AI-based Framework for Robust Model-Based Connector Mating in Robotic Wire Harness Installation
作者: Claudius Kienle, Benjamin Alt, Finn Schneider, Tobias Pertlwieser, Rainer Jäkel, Rania Rayyes
分类: cs.RO, cs.AI, cs.CE, cs.LG
发布日期: 2025-03-12 (更新: 2025-06-09)
备注: 6 pages, 6 figures, 4 tables, presented at the 2025 IEEE 21st International Conference on Automation Science and Engineering (CASE 2025)
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出基于AI的连接器自动插拔框架,提升机器人线束安装的鲁棒性与效率
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人 线束安装 连接器插拔 深度学习 多模态学习
📋 核心要点
- 汽车装配中线束安装仍依赖人工,因其需要精确和灵活的操作,现有机器人方案难以胜任。
- 论文提出基于AI的框架,融合力控制与深度视觉触觉学习,优化连接器插拔的搜索和插入策略。
- 实验结果表明,该框架在周期时间和鲁棒性方面优于传统机器人编程方法,提升了自动化水平。
📝 摘要(中文)
本文设计了一种新颖的基于人工智能的框架,通过集成力控制与深度视觉触觉学习,实现电缆连接器自动插拔。该系统利用多模态Transformer架构,基于视觉、触觉和本体感受数据进行训练,并通过一阶优化算法优化搜索和插入策略。此外,我们设计了一种新型的自动化数据收集和优化流程,最大限度地减少了对机器学习专业知识的需求。该框架优化后的机器人程序可以直接在标准工业控制器上运行,方便人工专家审核和认证。在中央控制台装配任务上的实验验证表明,与传统的机器人编程方法相比,该框架在周期时间和鲁棒性方面都有显著提高。相关视频可在https://claudius-kienle.github.io/AppMuTT 找到。
🔬 方法详解
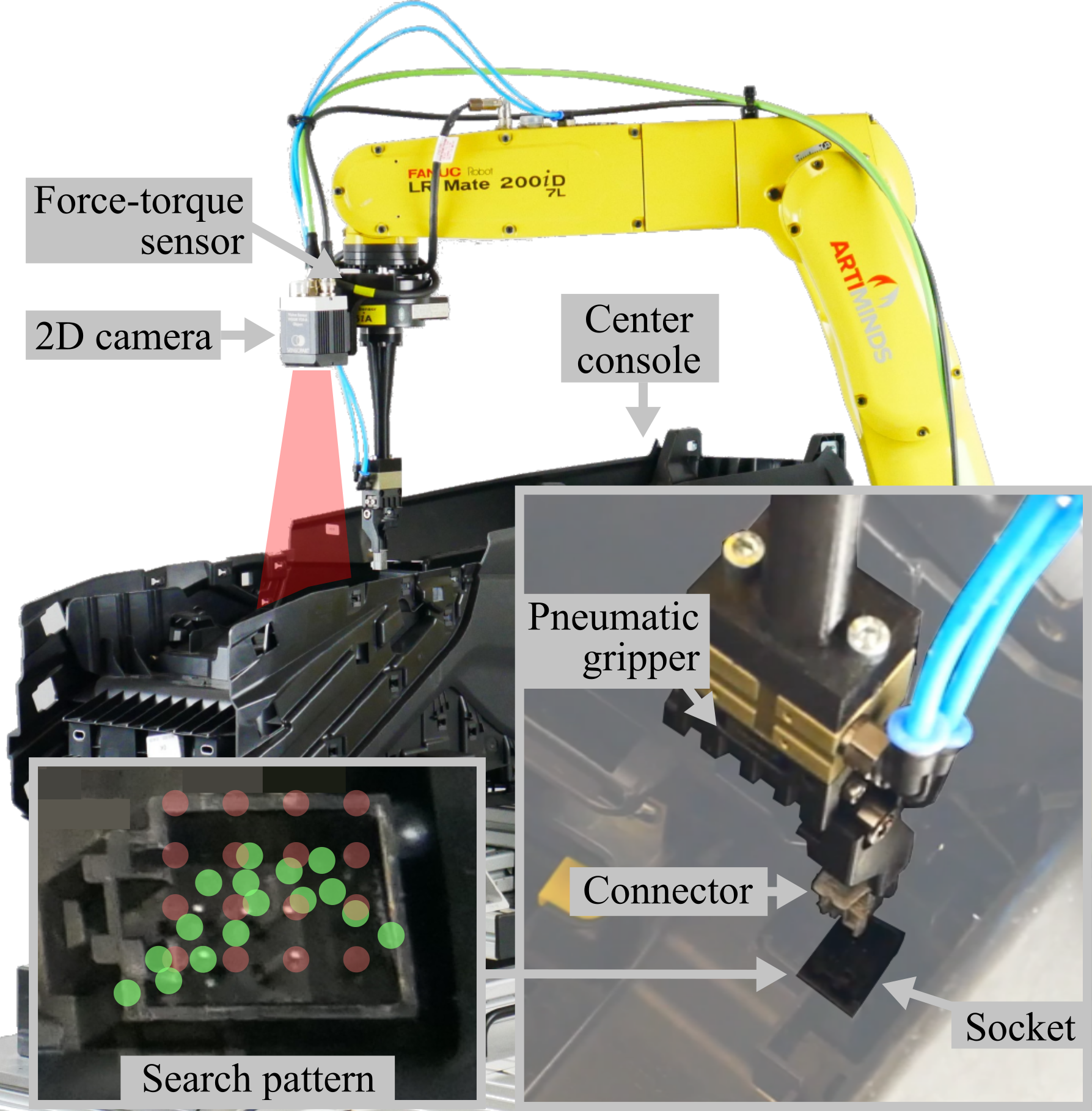
问题定义:论文旨在解决汽车线束安装过程中,电缆连接器自动插拔的难题。现有机器人编程方法在处理此类任务时,通常缺乏足够的鲁棒性和灵活性,难以应对实际装配过程中存在的各种不确定性,导致自动化程度低,仍需大量人工干预。
核心思路:论文的核心思路是将力控制与深度视觉触觉学习相结合,利用多模态信息感知环境状态,并采用优化算法搜索最佳的插拔策略。通过学习视觉、触觉和本体感受数据之间的关联,使机器人能够更好地适应连接器插拔过程中的各种变化,从而提高插拔的成功率和效率。
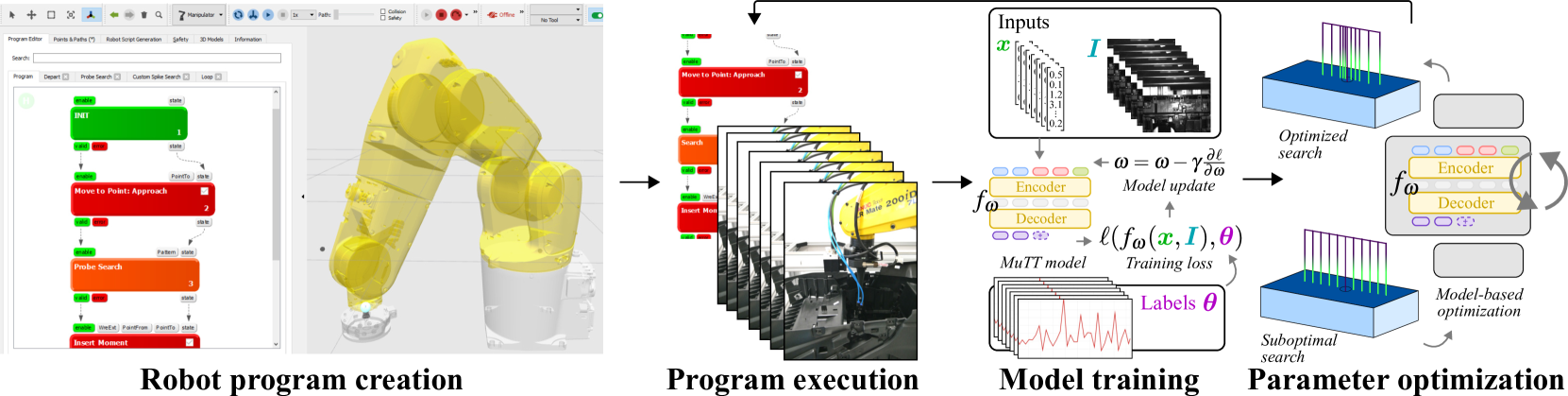
技术框架:该框架包含以下主要模块:1) 数据采集模块,用于收集视觉、触觉和本体感受数据;2) 多模态Transformer架构,用于学习多模态数据之间的关联;3) 优化模块,利用一阶优化算法搜索最佳的插拔策略;4) 力控制模块,用于精确控制机器人的运动和力。整个流程包括数据收集、模型训练、策略优化和机器人执行等阶段。
关键创新:该论文的关键创新在于:1) 提出了一种基于多模态Transformer架构的深度视觉触觉学习方法,能够有效地融合视觉、触觉和本体感受数据;2) 设计了一种自动化数据收集和优化流程,降低了对机器学习专业知识的需求;3) 优化后的机器人程序可以直接在标准工业控制器上运行,方便人工专家审核和认证。
