RoboDesign1M: A Large-scale Dataset for Robot Design Understanding
作者: Tri Le, Toan Nguyen, Quang Tran, Quang Nguyen, Baoru Huang, Hoan Nguyen, Minh Nhat Vu, Tung D. Ta, Anh Nguyen
分类: cs.RO
发布日期: 2025-03-09
备注: 8 pages
💡 一句话要点
提出RoboDesign1M大规模数据集,促进机器人设计理解与AI辅助设计研究。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人设计 大规模数据集 多模态数据 半自动化数据收集 设计理解
📋 核心要点
- 机器人设计复杂且耗时,缺乏大规模数据集阻碍了AI在自动化设计生成等方面的应用。
- 论文提出RoboDesign1M数据集,包含百万级样本,利用半自动化流程从科学文献中获取多模态机器人设计数据。
- 实验表明,RoboDesign1M在设计图像生成、视觉问答和图像检索等任务中表现出挑战性,可作为新的基准。
📝 摘要(中文)
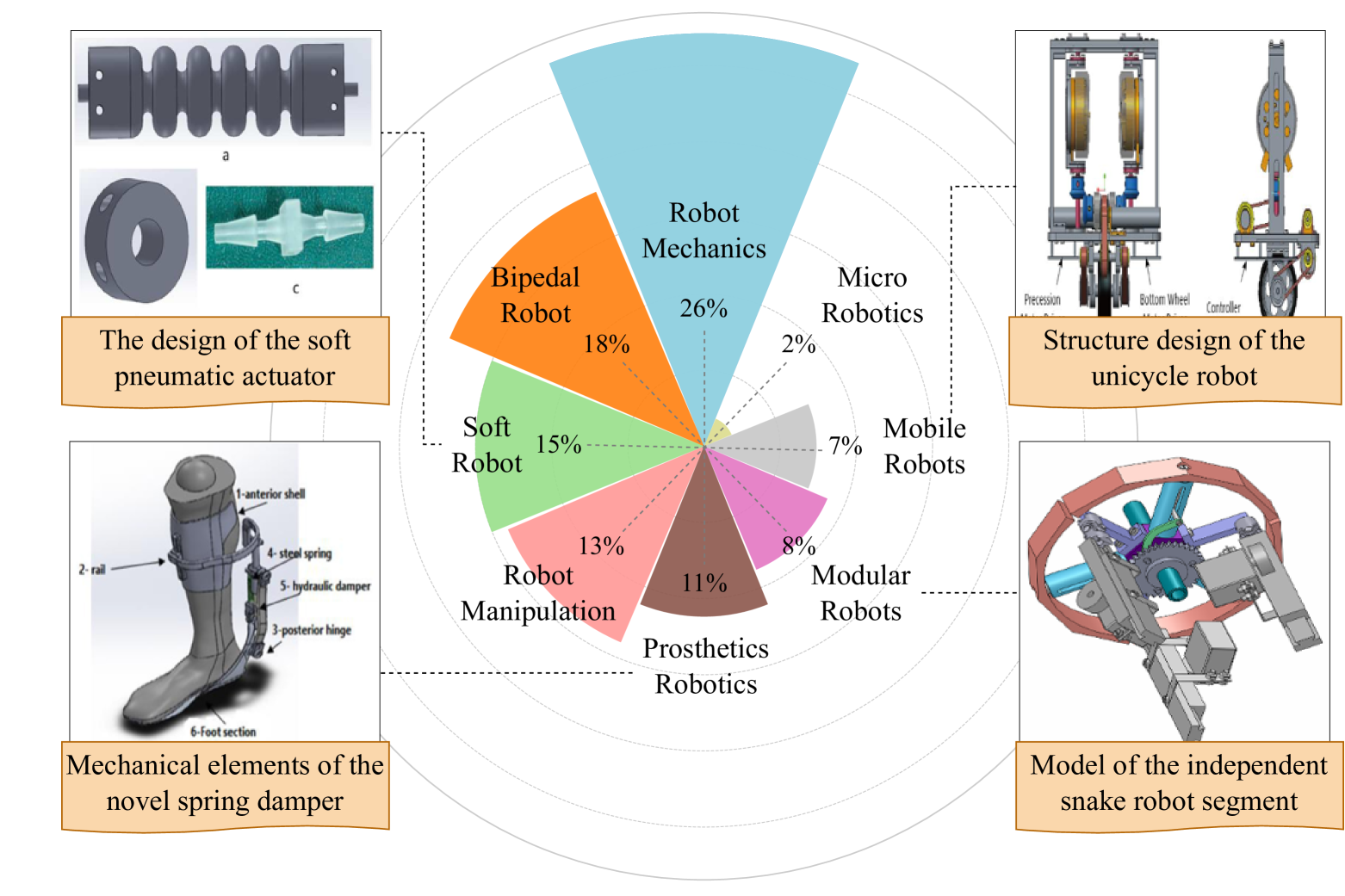
本文介绍了一个名为RoboDesign1M的大规模数据集,它包含100万个样本,旨在促进机器人设计理解的研究。该数据集包含从科学文献中收集的多模态数据,涵盖了各种机器人领域。为了高效地获取多样化的数据,作者提出了一种半自动化的数据收集流程。为了评估RoboDesign1M的有效性,作者在多个任务上进行了广泛的实验,包括设计图像生成、关于设计的视觉问答以及设计图像检索。实验结果表明,该数据集可以作为一个具有挑战性的新基准,用于设计理解任务,并有潜力推动人工智能驱动的机器人设计自动化领域的研究。RoboDesign1M将被公开发布,以支持该领域的进一步发展。
🔬 方法详解
问题定义:现有机器人设计依赖专家知识,过程复杂耗时。缺乏大规模、多样化的机器人设计数据集,阻碍了利用深度学习等人工智能技术进行自动化设计、文本检索设计方案等研究的进展。现有方法难以有效学习和理解机器人设计的内在规律和知识。
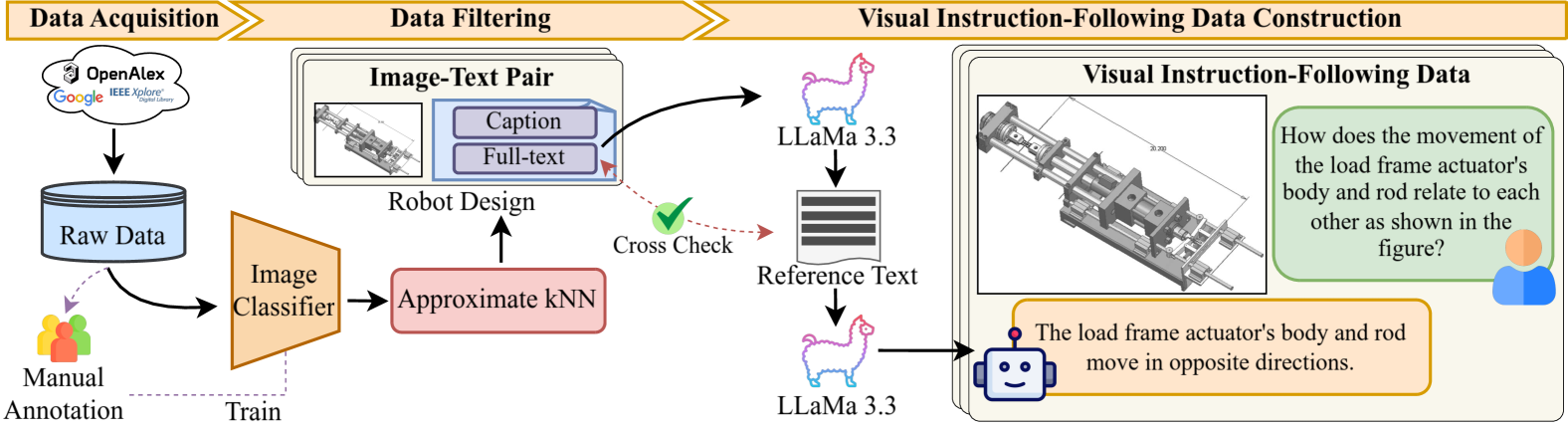
核心思路:论文的核心思路是构建一个大规模的机器人设计数据集,为相关研究提供数据基础。通过半自动化的数据收集流程,从科学文献中提取机器人设计相关的多模态信息,包括图像、文本描述等,从而覆盖更广泛的机器人设计领域。
技术框架:RoboDesign1M数据集的构建主要包含以下几个阶段: 1. 数据源选择:选择包含大量机器人设计相关信息的科学文献作为数据来源。 2. 数据提取:利用半自动化的流程,从文献中提取机器人设计的图像和文本描述。 3. 数据清洗与标注:对提取的数据进行清洗,去除噪声数据,并进行必要的标注,例如机器人类型、功能等。 4. 数据集构建:将清洗和标注后的数据整理成统一的格式,构建成RoboDesign1M数据集。
关键创新:该论文的关键创新在于构建了一个大规模的、多模态的机器人设计数据集RoboDesign1M。与现有的小规模数据集相比,RoboDesign1M包含100万个样本,覆盖了更广泛的机器人设计领域,为机器人设计理解和AI辅助设计提供了更强大的数据支持。半自动化的数据收集流程也提高了数据获取的效率和多样性。
关键设计:半自动化的数据收集流程是关键设计之一,具体细节未知。论文中提到在多个任务上进行了实验,包括设计图像生成、视觉问答和设计图像检索,但没有详细说明具体的网络结构、损失函数和参数设置。这些实验的设计旨在验证数据集的有效性和挑战性。
