TetraGrip: Sensor-Driven Multi-Suction Reactive Object Manipulation in Cluttered Scenes
作者: Paolo Torrado, Joshua Levin, Markus Grotz, Joshua Smith
分类: cs.RO, cs.LG, eess.SY
发布日期: 2025-03-12
💡 一句话要点
TetraGrip:基于传感器的多吸盘反应式操作,解决复杂场景下的物体抓取问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人抓取 真空吸盘 强化学习 反应式控制 仓库自动化
📋 核心要点
- 仓库环境中,机器人抓取面临遮挡、物体方向多样、堆叠等挑战,传统吸盘抓取器难以应对。
- TetraGrip采用四个带ToF传感器的线性执行器吸盘,实现反应式抓取,提升复杂场景下的抓取能力。
- 实验表明,TetraGrip在堆叠物体抓取成功率上比单吸盘提升22.86%,并能处理遮挡等复杂情况。
📝 摘要(中文)
本文提出了一种名为TetraGrip的新型真空抓取策略,旨在提高仓库机器人系统在密集货架环境中抓取各种物体的可靠性。该策略采用四个安装在线性执行器上的吸盘,每个执行器都配备了光学飞行时间(ToF)接近传感器,从而实现反应式抓取。我们在仓库环境中评估了TetraGrip,展示了其在堆叠和遮挡配置中操作物体的能力。实验结果表明,与单吸盘夹具相比,基于强化学习的策略在堆叠物体场景中的抓取成功率提高了22.86%。此外,TetraGrip还能成功抓取单吸盘夹具因物理限制而失败的物体,例如抓取被其他物体遮挡的物体以及在复杂场景中检索物体。这些发现突出了多驱动、基于吸盘的抓取在非结构化仓库环境中的优势。
🔬 方法详解
问题定义:论文旨在解决仓库环境中,机器人抓取被遮挡、堆叠或具有复杂摆放姿态的物体时,传统单吸盘抓取器成功率低的问题。现有方法难以有效感知和适应复杂环境,容易发生抓取失败。
核心思路:论文的核心思路是利用多个独立控制的吸盘,每个吸盘配备接近传感器,实现对物体表面形状和位置的感知,并根据感知信息调整吸盘的位置和吸力,从而提高抓取的稳定性和成功率。这种多吸盘、反应式的抓取方式能够更好地适应复杂场景。
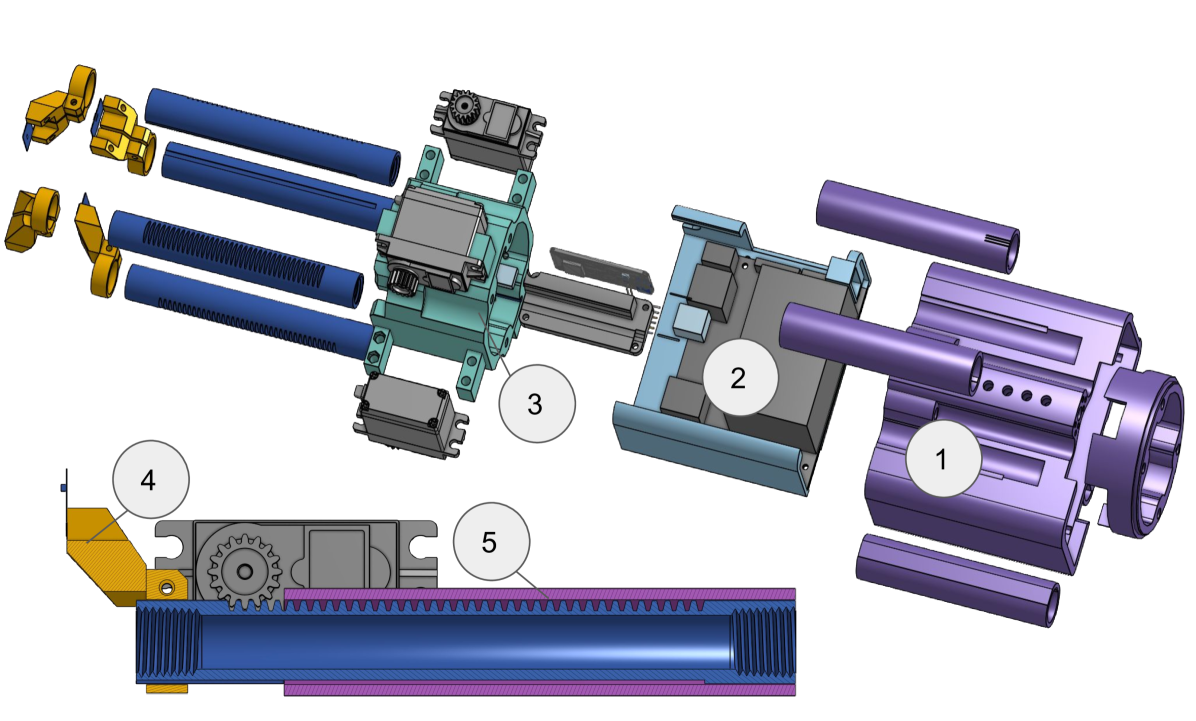
