From Abstraction to Reality: DARPA's Vision for Robust Sim-to-Real Autonomy
作者: Erfaun Noorani, Zachary Serlin, Ben Price, Alvaro Velasquez
分类: cs.RO, cs.AI, cs.LG, cs.MA, eess.SY
发布日期: 2025-03-14
💡 一句话要点
TIAMAT计划:通过抽象到现实的迁移,实现动态环境中鲁棒的自主性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: Sim-to-Real 领域自适应 自主系统 机器人 迁移学习
📋 核心要点
- 现有sim-to-real方法依赖高保真模拟,泛化性差,难以应对复杂动态的真实环境。
- TIAMAT计划强调直接在真实环境中进行自主堆栈的迁移和适应,利用低保真模拟。
- 通过从多个模拟环境中抽象学习,实现抽象到现实的迁移,提升真实环境适应性。
📝 摘要(中文)
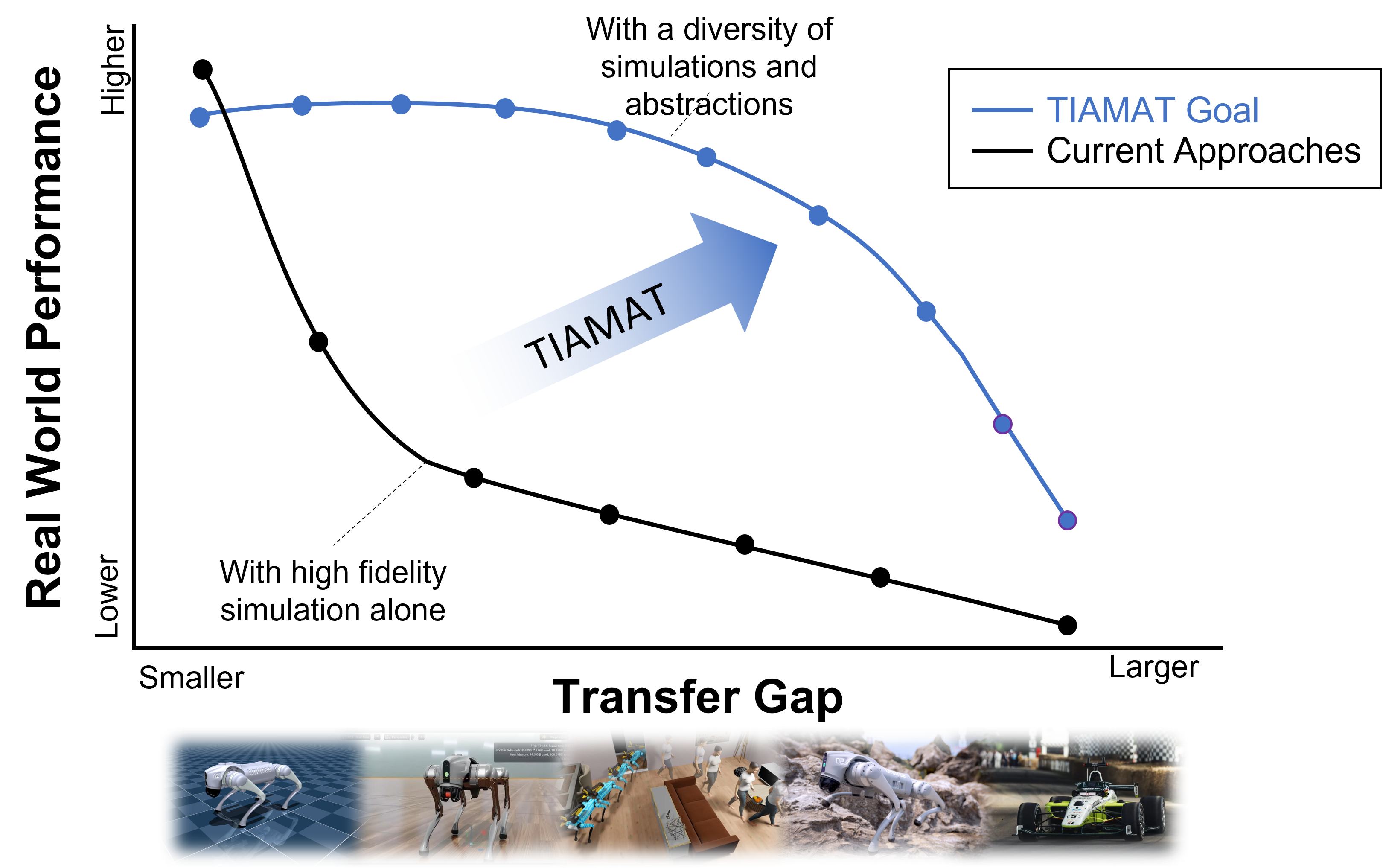
DARPA的“从不精确和抽象模型到自主技术转移”(TIAMAT)计划旨在解决自主技术在动态和复杂环境、目标和平台之间的快速和鲁棒转移问题。现有的模拟到现实(sim-to-real)转移方法通常依赖于高保真模拟,并且难以进行广泛的适应,尤其是在时间敏感的场景中。尽管许多方法在特定任务上表现出了惊人的性能,但由于模拟的固有局限性,大多数技术在面对不可预见的、复杂的和动态的现实世界场景时都显得不足。与当前旨在通过日益复杂的模拟以及通常假设较小sim-to-real差距的方法(如领域随机化、领域自适应、模仿学习、元学习、策略蒸馏和动态优化)来弥合模拟环境和现实世界之间差距的研究不同,TIAMAT采取了一种不同的方法,它强调通过利用各种低(er)保真度模拟来创建广泛有效的sim-to-real转移,从而将自主堆栈直接转移和适应到现实世界环境中。通过参考共享语义从多个模拟环境中抽象地学习,TIAMAT的方法旨在实现抽象到现实的转移,从而实现有效和快速的现实世界适应。此外,该计划还致力于通过解决将模拟行为转化为有效现实世界性能的固有挑战来改进整体自主管道。
🔬 方法详解
问题定义:现有sim-to-real方法过度依赖高保真模拟,导致泛化能力不足,难以应对真实世界中复杂、动态和不可预测的场景。这些方法通常假设模拟环境与真实环境之间存在较小的差距,因此在实际应用中表现不佳。现有方法在特定任务上表现良好,但在面对新的、未知的环境时,鲁棒性较差。
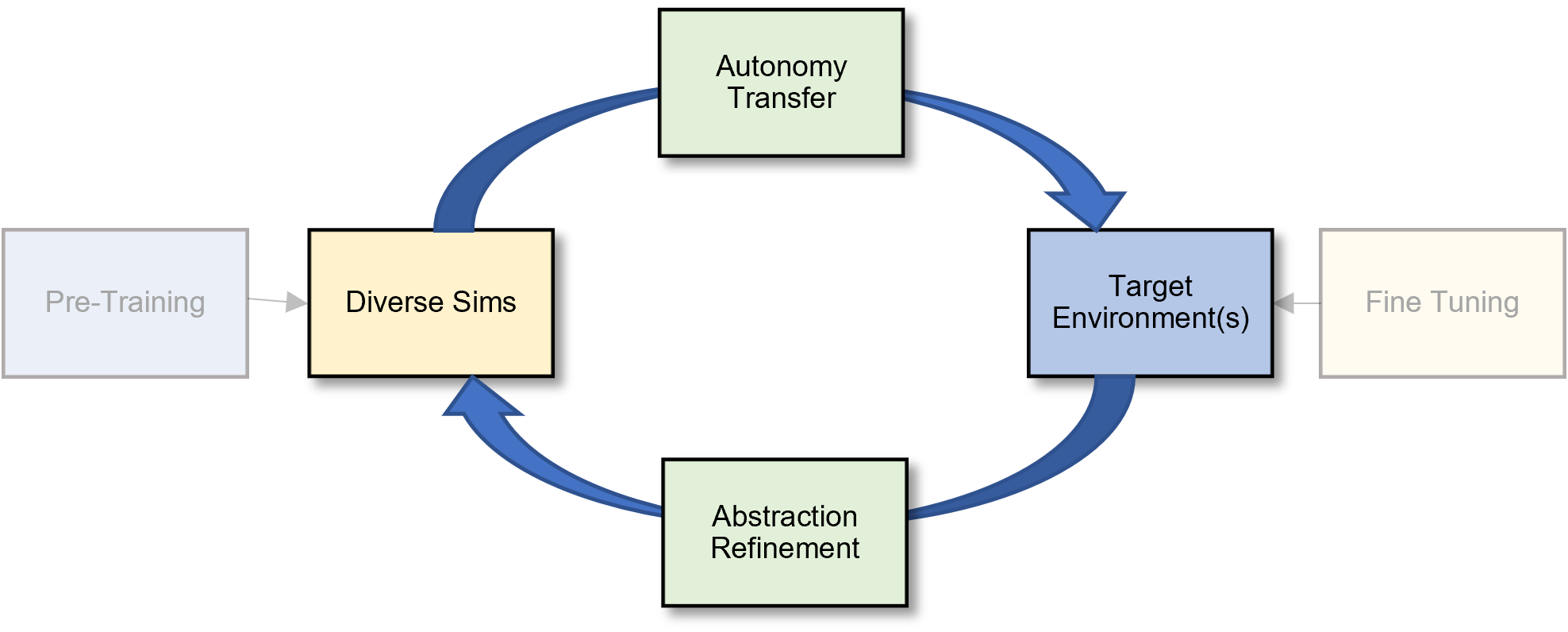
核心思路:TIAMAT计划的核心思路是通过抽象学习来实现sim-to-real的迁移。不同于以往依赖高保真模拟的方法,TIAMAT利用多个低保真模拟环境,并从中学习共享的语义信息。通过这种方式,模型可以学习到更加抽象和通用的知识,从而更好地适应真实世界。这种方法强调的是从抽象到现实的迁移,而不是简单地复制模拟环境。
