Vision-Based Cooperative MAV-Capturing-MAV
作者: Canlun Zheng, Yize Mi, Hanqing Guo, Huaben Chen, Shiyu Zhao
分类: cs.RO, cs.MA, eess.SY
发布日期: 2025-03-09
💡 一句话要点
提出一种基于视觉的多无人机协同拦截系统,用于捕获恶意无人机。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 无人机捕获 协同控制 视觉导航 模型预测控制 分布式估计
📋 核心要点
- 现有方法难以有效应对恶意无人机,本文针对此问题,提出多无人机协同捕获方案。
- 该方案核心在于利用视觉信息进行目标定位与追踪,并采用模型预测控制优化无人机轨迹。
- 实验结果表明,该系统能够成功捕获高速运动的目标无人机,验证了方案的有效性。
📝 摘要(中文)
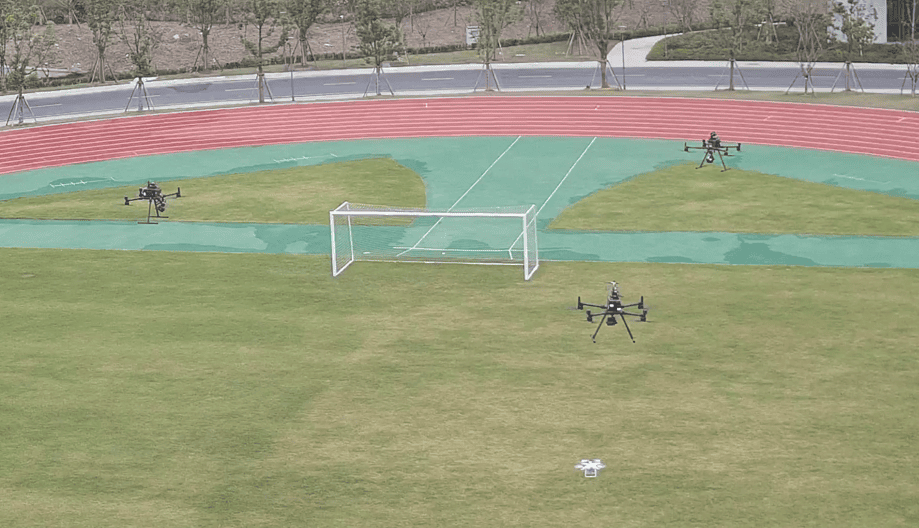
本文提出了一种基于视觉的协同多无人机捕获系统(MCM),该系统利用多个配备机载视觉系统的追逐无人机来检测、定位和追逐目标无人机。为了增强鲁棒性,分布式状态估计和控制框架使追逐无人机能够自主地协调其行动。追逐无人机的轨迹通过模型预测控制(MPC)进行优化,并通过低级SO(3)控制器执行,从而确保平稳稳定的追逐。一旦满足捕获条件,追逐无人机将自动部署飞行网来拦截目标。这些捕获条件是基于对网运动的预测来确定的。为了实现实时决策,我们提出了一种轻量级的计算方法来近似网的运动,避免了求解完整网动力学的高昂成本。通过仿真和实际实验验证了所提出系统的有效性。在实际测试中,我们的方法成功捕获了一个以每秒4米的速度和每平方秒1米的加速度移动的目标,成功率为64.7%。
🔬 方法详解
问题定义:现有方法在物理对抗恶意或滥用无人机方面存在局限性,尤其是在快速移动和具有规避行为的目标面前。直接求解飞行网的动力学方程计算量巨大,难以满足实时性要求。
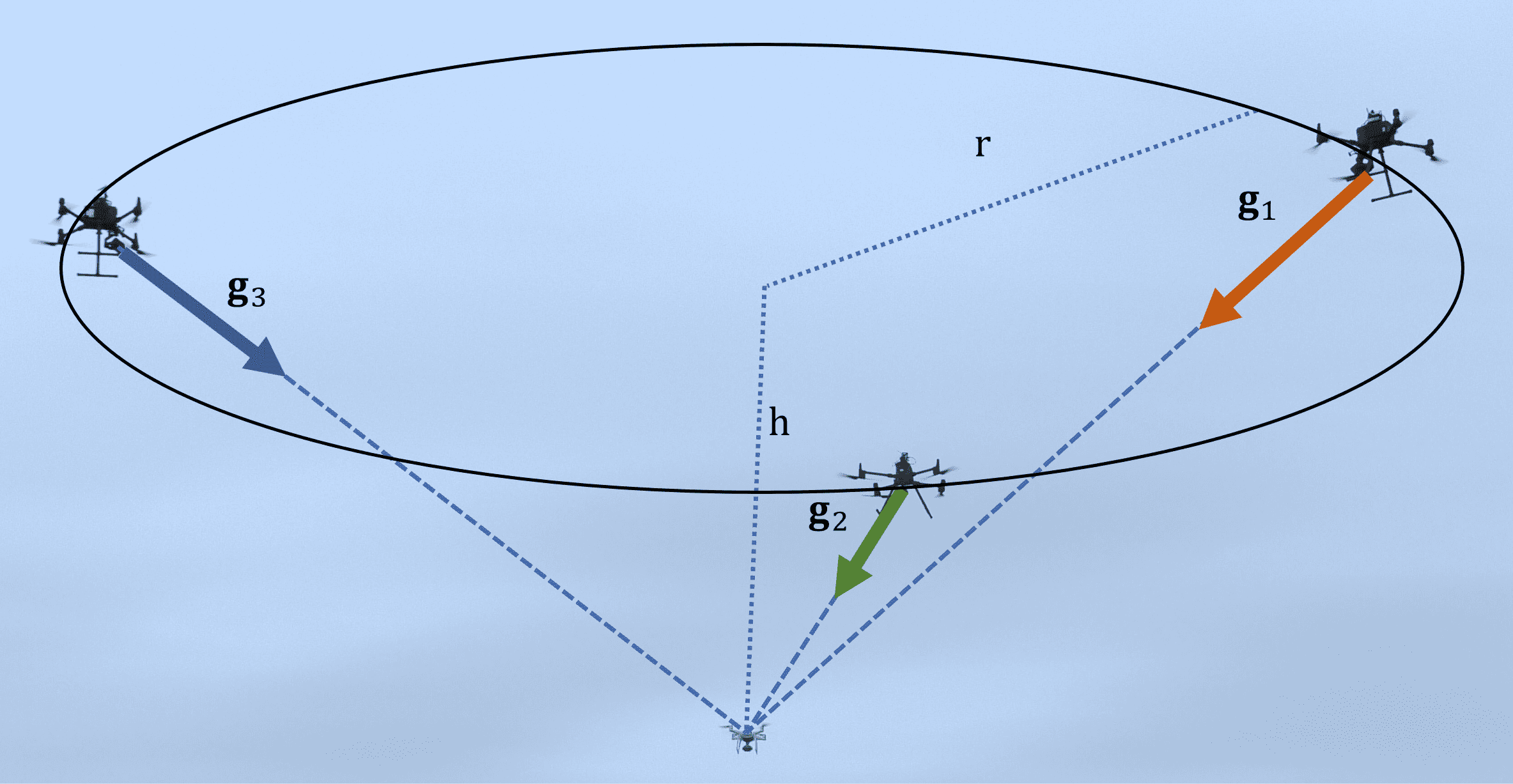
核心思路:利用多个配备视觉系统的追逐无人机协同工作,通过分布式状态估计和控制框架增强系统的鲁棒性。采用模型预测控制(MPC)优化追逐轨迹,并使用轻量级计算方法近似飞行网的运动,从而实现实时捕获。
