Efficient Trajectory Generation Based on Traversable Planes in 3D Complex Architectural Spaces
作者: Mengke Zhang, Zhihao Tian, Yaoguang Xia, Chao Xu, Fei Gao, Yanjun Cao
分类: cs.RO
发布日期: 2025-03-11
备注: 7 pages, 8 figures, 2tables. The paper has been accepted by ICRA 2025
💡 一句话要点
提出基于可通行平面的高效轨迹生成方法,用于复杂建筑空间中的地面机器人导航。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 轨迹规划 自主导航 地面机器人 可通行平面 平面图
📋 核心要点
- 现有方法难以在复杂建筑空间中生成高效、平滑、全面和高质量的机器人轨迹。
- 该方法通过提取可通行平面并构建平面图,将复杂环境简化为平面间的导航问题。
- 实验结果表明,该方法在模拟和真实环境中均有效,提升了机器人的自主导航能力。
📝 摘要(中文)
本文提出了一种新颖的地面机器人高效路径规划器,用于在大型复杂多层建筑空间中自主导航。考虑到可通行区域通常包括地面、斜坡和楼梯等平面或近似平面结构,我们将问题简化为在复杂相交平面内和平面之间的导航。我们首先通过分割、合并、分类和连接从3D点云中提取可通行平面,构建一个轻量级的平面图,该图完整地表示了可通行区域。然后,我们构建了一个基于运动状态轨迹的轨迹优化,并充分考虑了跨越多层平面时的特殊约束,以最大限度地提高机器人的机动性。我们在模拟环境中进行了实验,并在真实场景中的CubeTrack机器人上进行了测试,验证了该方法的有效性和实用性。
🔬 方法详解
问题定义:论文旨在解决地面机器人在复杂多层建筑空间中高效生成轨迹的问题。现有方法难以在这些环境中生成平滑、全面且高质量的轨迹,尤其是在处理不同楼层之间的过渡时,例如楼梯和斜坡。
核心思路:核心思路是将复杂的三维环境简化为一系列相交的可通行平面。通过提取这些平面并构建平面图,可以将轨迹规划问题转化为在平面内和平面之间寻找最优路径的问题。这种方法降低了问题的复杂度,并允许更高效的轨迹生成。
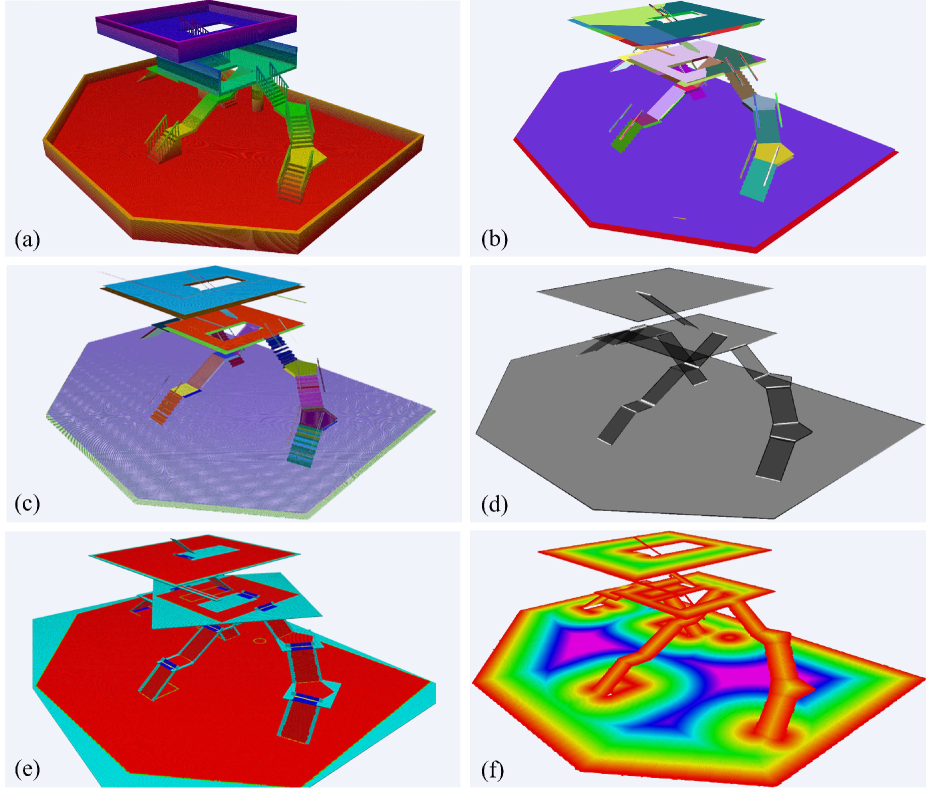
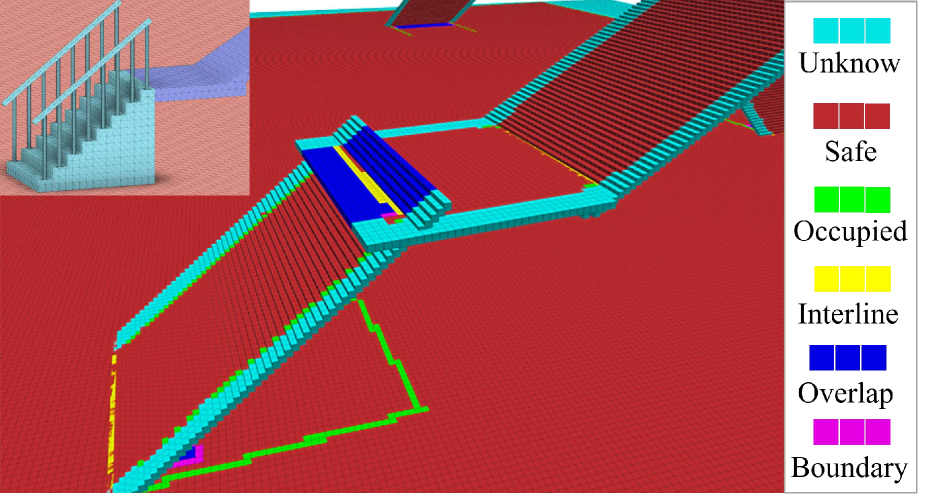
技术框架:该方法主要包含以下几个阶段:1) 平面提取:从3D点云数据中分割、合并、分类和连接可通行平面。2) 平面图构建:基于提取的平面构建一个轻量级的平面图,该图表示了环境中的可通行区域。3) 轨迹优化:基于运动状态轨迹进行轨迹优化,并考虑跨越多层平面时的特殊约束。
关键创新:该方法的关键创新在于将复杂的三维环境表示为可通行平面的集合,并利用平面图进行轨迹规划。这种表示方法简化了环境模型,并允许更高效的轨迹生成。此外,该方法还考虑了跨越多层平面时的特殊约束,例如楼梯和斜坡,从而提高了机器人的机动性。
关键设计:平面提取阶段使用了基于区域增长的分割算法,并结合了平面拟合和分类技术。轨迹优化阶段使用了基于B样条的轨迹表示,并采用了考虑动力学约束和环境约束的优化目标函数。跨平面过渡的约束被建模为非线性约束,并在优化过程中进行处理。具体的参数设置和损失函数细节在论文中进行了详细描述(未知)。
🖼️ 关键图片

📊 实验亮点