🖼️ 关键图片
📊 实验亮点
论文通过在设计图像生成、视觉问答和设计图像检索等任务上的实验,验证了RoboDesign1M数据集的有效性。实验结果表明,该数据集对现有模型提出了挑战,并能够促进相关算法的改进。具体的性能数据和提升幅度在摘要中未详细说明,但强调了该数据集作为新基准的潜力。
🎯 应用场景
RoboDesign1M数据集的应用场景广泛,包括:1) 自动化机器人设计生成,根据用户需求自动生成机器人设计方案;2) 基于文本的机器人设计检索,根据文本描述检索相似的机器人设计;3) AI驱动的机器人设计助手,辅助工程师进行机器人设计。该数据集有望加速机器人设计领域的智能化进程,降低设计成本,提高设计效率。
📄 摘要(原文)
Robot design is a complex and time-consuming process that requires specialized expertise. Gaining a deeper understanding of robot design data can enable various applications, including automated design generation, retrieving example designs from text, and developing AI-powered design assistants. While recent advancements in foundation models present promising approaches to addressing these challenges, progress in this field is hindered by the lack of large-scale design datasets. In this paper, we introduce RoboDesign1M, a large-scale dataset comprising 1 million samples. Our dataset features multimodal data collected from scientific literature, covering various robotics domains. We propose a semi-automated data collection pipeline, enabling efficient and diverse data acquisition. To assess the effectiveness of RoboDesign1M, we conduct extensive experiments across multiple tasks, including design image generation, visual question answering about designs, and design image retrieval. The results demonstrate that our dataset serves as a challenging new benchmark for design understanding tasks and has the potential to advance research in this field. RoboDesign1M will be released to support further developments in AI-driven robotic design automation.