CDKFormer: Contextual Deviation Knowledge-Based Transformer for Long-Tail Trajectory Prediction
作者: Yuansheng Lian, Ke Zhang, Meng Li
分类: cs.RO, eess.SY
发布日期: 2025-03-16 (更新: 2025-12-09)
DOI: 10.1016/j.trc.2025.105430
💡 一句话要点
提出CDKFormer,利用上下文偏差知识增强Transformer,解决长尾轨迹预测问题。
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 轨迹预测 长尾学习 自动驾驶 Transformer 上下文融合
📋 核心要点
- 现有轨迹预测方法难以有效处理长尾场景,导致在罕见情况下预测效果差,增加了安全事故风险。
- CDKFormer通过融合场景上下文和偏差知识,利用Transformer架构,提升模型对长尾轨迹的预测能力。
- 实验表明,CDKFormer在长尾轨迹预测上显著优于现有方法,提高了自动驾驶在复杂环境中的可靠性。
📝 摘要(中文)
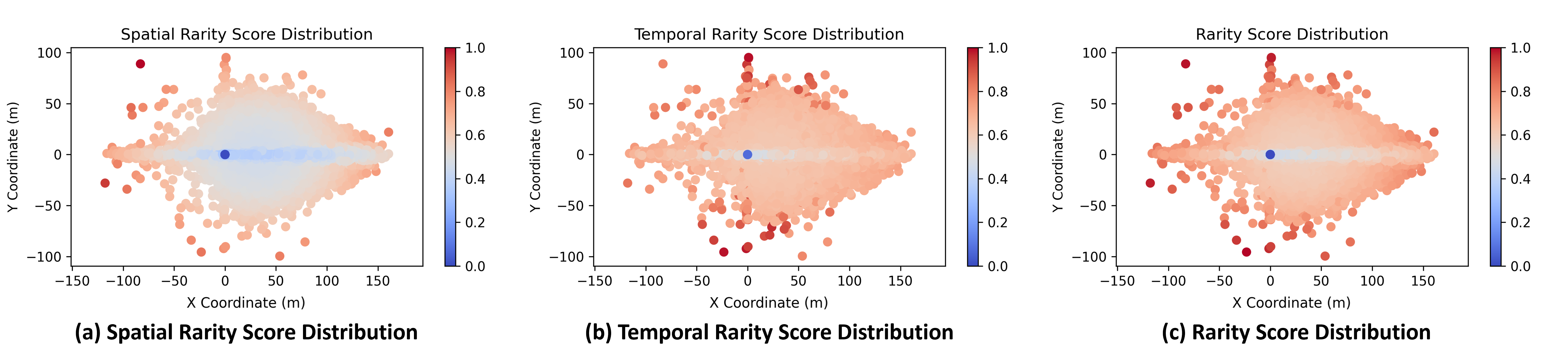
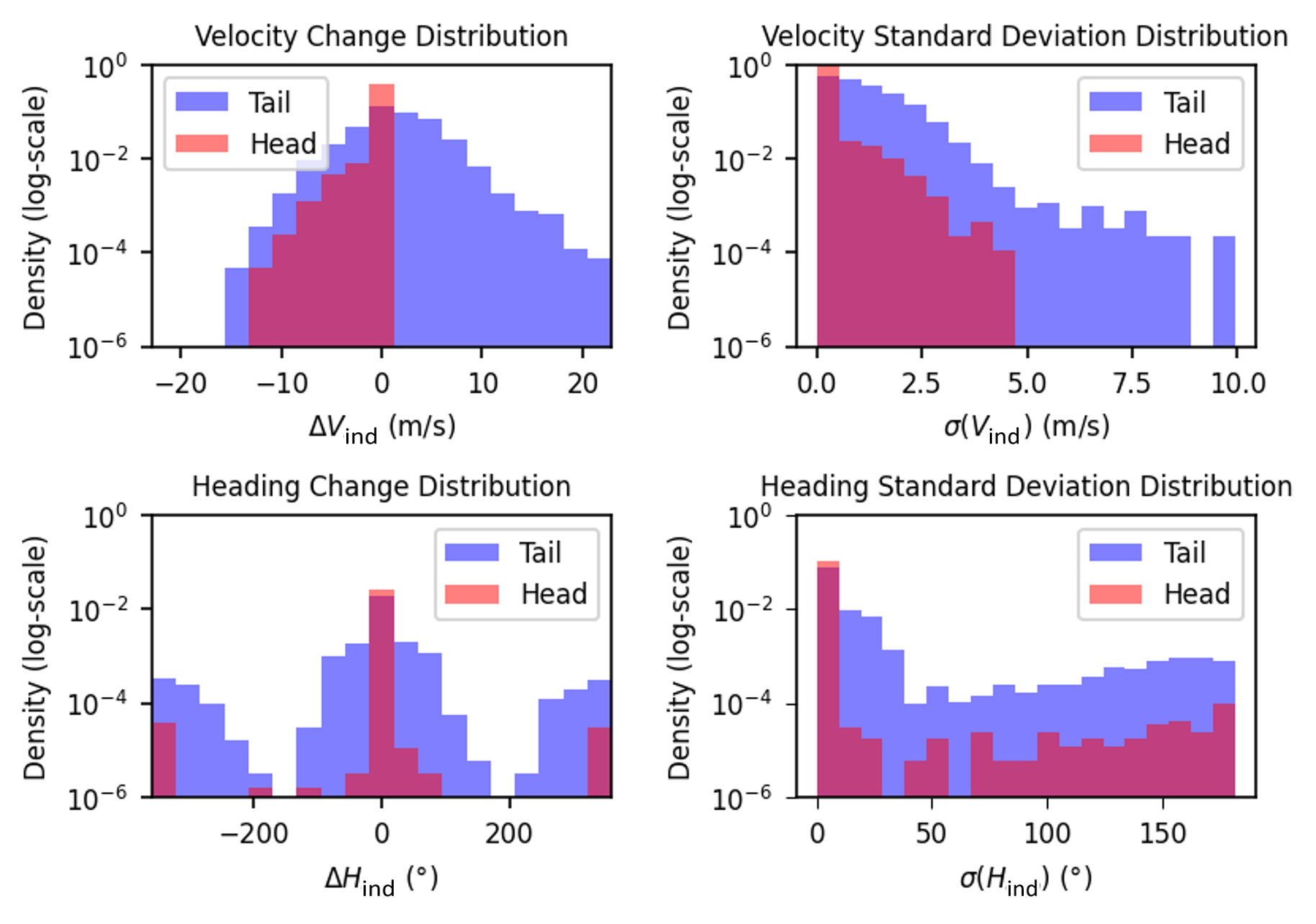
本文针对自动驾驶车辆在城市交通环境中轨迹预测的长尾问题,提出了一种基于上下文偏差知识的Transformer模型CDKFormer。该模型首先从个体运动和群体交互两个角度分析轨迹样本中的长尾特征,提取偏差特征以区分异常场景。CDKFormer集成了基于注意力机制的场景上下文融合模块,用于编码时空交互和道路拓扑结构。同时,提出了偏差特征融合模块,用于捕捉目标车辆状态的动态偏差。此外,引入了基于双查询的多流解码器,以顺序解码异构场景偏差特征并生成多模态轨迹预测。实验结果表明,CDKFormer在长尾轨迹预测方面取得了最先进的性能,显著提高了预测精度和鲁棒性,从而提升了自动驾驶车辆在复杂现实环境中的可靠性。
🔬 方法详解
问题定义:现有车辆轨迹预测方法主要关注整体性能的提升,但在长尾场景下的表现不佳,导致在罕见情况下预测精度低,增加了自动驾驶车辆的安全风险。论文旨在解决长尾轨迹预测问题,提高模型在异常场景下的预测准确性和鲁棒性。
核心思路:论文的核心思路是利用上下文偏差知识来增强Transformer模型。通过提取和融合场景上下文信息以及目标车辆的动态偏差特征,使模型能够更好地识别和预测异常轨迹。这种方法旨在弥补现有方法在处理长尾数据时的不足,提高模型对罕见事件的敏感性和适应性。
