这种方法旨在结合人类的判断力和机器人的执行力,提高医疗效率和质量。
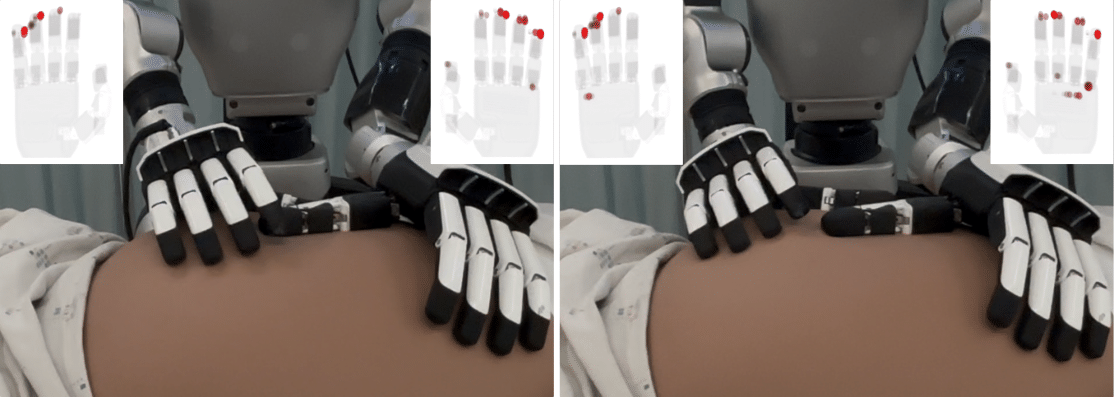
技术框架:该系统主要包括三个模块:操作员控制端、机器人执行端和控制系统。操作员控制端负责捕捉操作员的动作,并将其转化为机器人的控制指令。机器人执行端是宇树G1人形机器人,负责执行操作员的指令。控制系统则负责姿态跟踪、运动规划和阻抗控制,确保机器人能够安全、精确地完成任务。整体流程是操作员通过控制端输入指令,控制系统解析指令并控制机器人执行相应的动作。
关键创新:该研究的关键创新在于将高保真姿态跟踪、自定义抓取配置和阻抗控制集成到人形机器人的遥操作系统中,使其能够执行复杂的医疗任务。与传统的机器人遥操作系统相比,该系统更加注重机器人的灵活性和适应性,能够更好地模拟人类的操作。此外,该研究还针对医疗场景的特殊需求,设计了自定义的抓取配置,提高了机器人操作的效率和安全性。
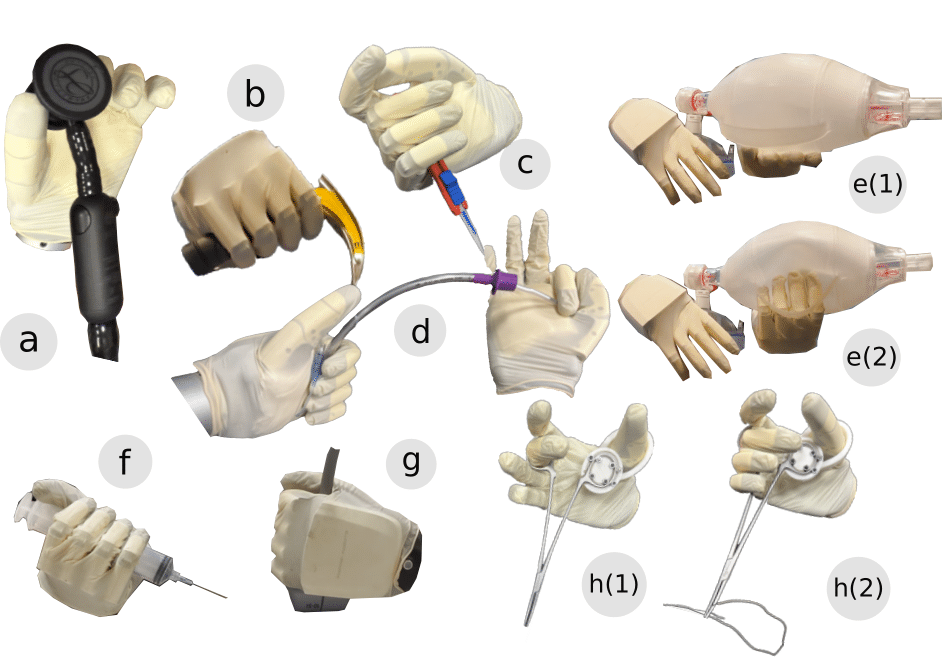
关键设计:在姿态跟踪方面,使用了高精度的动作捕捉设备,确保操作员的动作能够准确地传递到机器人。在阻抗控制方面,设计了一个基于力/力矩传感器的阻抗控制器,使机器人能够根据环境的反馈调整自身的力,避免对患者造成伤害。在抓取配置方面,针对不同的医疗工具,设计了不同的抓取方式,确保机器人能够稳定地抓取和操作工具。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该系统在通气和超声引导任务中表现出良好的定量性能。在通气任务中,机器人能够准确地控制通气量和频率,与人工操作相比,误差在可接受范围内。在超声引导任务中,机器人能够精确地定位目标,并引导穿刺针到达指定位置。此外,该系统还在其他医疗程序中进行了测试,证明了其在不同场景下的适应性。
🎯 应用场景
该研究成果可应用于远程医疗、手术辅助、康复护理等领域。人形机器人可以执行高危或重复性的医疗任务,减轻医护人员的负担,提高医疗效率。在疫情等特殊情况下,人形机器人还可以代替医护人员进行接触性操作,降低感染风险。未来,随着技术的不断发展,人形机器人有望在医疗领域发挥更大的作用。
📄 摘要(原文)
The increasing demand for healthcare workers, driven by aging populations and labor shortages, presents a significant challenge for hospitals. Humanoid robots have the potential to alleviate these pressures by leveraging their human-like dexterity and adaptability to assist in medical procedures. This work conducted an exploratory study on the feasibility of humanoid robots performing direct clinical tasks through teleoperation. A bimanual teleoperation system was developed for the Unitree G1 Humanoid Robot, integrating high-fidelity pose tracking, custom grasping configurations, and an impedance controller to safely and precisely manipulate medical tools. The system is evaluated in seven diverse medical procedures, including physical examinations, emergency interventions, and precision needle tasks. Our results demonstrate that humanoid robots can successfully replicate critical aspects of human medical assessments and interventions, with promising quantitative performance in ventilation and ultrasound-guided tasks. However, challenges remain, including limitations in force output for procedures requiring high strength and sensor sensitivity issues affecting clinical accuracy. This study highlights the potential and current limitations of humanoid robots in hospital settings and lays the groundwork for future research on robotic healthcare integration.