RoboCopilot: Human-in-the-loop Interactive Imitation Learning for Robot Manipulation
作者: Philipp Wu, Yide Shentu, Qiayuan Liao, Ding Jin, Menglong Guo, Koushil Sreenath, Xingyu Lin, Pieter Abbeel
分类: cs.RO
发布日期: 2025-03-10
💡 一句话要点
RoboCopilot:用于机器人操作的人在环交互式模仿学习
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 人机交互 模仿学习 机器人操作 双臂机器人 遥操作
📋 核心要点
- 现有模仿学习方法依赖被动人类演示数据,忽略了交互式教学的优势和人机界面支持不足的问题。
- RoboCopilot系统通过柔顺的双边遥操作,实现人类与自主策略的无缝切换,促进高效学习。
- 仿真和硬件实验验证了该系统在学习复杂双臂操作技能方面的有效性,提升了交互式教学的价值。
📝 摘要(中文)
本文提出了一种新颖的系统,用于双臂操作任务中,实现人类与自主策略之间的无缝控制切换,从而更有效地学习新任务。现有方法侧重于从被动的人类演示数据中学习,而忽略了交互式人类教学在理论和实践上的优势,以及现有的人机界面对其支持不足的问题。该系统通过一个柔顺的双边遥操作系统实现上述目标。通过仿真和硬件实验,证明了该系统在交互式人类教学中学习复杂双臂操作技能的价值。
🔬 方法详解
问题定义:论文旨在解决机器人模仿学习中,如何更有效地利用人类交互来学习复杂双臂操作技能的问题。现有方法主要依赖于被动的人类演示数据,数据收集虽然简单,但学习效率较低,且难以处理复杂任务。交互式教学具有更高的学习效率和适应性,但现有的人机界面难以支持流畅的人机协作,限制了其应用。
