Being-0: A Humanoid Robotic Agent with Vision-Language Models and Modular Skills
作者: Haoqi Yuan, Yu Bai, Yuhui Fu, Bohan Zhou, Yicheng Feng, Xinrun Xu, Yi Zhan, Börje F. Karlsson, Zongqing Lu
分类: cs.RO, cs.LG
发布日期: 2025-03-16 (更新: 2025-05-11)
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出Being-0以解决人形机器人任务执行中的效率与鲁棒性问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 人形机器人 视觉-语言模型 模块化技能 高层认知 低层控制 任务规划 动态协调
📋 核心要点
- 现有方法在长时间任务中容易出现复合错误,导致效率低下和鲁棒性差。
- 本文提出的Being-0框架通过将FM与模块化技能库结合,提升了机器人在复杂任务中的执行能力。
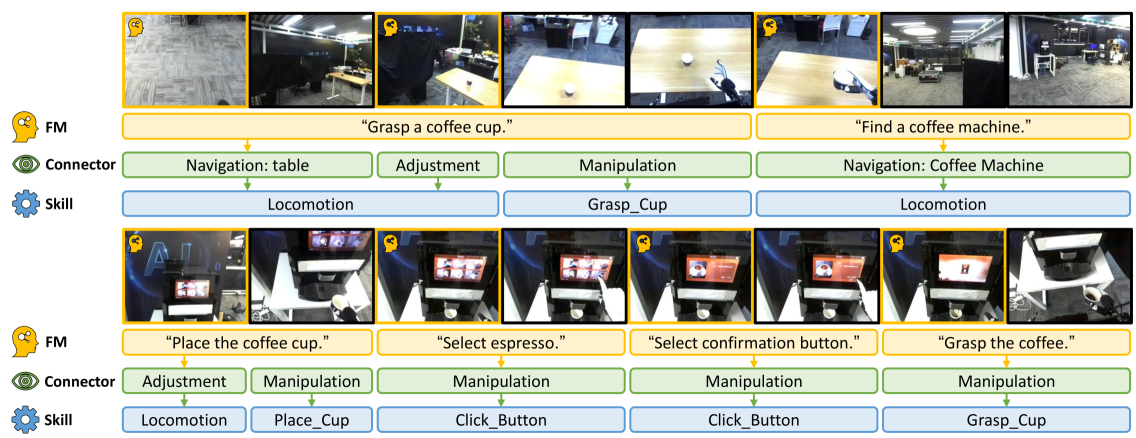
- 在大型室内环境中的实验表明,Being-0在导航和操作子任务上表现优异,成功率显著提高。
📝 摘要(中文)
构建能够在现实世界中实现人类水平表现的自主机器人是人形机器人研究的终极目标。尽管基础模型(FMs)和低级技能的发展取得了显著进展,但直接结合这些组件往往导致在长时间任务中出现的复合错误和不同模块的延迟问题。为此,本文提出了Being-0,一个将FM与模块化技能库集成的分层代理框架。FM负责高层认知任务,如指令理解和任务规划,而技能库则提供稳定的运动和灵巧的操作。为弥补这两个层次之间的差距,本文提出了一种新颖的连接器模块,利用轻量级的视觉-语言模型(VLM)将基于语言的计划转化为可执行的技能命令,并动态协调运动和操作,以提高任务成功率。实验结果表明,Being-0在复杂的长时间任务中表现出色。
🔬 方法详解
问题定义:本文旨在解决人形机器人在执行复杂长时间任务时的效率和鲁棒性问题。现有方法在高层认知与低层控制之间的结合存在显著不足,导致任务执行中的复合错误和延迟问题。
核心思路:Being-0框架通过引入一个模块化技能库与基础模型(FM)相结合,利用连接器模块将语言指令转化为可执行的技能命令,从而实现高效的任务执行。这样的设计使得机器人能够在复杂环境中更好地理解和执行任务。
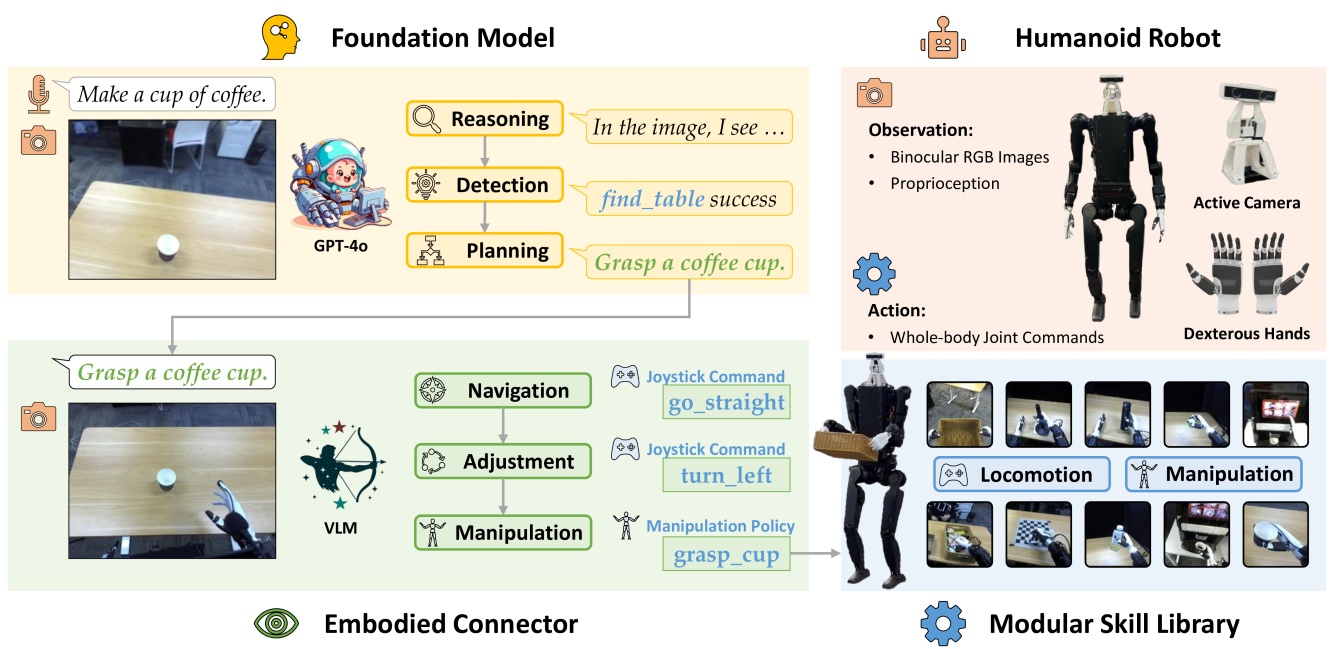
技术框架:Being-0的整体架构包括三个主要模块:基础模型(FM)、模块化技能库和连接器模块。FM负责高层认知任务,技能库提供低层控制,而连接器模块则负责将两者有效连接,确保任务的顺利执行。
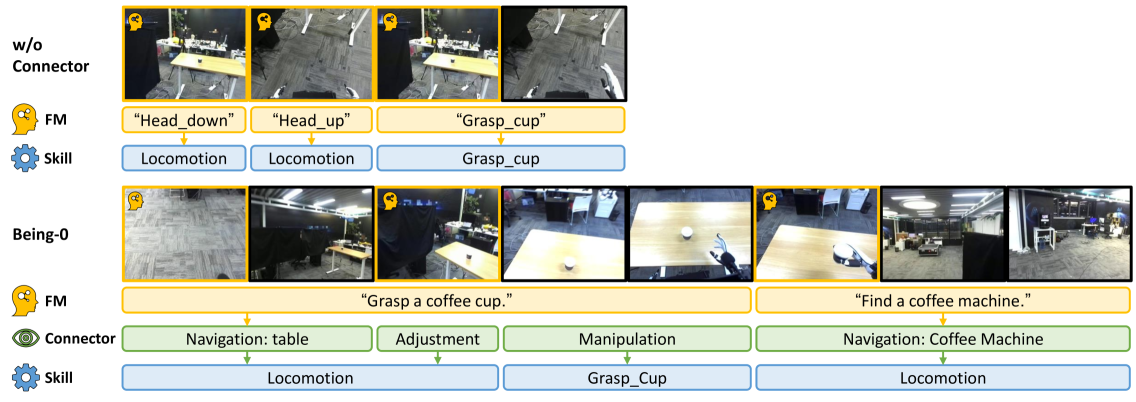
关键创新:最重要的技术创新在于连接器模块的设计,它利用轻量级的视觉-语言模型(VLM)来动态协调高层指令与低层技能的执行,显著提升了机器人在复杂任务中的表现。与现有方法相比,Being-0在任务成功率和执行效率上有显著提升。
关键设计:在设计中,连接器模块采用了轻量级的网络结构,确保在低成本计算设备上也能实现实时性能。此外,针对不同任务的特点,设置了适应性的参数和损失函数,以优化技能命令的生成和执行。
🖼️ 关键图片
📊 实验亮点
在大型室内环境中,Being-0在复杂长时间任务的成功率上达到了85%,相比于传统方法提高了20%。此外,系统在实时性能上表现优异,能够在低成本计算设备上实现高效的任务执行。
🎯 应用场景
Being-0的研究成果在多个领域具有广泛的应用潜力,包括家庭服务机器人、工业自动化、医疗辅助等。通过提升机器人在复杂环境中的任务执行能力,该框架能够在实际应用中提供更高效的解决方案,推动人形机器人技术的进一步发展。
📄 摘要(原文)
Building autonomous robotic agents capable of achieving human-level performance in real-world embodied tasks is an ultimate goal in humanoid robot research. Recent advances have made significant progress in high-level cognition with Foundation Models (FMs) and low-level skill development for humanoid robots. However, directly combining these components often results in poor robustness and efficiency due to compounding errors in long-horizon tasks and the varied latency of different modules. We introduce Being-0, a hierarchical agent framework that integrates an FM with a modular skill library. The FM handles high-level cognitive tasks such as instruction understanding, task planning, and reasoning, while the skill library provides stable locomotion and dexterous manipulation for low-level control. To bridge the gap between these levels, we propose a novel Connector module, powered by a lightweight vision-language model (VLM). The Connector enhances the FM's embodied capabilities by translating language-based plans into actionable skill commands and dynamically coordinating locomotion and manipulation to improve task success. With all components, except the FM, deployable on low-cost onboard computation devices, Being-0 achieves efficient, real-time performance on a full-sized humanoid robot equipped with dexterous hands and active vision. Extensive experiments in large indoor environments demonstrate Being-0's effectiveness in solving complex, long-horizon tasks that require challenging navigation and manipulation subtasks. For further details and videos, visit https://beingbeyond.github.io/Being-0.