技术框架:TIAMAT计划的技术框架包含多个阶段,首先是构建多个低保真模拟环境,这些环境在某些方面存在差异,但在语义上是相关的。然后,利用这些模拟环境进行训练,学习抽象的知识表示。接下来,将学习到的知识迁移到真实世界环境中,并进行微调和适应。整个框架强调的是知识的迁移和适应,而不是简单地复制模拟环境。具体模块包括:环境生成模块、抽象知识学习模块、迁移和适应模块。
关键创新:TIAMAT计划最重要的技术创新点在于其“抽象到现实”的迁移策略。与传统的sim-to-real方法不同,TIAMAT不依赖于高保真模拟,而是通过多个低保真模拟环境学习抽象的知识表示。这种方法可以更好地应对真实世界中的复杂性和不确定性,提高模型的泛化能力和鲁棒性。此外,TIAMAT还强调自主堆栈的直接迁移和适应,减少了对模拟环境的依赖。
关键设计:TIAMAT计划的关键设计包括:1) 低保真模拟环境的多样性,确保模型能够学习到更加通用的知识;2) 抽象知识表示的学习方法,例如使用对比学习或自监督学习来提取共享的语义信息;3) 迁移和适应策略,例如使用领域自适应或元学习来微调模型,使其更好地适应真实世界环境。具体的损失函数和网络结构未知,需要进一步的论文细节。
🖼️ 关键图片
📊 实验亮点
论文主要描述了DARPA的TIAMAT计划,目前没有提供具体的实验结果和性能数据。其亮点在于提出了“抽象到现实”的迁移策略,旨在解决现有sim-to-real方法泛化能力不足的问题。该计划强调利用低保真模拟环境学习抽象知识,并直接在真实环境中进行自主堆栈的迁移和适应。
🎯 应用场景
该研究成果可应用于机器人、自动驾驶、无人机等领域,尤其是在复杂、动态和不可预测的环境中。通过提高自主系统的鲁棒性和泛化能力,可以降低开发成本,加速技术落地。未来,该技术有望在灾害救援、物流运输、智能制造等领域发挥重要作用。
📄 摘要(原文)
The DARPA Transfer from Imprecise and Abstract Models to Autonomous Technologies (TIAMAT) program aims to address rapid and robust transfer of autonomy technologies across dynamic and complex environments, goals, and platforms. Existing methods for simulation-to-reality (sim-to-real) transfer often rely on high-fidelity simulations and struggle with broad adaptation, particularly in time-sensitive scenarios. Although many approaches have shown incredible performance at specific tasks, most techniques fall short when posed with unforeseen, complex, and dynamic real-world scenarios due to the inherent limitations of simulation. In contrast to current research that aims to bridge the gap between simulation environments and the real world through increasingly sophisticated simulations and a combination of methods typically assuming a small sim-to-real gap -- such as domain randomization, domain adaptation, imitation learning, meta-learning, policy distillation, and dynamic optimization -- TIAMAT takes a different approach by instead emphasizing transfer and adaptation of the autonomy stack directly to real-world environments by utilizing a breadth of low(er)-fidelity simulations to create broadly effective sim-to-real transfers. By abstractly learning from multiple simulation environments in reference to their shared semantics, TIAMAT's approaches aim to achieve abstract-to-real transfer for effective and rapid real-world adaptation. Furthermore, this program endeavors to improve the overall autonomy pipeline by addressing the inherent challenges in translating simulated behaviors into effective real-world performance.