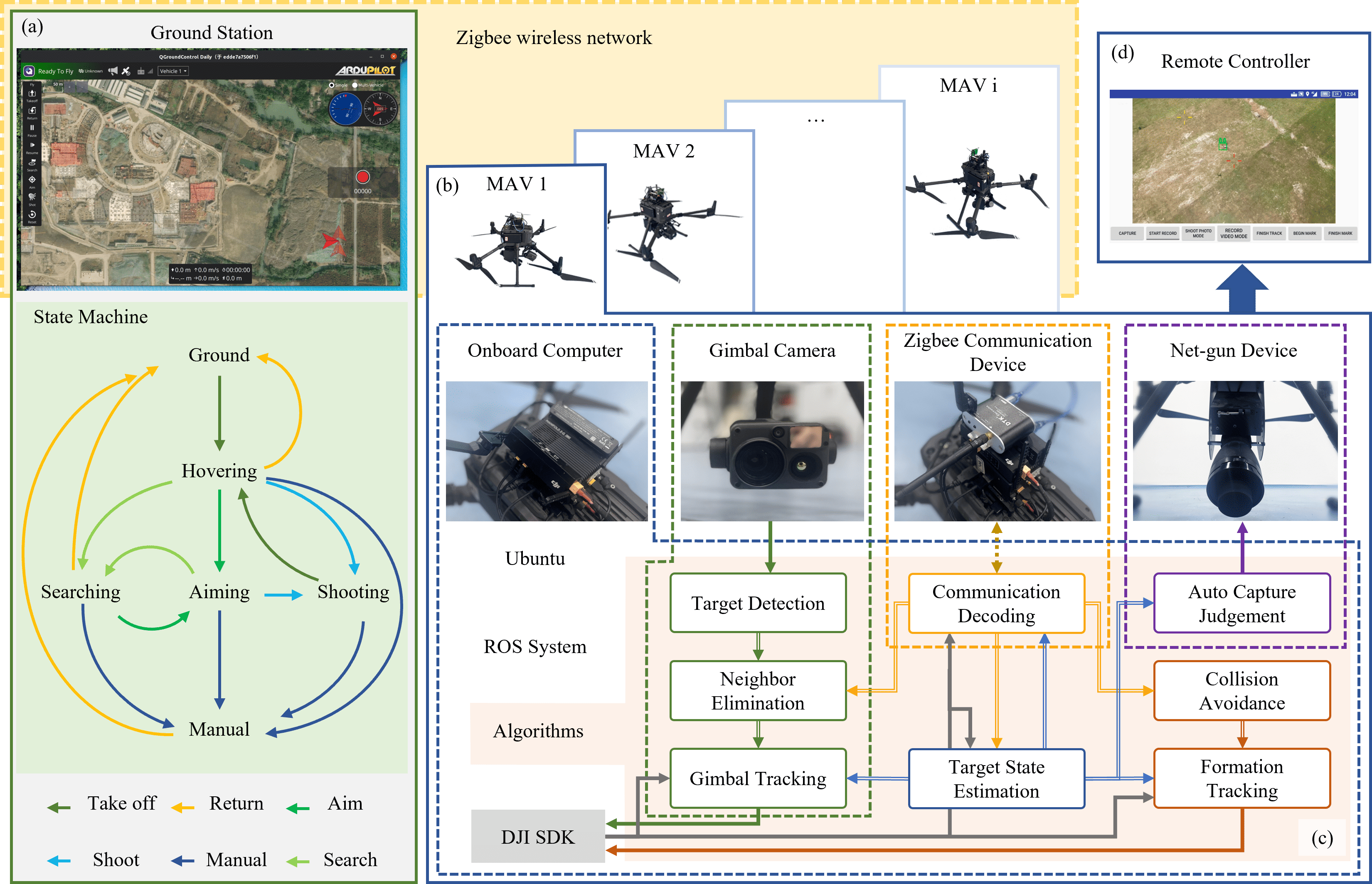
技术框架:该系统包含目标检测与定位模块、分布式状态估计模块、轨迹优化模块(MPC)、低层SO(3)控制模块和飞行网部署模块。追逐无人机首先通过视觉系统检测和定位目标无人机,然后通过分布式状态估计模块融合各无人机的信息,利用MPC生成最优轨迹,最后通过低层控制器执行轨迹并部署飞行网。
关键创新:该方法最大的创新在于提出了一种轻量级的飞行网运动近似方法,避免了求解完整网动力学方程的复杂性,从而实现了实时决策。此外,分布式状态估计和控制框架增强了系统的鲁棒性。
关键设计:模型预测控制(MPC)的设计需要考虑无人机的动力学约束和环境约束,目标函数通常包含追踪误差和控制输入的惩罚项。飞行网运动的近似方法可能基于简化的物理模型或经验模型,需要仔细调整参数以保证精度和计算效率。捕获条件的确定需要综合考虑目标无人机的速度、位置和飞行网的运动状态。
🖼️ 关键图片
📊 实验亮点
在真实环境实验中,该系统成功捕获了以4米/秒的速度和1米/平方秒的加速度移动的目标无人机,捕获成功率达到64.7%。这一结果表明,该系统具有较高的实用价值和鲁棒性,能够在复杂环境中有效工作。
🎯 应用场景
该研究成果可应用于重要区域的无人机防御,例如机场、军事基地和大型活动场所。通过快速捕获非法入侵或恶意无人机,可以有效维护空域安全,防止潜在的安全威胁。未来,该技术还可扩展到其他类型的空中目标拦截任务。
📄 摘要(原文)
MAV-capturing-MAV (MCM) is one of the few effective methods for physically countering misused or malicious MAVs.This paper presents a vision-based cooperative MCM system, where multiple pursuer MAVs equipped with onboard vision systems detect, localize, and pursue a target MAV. To enhance robustness, a distributed state estimation and control framework enables the pursuer MAVs to autonomously coordinate their actions. Pursuer trajectories are optimized using Model Predictive Control (MPC) and executed via a low-level SO(3) controller, ensuring smooth and stable pursuit. Once the capture conditions are satisfied, the pursuer MAVs automatically deploy a flying net to intercept the target. These capture conditions are determined based on the predicted motion of the net. To enable real-time decision-making, we propose a lightweight computational method to approximate the net motion, avoiding the prohibitive cost of solving the full net dynamics. The effectiveness of the proposed system is validated through simulations and real-world experiments. In real-world tests, our approach successfully captures a moving target traveling at 4 meters per second with an acceleration of 1 meter per square second, achieving a success rate of 64.7 percent.