Stratified Topological Autonomy for Long-Range Coordination (STALC)
作者: Cora A. Duggan, Adam Goertz, Adam Polevoy, Mark Gonzales, Kevin C. Wolfe, Bradley Woosley, John G. Rogers, Joseph Moore
分类: cs.RO, eess.SY
发布日期: 2025-03-13 (更新: 2025-09-23)
备注: This work has been submitted to the IEEE for possible publication
💡 一句话要点
提出STALC:一种用于长程协同的多机器人分层拓扑自主规划方法
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 多机器人协同 拓扑规划 混合整数规划 分层控制 自主导航 长程规划 机器人侦察
📋 核心要点
- 现有方法难以在复杂环境中高效地进行多机器人协同规划,尤其是在存在显著空间和时间依赖性的情况下。
- STALC通过分层拓扑图表示环境,并结合混合整数规划,实现了快速生成高度耦合的多机器人规划。
- 实验表明,STALC在多机器人侦察场景中能够有效降低被检测风险,并在真实硬件平台上成功验证。
📝 摘要(中文)
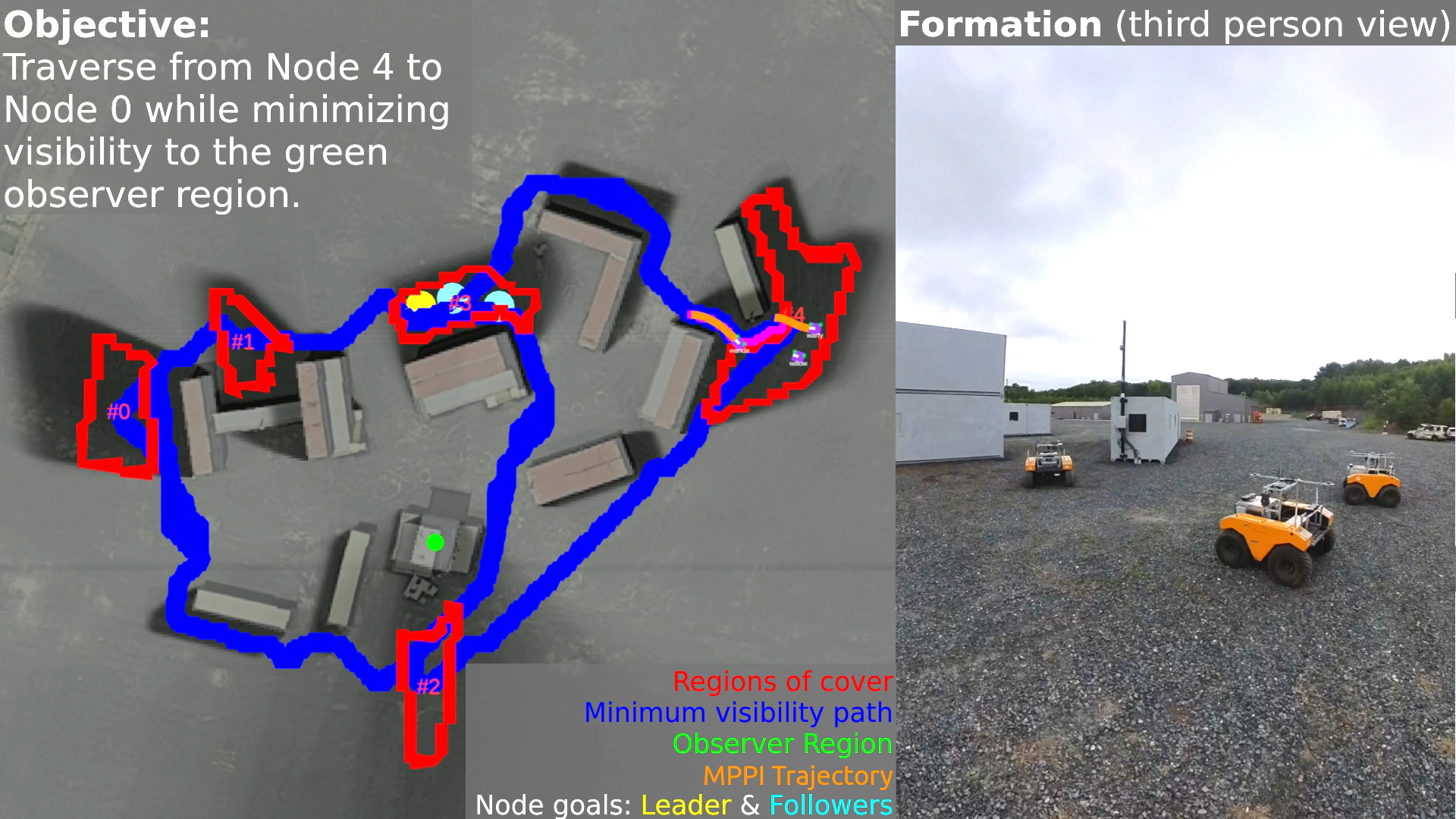
本文提出了一种用于长程协同的分层拓扑自主规划方法(STALC),旨在解决真实环境中具有显著机器人间空间和时间依赖性的多机器人协同机动问题。STALC的核心是一个基于图的多机器人规划器,它结合了拓扑图和一个新颖的、计算高效的混合整数规划公式,可以在数秒内生成高度耦合的多机器人规划。为了实现跨不同空间和时间尺度的自主规划,我们构建的图能够捕获自由空间区域和其他特定问题特征(如可穿越性或风险)之间的连通性。然后,我们使用后退视界规划器来实现局部避障和编队控制。为了评估我们的方法,我们考虑了一个多机器人侦察场景,其中机器人必须自主协调以在环境中导航,同时最大限度地降低被观察者检测到的风险。通过基于仿真的实验,我们表明我们的方法能够扩展以解决复杂的多机器人规划场景。通过硬件实验,我们展示了我们从真实世界数据生成图并成功地在整个层次结构中进行规划以实现共同目标的能力。
🔬 方法详解
问题定义:论文旨在解决多机器人协同规划问题,尤其是在真实复杂环境中,机器人之间存在显著的空间和时间依赖性,需要高度耦合的规划。现有方法在处理此类问题时,往往面临计算复杂度高、难以快速生成可行方案的挑战。
核心思路:论文的核心思路是采用分层拓扑图来抽象环境,将复杂的连续空间转化为离散的拓扑结构,从而降低规划的计算复杂度。同时,利用混合整数规划(MIP)来优化多机器人的运动轨迹,确保协同性和避免碰撞。分层结构允许在不同尺度上进行规划,从而提高整体规划效率。
技术框架:STALC的整体框架包含以下几个主要模块:1) 拓扑图构建:根据环境信息(如自由空间区域、可穿越性、风险等)构建拓扑图,表示环境的连通性。2) 多机器人规划:利用混合整数规划在拓扑图上生成全局的、高度耦合的多机器人规划。3) 后退视界规划:使用后退视界规划器进行局部避障和编队控制,保证规划的实时性和安全性。4) 分层控制:通过分层结构,在不同空间和时间尺度上进行规划和控制,实现长程协同。
关键创新:STALC的关键创新在于:1) 分层拓扑图表示:能够有效地抽象环境,降低规划复杂度,并支持不同尺度的规划。2) 高效的混合整数规划公式:能够在数秒内生成高度耦合的多机器人规划,满足实时性要求。3) 分层规划框架:将全局规划和局部控制相结合,实现了长程协同和局部避障的平衡。
关键设计:拓扑图的构建方式需要根据具体应用场景进行设计,例如,可以根据自由空间区域、可穿越性、风险等因素来定义节点和边。混合整数规划的公式需要仔细设计目标函数和约束条件,以确保规划的合理性和可行性。后退视界规划器的参数(如视界长度、控制频率等)需要根据机器人的运动能力和环境的动态性进行调整。