该方法在模拟环境和真实场景中进行了验证。在真实场景中,该方法成功地控制CubeTrack机器人在复杂的多层建筑空间中自主导航。实验结果表明,该方法能够生成高效、平滑且安全的轨迹,并且具有良好的鲁棒性。具体的性能指标,例如轨迹生成时间和导航成功率,在论文中进行了量化分析(具体数值未知)。
🎯 应用场景
该研究成果可应用于各种需要在复杂建筑空间中进行自主导航的地面机器人,例如清洁机器人、巡逻机器人、物流机器人和导览机器人。通过提高机器人在这些环境中的导航效率和安全性,可以提升用户体验并降低运营成本。未来,该方法可以扩展到处理更复杂的环境,例如非结构化环境和动态环境。
📄 摘要(原文)
With the increasing integration of robots into human life, their role in architectural spaces where people spend most of their time has become more prominent. While motion capabilities and accurate localization for automated robots have rapidly developed, the challenge remains to generate efficient, smooth, comprehensive, and high-quality trajectories in these areas. In this paper, we propose a novel efficient planner for ground robots to autonomously navigate in large complex multi-layered architectural spaces. Considering that traversable regions typically include ground, slopes, and stairs, which are planar or nearly planar structures, we simplify the problem to navigation within and between complex intersecting planes. We first extract traversable planes from 3D point clouds through segmenting, merging, classifying, and connecting to build a plane-graph, which is lightweight but fully represents the traversable regions. We then build a trajectory optimization based on motion state trajectory and fully consider special constraints when crossing multi-layer planes to maximize the robot's maneuverability. We conduct experiments in simulated environments and test on a CubeTrack robot in real-world scenarios, validating the method's effectiveness and practicality.