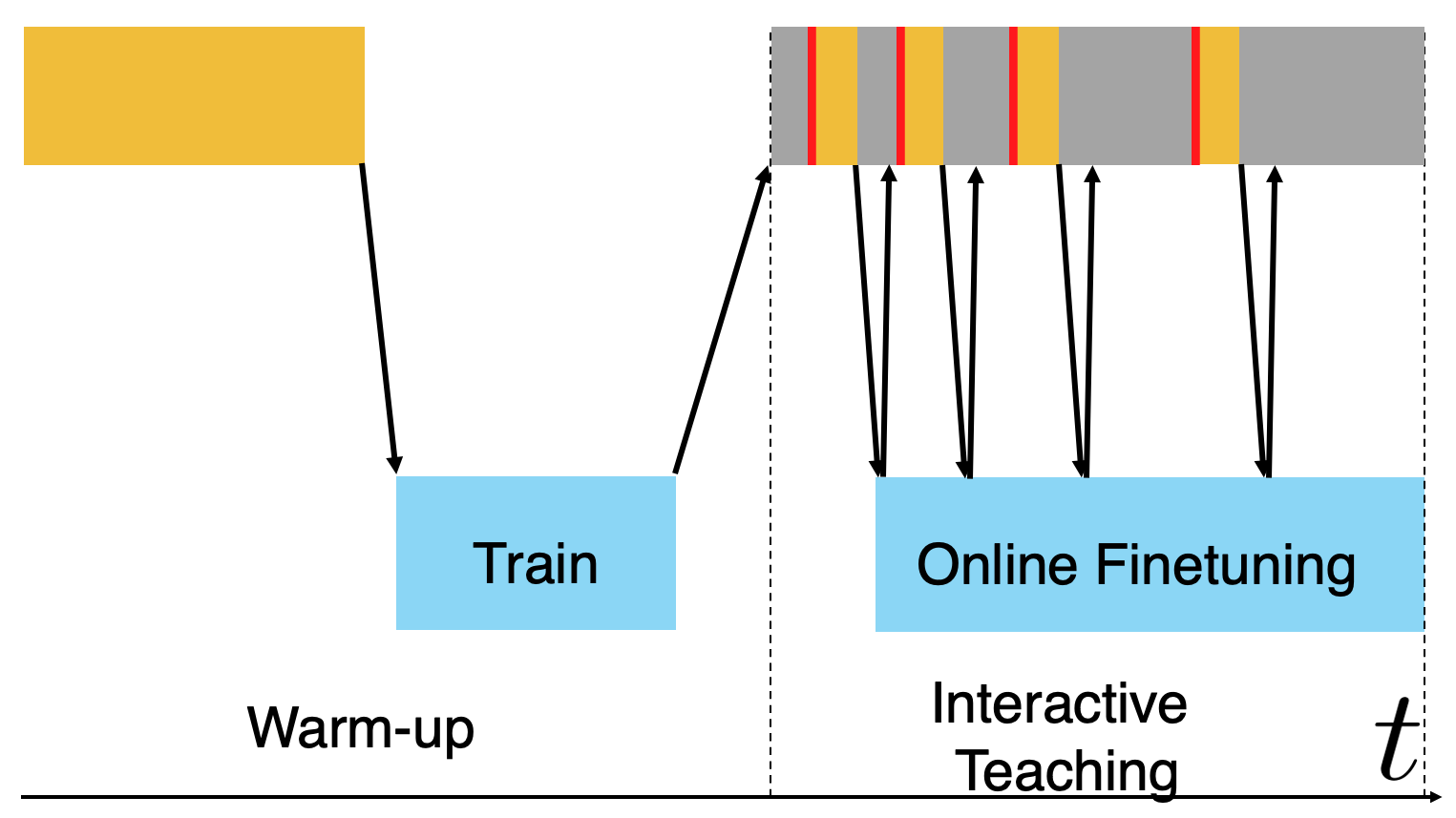
核心思路:论文的核心思路是设计一个能够实现人类与自主策略之间无缝切换的系统,让人类能够随时介入并指导机器人的学习过程。通过这种交互式的方式,机器人可以更快地学习到复杂的技能,并更好地适应不同的任务需求。
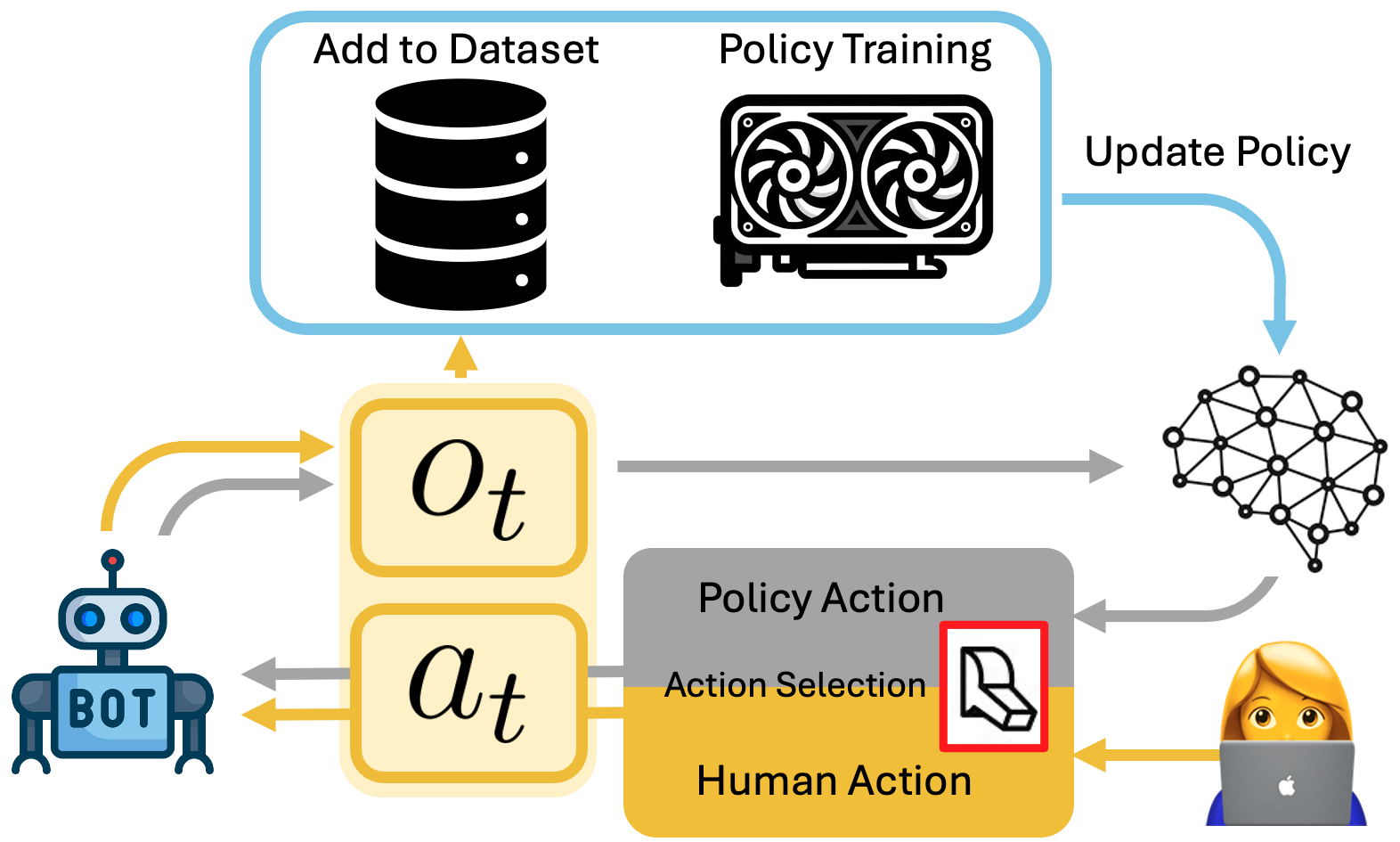
技术框架:RoboCopilot系统主要包含以下几个模块:1) 双边遥操作界面:允许人类通过遥操作控制机器人;2) 自主策略模块:基于模仿学习训练得到的自主策略,能够自主完成部分任务;3) 控制切换模块:实现人类控制与自主策略之间的平滑切换;4) 任务环境感知模块:用于感知任务环境的状态信息。
关键创新:该论文的关键创新在于提出了一个能够实现人类与自主策略之间无缝切换的交互式模仿学习系统。该系统允许人类随时介入并指导机器人的学习过程,从而提高了学习效率和适应性。此外,该系统还采用了柔顺的双边遥操作界面,使得人类能够更自然地与机器人进行交互。
关键设计:在双边遥操作界面中,采用了力反馈技术,让人类能够感受到机器人与环境之间的交互力。在控制切换模块中,采用了平滑切换算法,保证了人类控制与自主策略之间的平稳过渡。在自主策略模块中,采用了基于Transformer的模仿学习模型,能够有效地学习人类的动作序列。
🖼️ 关键图片

📊 实验亮点
实验结果表明,RoboCopilot系统能够显著提高机器人学习复杂双臂操作技能的效率。与传统的被动模仿学习方法相比,该系统能够以更少的训练数据和更短的时间,学习到相同的技能。在硬件实验中,该系统成功地完成了多个复杂的双臂操作任务,例如:双臂协同装配、双臂协同抓取等。
🎯 应用场景
该研究成果可应用于各种需要复杂操作技能的机器人任务中,例如:工业装配、医疗手术、家庭服务等。通过人机协作,机器人能够更好地完成这些任务,提高生产效率和服务质量。未来,该技术有望进一步发展,实现更智能、更灵活的机器人操作。
📄 摘要(原文)
Learning from human demonstration is an effective approach for learning complex manipulation skills. However, existing approaches heavily focus on learning from passive human demonstration data for its simplicity in data collection. Interactive human teaching has appealing theoretical and practical properties, but they are not well supported by existing human-robot interfaces. This paper proposes a novel system that enables seamless control switching between human and an autonomous policy for bi-manual manipulation tasks, enabling more efficient learning of new tasks. This is achieved through a compliant, bilateral teleoperation system. Through simulation and hardware experiments, we demonstrate the value of our system in an interactive human teaching for learning complex bi-manual manipulation skills.