技术框架:CDKFormer的整体架构包括以下几个主要模块:1) 基于注意力机制的场景上下文融合模块,用于编码时空交互和道路拓扑结构;2) 偏差特征融合模块,用于捕捉目标车辆状态的动态偏差;3) 基于双查询的多流解码器,用于顺序解码异构场景偏差特征并生成多模态轨迹预测。整个流程首先提取场景上下文和偏差特征,然后通过Transformer模型进行融合和编码,最后通过解码器生成多条可能的未来轨迹。
关键创新:CDKFormer的关键创新在于引入了上下文偏差知识来指导轨迹预测。具体来说,通过提取和融合场景上下文信息以及目标车辆的动态偏差特征,使模型能够更好地识别和预测异常轨迹。此外,双查询多流解码器的设计也提高了模型生成多模态轨迹的能力。与现有方法相比,CDKFormer更注重对长尾数据的建模,从而提高了在罕见场景下的预测性能。
关键设计:论文中关键的设计包括:1) 偏差特征的提取方法,如何有效地量化目标车辆的动态偏差;2) 场景上下文融合模块中注意力机制的具体实现方式,如何有效地编码时空交互和道路拓扑结构;3) 双查询多流解码器的结构和参数设置,如何有效地解码异构场景偏差特征并生成多模态轨迹预测;4) 损失函数的设计,如何平衡整体性能和长尾性能。
🖼️ 关键图片

📊 实验亮点
实验结果表明,CDKFormer在Argoverse 2 motion forecasting dataset上取得了state-of-the-art的性能,尤其是在长尾轨迹预测方面,显著优于现有方法。具体的数据提升幅度未知,但论文强调了CDKFormer在提高预测精度和鲁棒性方面的优势,尤其是在罕见场景下。
🎯 应用场景
CDKFormer可应用于自动驾驶车辆的运动规划和决策控制,提高车辆在复杂城市交通环境中的安全性。通过更准确地预测周围车辆的未来轨迹,尤其是在异常场景下,自动驾驶系统可以做出更合理的避让和加速决策,从而减少交通事故的发生。此外,该技术也可应用于智能交通管理系统,用于预测交通拥堵和事故风险,提前进行交通疏导。
📄 摘要(原文)
Predicting the future movements of surrounding vehicles is essential for ensuring the safe operation and efficient navigation of autonomous vehicles (AVs) in urban traffic environments. Existing vehicle trajectory prediction methods primarily focus on improving overall performance, yet they struggle to address long-tail scenarios effectively. This limitation often leads to poor predictions in rare cases, significantly increasing the risk of safety incidents. Taking Argoverse 2 motion forecasting dataset as an example, we first investigate the long-tail characteristics in trajectory samples from two perspectives, individual motion and group interaction, and deriving deviation features to distinguish abnormal from regular scenarios. On this basis, we propose CDKFormer, a Contextual Deviation Knowledge-based Transformer model for long-tail trajectory prediction. CDKFormer integrates an attention-based scene context fusion module to encode spatiotemporal interaction and road topology. An additional deviation feature fusion module is proposed to capture the dynamic deviations in the target vehicle status. We further introduce a dual query-based decoder, supported by a multi-stream decoder block, to sequentially decode heterogeneous scene deviation features and generate multimodal trajectory predictions. Extensive experiments demonstrate that CDKFormer achieves state-of-the-art performance, significantly enhancing prediction accuracy and robustness for long-tailed trajectories compared to existing methods, thus advancing the reliability of AVs in complex real-world environments.