AhaRobot: A Low-Cost Open-Source Bimanual Mobile Manipulator for Embodied AI
作者: Haiqin Cui, Yifu Yuan, Yan Zheng, Jianye Hao
分类: cs.RO, cs.AI, cs.LG
发布日期: 2025-03-13
备注: The first two authors contributed equally. Website: https://aha-robot.github.io
💡 一句话要点
AhaRobot:一种低成本开源双臂移动操作机器人,用于具身智能研究。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 具身智能 移动操作机器人 双臂机器人 遥操作 低成本机器人
📋 核心要点
- 具身智能在开放环境中的导航和操作面临挑战,现有商业移动操作机器人成本高昂,限制了实际场景的研究。
- AhaRobot采用低成本的硬件架构,优化控制方案,并设计了简易的远程遥操作方法RoboPilot,降低了研究门槛。
- 实验表明,RoboPilot显著提升了复杂操作任务的数据收集效率,并能完成超长时程任务,可用于学习端到端策略。
📝 摘要(中文)
本文提出AhaRobot,一种低成本且完全开源的双臂移动操作机器人系统,旨在解决具身智能中开放世界环境下的导航和操作难题。AhaRobot的硬件成本仅为1000美元(不包括可选的计算资源),远低于市面上流行的移动机器人(约为1/15)。该系统包含三个组成部分:(1)主要由现成组件构成的新型低成本硬件架构;(2)优化的控制方案,集成了双电机反冲控制和静摩擦补偿,以提高操作精度;(3)一种简单的远程遥操作方法RoboPilot,使用手柄控制双臂,踏板控制全身运动,操作简便,类似于驾驶。RoboPilot专为具身场景中的远程数据收集而设计。实验结果表明,RoboPilot显著提高了复杂操作任务中的数据收集效率,与使用3D鼠标和leader-follower系统的方法相比,效率提高了30%。它还擅长一次性完成超长时程任务。此外,AhaRobot可用于学习端到端策略,并自主执行复杂的操纵任务,例如插笔和清理地板。目标是构建一个经济实惠且功能强大的平台,以促进真实设备上具身任务的开发,从而推进更强大、更可靠的具身人工智能。
🔬 方法详解
问题定义:论文旨在解决具身智能在真实开放世界环境中进行导航和操作任务时,由于现有移动操作机器人成本过高而导致的研究受限问题。现有方法要么成本高昂,要么操作复杂,难以进行大规模数据收集和算法验证。
核心思路:论文的核心思路是设计一种低成本、易于操作且开源的双臂移动操作机器人平台AhaRobot,从而降低具身智能研究的门槛。通过采用现成的低成本组件、优化控制算法和简化的遥操作界面,使得研究人员能够更容易地在真实环境中进行数据收集、算法开发和实验验证。
技术框架:AhaRobot系统主要由三个部分组成:1)低成本硬件架构:采用现成的电机、传感器和结构件搭建双臂移动机器人平台;2)优化控制方案:通过双电机反冲控制和静摩擦补偿提高操作精度;3)远程遥操作方法RoboPilot:使用手柄和踏板进行直观的机器人控制,便于数据收集。整个系统通过ROS(Robot Operating System)进行集成和控制。
关键创新:AhaRobot的关键创新在于其低成本和开源的设计,使得更多的研究人员能够参与到具身智能的研究中。此外,RoboPilot遥操作方法通过简化的控制方式,显著提高了数据收集效率,使得研究人员能够更容易地获取高质量的训练数据。
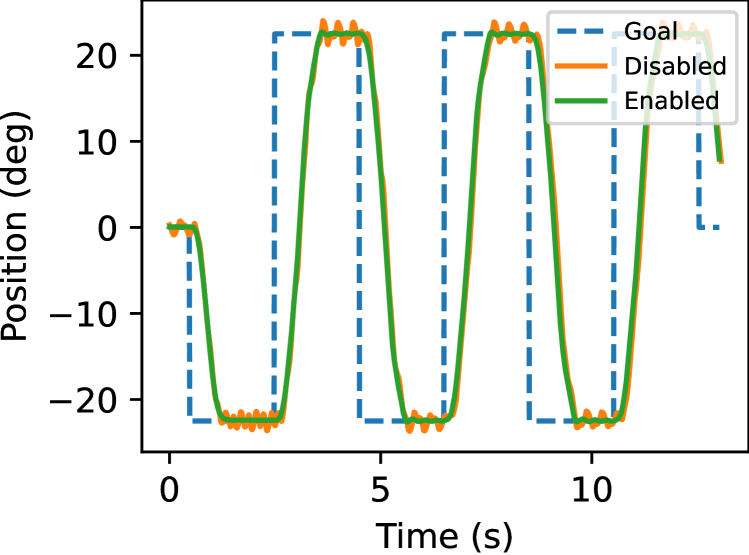
关键设计:在控制方面,采用了双电机反冲控制来减少齿轮间隙带来的误差,并使用静摩擦补偿来提高低速运动的精度。RoboPilot遥操作界面使用手柄控制双臂,踏板控制移动,降低了操作难度。硬件方面,尽可能采用现成的低成本组件,并提供详细的组装指南和软件代码。
🖼️ 关键图片


📊 实验亮点
实验结果表明,AhaRobot的RoboPilot遥操作方法在复杂操作任务中的数据收集效率比使用3D鼠标和leader-follower系统的方法提高了30%。此外,AhaRobot能够成功完成超长时程任务,并可用于学习端到端策略,自主执行复杂的操纵任务,例如插笔和清理地板,验证了其在具身智能研究中的潜力。
🎯 应用场景
AhaRobot可应用于具身智能的多个研究领域,例如机器人操作、强化学习、人机交互等。其低成本和开源的特性使其能够被广泛应用于教育、科研和工业领域,促进具身智能技术的发展和应用。未来,AhaRobot有望在家庭服务、物流仓储、灾难救援等场景中发挥重要作用。
📄 摘要(原文)
Navigation and manipulation in open-world environments remain unsolved challenges in the Embodied AI. The high cost of commercial mobile manipulation robots significantly limits research in real-world scenes. To address this issue, we propose AhaRobot, a low-cost and fully open-source dual-arm mobile manipulation robot system with a hardware cost of only $1,000 (excluding optional computational resources), which is less than 1/15 of the cost of popular mobile robots. The AhaRobot system consists of three components: (1) a novel low-cost hardware architecture primarily composed of off-the-shelf components, (2) an optimized control solution to enhance operational precision integrating dual-motor backlash control and static friction compensation, and (3) a simple remote teleoperation method RoboPilot. We use handles to control the dual arms and pedals for whole-body movement. The teleoperation process is low-burden and easy to operate, much like piloting. RoboPilot is designed for remote data collection in embodied scenarios. Experimental results demonstrate that RoboPilot significantly enhances data collection efficiency in complex manipulation tasks, achieving a 30% increase compared to methods using 3D mouse and leader-follower systems. It also excels at completing extremely long-horizon tasks in one go. Furthermore, AhaRobot can be used to learn end-to-end policies and autonomously perform complex manipulation tasks, such as pen insertion and cleaning up the floor. We aim to build an affordable yet powerful platform to promote the development of embodied tasks on real devices, advancing more robust and reliable embodied AI. All hardware and software systems are available at https://aha-robot.github.io.