关键设计:论文中使用了Transformer架构来处理多模态数据,具体网络结构未知。损失函数的设计也未详细说明,但推测可能包含用于回归插拔位置和方向的损失,以及用于约束力/力矩的损失。优化算法采用一阶优化,具体算法未知,但可能是Adam或SGD的变种。关键参数设置未知。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该框架在中央控制台装配任务中,与传统的机器人编程方法相比,在周期时间和鲁棒性方面都有显著提高。具体提升幅度和性能数据未知,但摘要中明确指出有“significant improvements”,表明该方法具有实际应用价值。
🎯 应用场景
该研究成果可应用于汽车、电子、航空航天等领域的线束安装自动化,尤其适用于需要高精度和高鲁棒性的连接器插拔任务。通过降低人工干预,提高生产效率和产品质量,降低生产成本。未来,该技术有望扩展到其他需要精细操作的机器人应用场景,如医疗手术、精密仪器装配等。
📄 摘要(原文)
Despite the widespread adoption of industrial robots in automotive assembly, wire harness installation remains a largely manual process, as it requires precise and flexible manipulation. To address this challenge, we design a novel AI-based framework that automates cable connector mating by integrating force control with deep visuotactile learning. Our system optimizes search-and-insertion strategies using first-order optimization over a multimodal transformer architecture trained on visual, tactile, and proprioceptive data. Additionally, we design a novel automated data collection and optimization pipeline that minimizes the need for machine learning expertise. The framework optimizes robot programs that run natively on standard industrial controllers, permitting human experts to audit and certify them. Experimental validations on a center console assembly task demonstrate significant improvements in cycle times and robustness compared to conventional robot programming approaches. Videos are available under https://claudius-kienle.github.io/AppMuTT.