🖼️ 关键图片


📊 实验亮点
通过仿真实验,STALC在多机器人侦察场景中能够有效降低被观察者检测到的风险。硬件实验验证了STALC从真实世界数据生成图并成功在整个层次结构中进行规划以实现共同目标的能力。具体性能数据和对比基线在论文中未明确给出,属于未知信息。
🎯 应用场景
STALC适用于需要多机器人协同作业的复杂环境,例如:搜索救援、环境监测、协同侦察、仓库自动化等。该方法能够提高多机器人系统的自主性和协同效率,降低人工干预的需求,具有重要的实际应用价值和广阔的应用前景。未来可以进一步研究如何将STALC应用于动态环境和异构机器人系统。
📄 摘要(原文)
In this paper, we present Stratified Topological Autonomy for Long-Range Coordination (STALC), a hierarchical planning approach for coordinated multi-robot maneuvering in real-world environments with significant inter-robot spatial and temporal dependencies. At its core, STALC consists of a multi-robot graph-based planner which combines a topological graph with a novel, computationally efficient mixed-integer programming formulation to generate highly-coupled multi-robot plans in seconds. To enable autonomous planning across different spatial and temporal scales, we construct our graphs so that they capture connectivity between free-space regions and other problem-specific features, such as traversability or risk. We then use receding-horizon planners to achieve local collision avoidance and formation control. To evaluate our approach, we consider a multi-robot reconnaissance scenario where robots must autonomously coordinate to navigate through an environment while minimizing the risk of detection by observers. Through simulation-based experiments, we show that our approach is able to scale to address complex multi-robot planning scenarios. Through hardware experiments, we demonstrate our ability to generate graphs from real-world data and successfully plan across the entire hierarchy to achieve shared objectives.