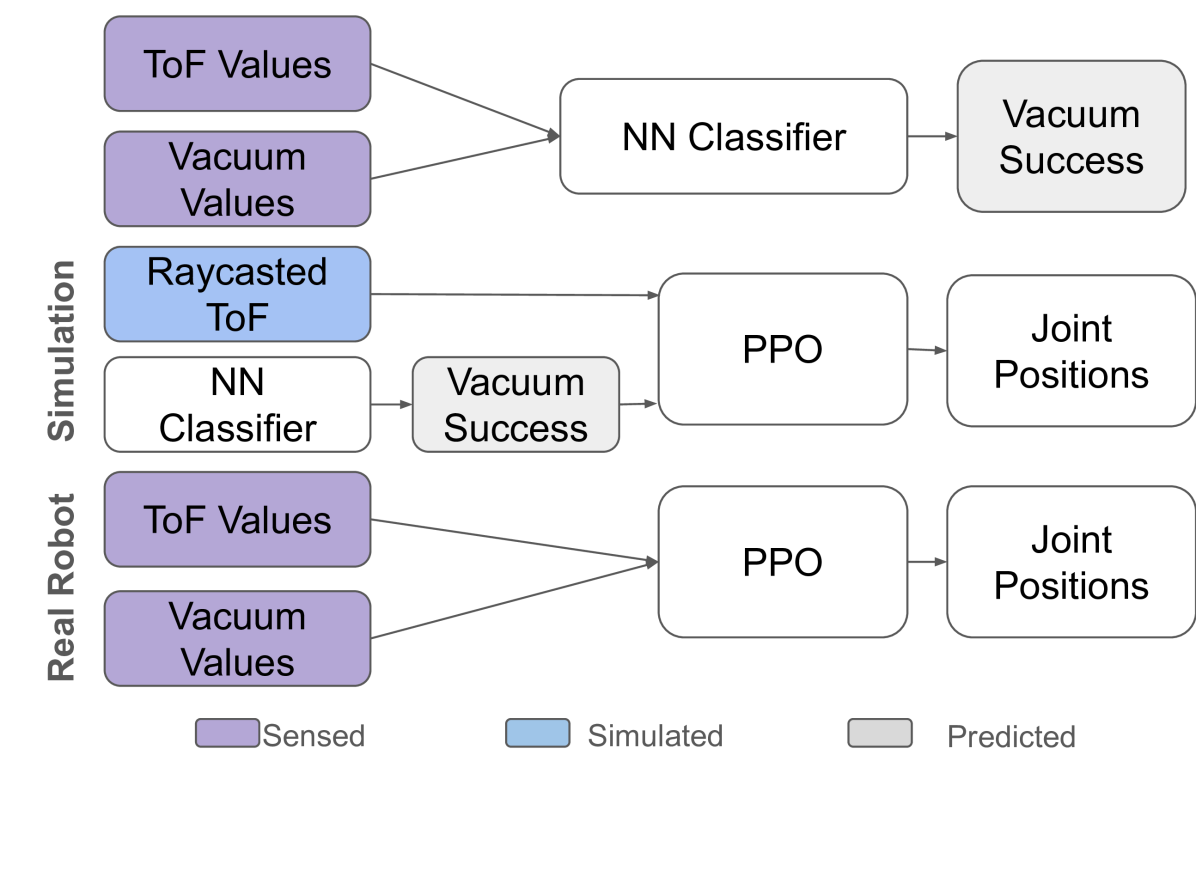
技术框架:TetraGrip系统包含四个线性执行器,每个执行器末端安装一个吸盘和一个ToF接近传感器。系统通过ToF传感器获取物体表面的距离信息,然后利用强化学习策略控制线性执行器的运动,调整吸盘的位置和吸力,最终实现稳定抓取。整个流程包括感知、决策和执行三个阶段。
关键创新:该论文的关键创新在于将多个吸盘与线性执行器和接近传感器相结合,实现了反应式抓取。与传统的固定式多吸盘抓取器相比,TetraGrip能够根据物体形状和位置动态调整吸盘的位置,从而更好地适应复杂场景。此外,利用强化学习策略优化抓取控制,进一步提高了抓取的成功率。
关键设计:每个线性执行器的运动范围和速度是关键参数,需要根据实际应用场景进行调整。ToF传感器的精度和采样频率也会影响感知效果。强化学习策略的设计也至关重要,需要选择合适的奖励函数和状态空间,以训练出能够有效控制吸盘运动的策略。论文中具体使用的强化学习算法和参数设置未知。
🖼️ 关键图片

📊 实验亮点
实验结果表明,TetraGrip在堆叠物体场景中的抓取成功率比单吸盘夹具提高了22.86%。此外,TetraGrip能够成功抓取单吸盘夹具因物理限制而无法抓取的物体,例如被其他物体遮挡的物体。这些实验结果验证了TetraGrip在复杂场景下的优越性能。
🎯 应用场景
TetraGrip技术可应用于自动化仓库、物流分拣、智能制造等领域,尤其适用于处理形状各异、摆放不规则的物体。该技术能够提高机器人抓取的可靠性和效率,降低人工干预的需求,从而提升自动化水平和生产效率。未来,该技术有望扩展到更复杂的环境和任务中,例如家庭服务机器人和医疗机器人。
📄 摘要(原文)
Warehouse robotic systems equipped with vacuum grippers must reliably grasp a diverse range of objects from densely packed shelves. However, these environments present significant challenges, including occlusions, diverse object orientations, stacked and obstructed items, and surfaces that are difficult to suction. We introduce \tetra, a novel vacuum-based grasping strategy featuring four suction cups mounted on linear actuators. Each actuator is equipped with an optical time-of-flight (ToF) proximity sensor, enabling reactive grasping. We evaluate \tetra in a warehouse-style setting, demonstrating its ability to manipulate objects in stacked and obstructed configurations. Our results show that our RL-based policy improves picking success in stacked-object scenarios by 22.86\% compared to a single-suction gripper. Additionally, we demonstrate that TetraGrip can successfully grasp objects in scenarios where a single-suction gripper fails due to physical limitations, specifically in two cases: (1) picking an object occluded by another object and (2) retrieving an object in a complex scenario. These findings highlight the advantages of multi-actuated, suction-based grasping in unstructured warehouse environments. The project website is available at: \href{https://tetragrip.github.io/}{https://tetragrip.github.io/}.