Deep Reinforcement Learning-Based Semi-Autonomous Control for Magnetic Micro-robot Navigation with Immersive Manipulation
作者: Yudong Mao, Dandan Zhang
分类: cs.RO, eess.SY
发布日期: 2025-03-08
备注: Accepted by ICRA
💡 一句话要点
提出基于深度强化学习的半自主控制框架,用于磁微型机器人在沉浸式操作下的导航。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 磁微型机器人 深度强化学习 半自主控制 混合现实 微血管导航
📋 核心要点
- 现有磁微型机器人操控依赖2D显微镜反馈,操作界面不直观,增加了操作员的认知负担。
- 提出基于深度强化学习的半自主控制框架,结合混合现实技术,实现微型机器人的沉浸式操作。
- 实验结果表明,该方法显著提高了导航效率,减少了控制误差,增强了系统鲁棒性。
📝 摘要(中文)
本文提出了一种基于深度强化学习的半自主控制(DRL-SC)框架,用于磁微型机器人在模拟微血管系统中的导航。由于磁微型机器人具有精确的可操作性和小型化等优点,在体内药物递送、无创诊断和基于细胞的疗法等生物医学应用中显示出巨大的潜力。然而,当前的微操作技术通常仅依赖于二维(2D)显微镜视图作为感官反馈,而传统的控制界面不能为操作者提供直观的微型机器人操作方式。这些限制增加了操作者的认知负荷,他们必须解释有限的反馈并将其转化为有效的控制动作。该框架集成了混合现实(MR)技术,以促进微型机器人的沉浸式操作,从而提高情境感知和控制精度。仿真和实验结果表明,该方法显著提高了导航效率,减少了控制误差,并增强了系统在模拟微血管环境中的整体鲁棒性。
🔬 方法详解
问题定义:现有磁微型机器人的控制主要依赖于二维显微图像,操作者需要将有限的视觉信息转化为三维空间中的控制指令,操作难度大,效率低。传统控制界面缺乏直观性,进一步增加了操作者的认知负担,限制了磁微型机器人在复杂环境下的应用。
核心思路:论文的核心思路是利用深度强化学习算法,学习一个能够根据环境状态和操作者指令,自主控制磁微型机器人运动的策略。同时,引入混合现实技术,为操作者提供更直观、沉浸式的操作体验,降低操作难度,提高控制精度。
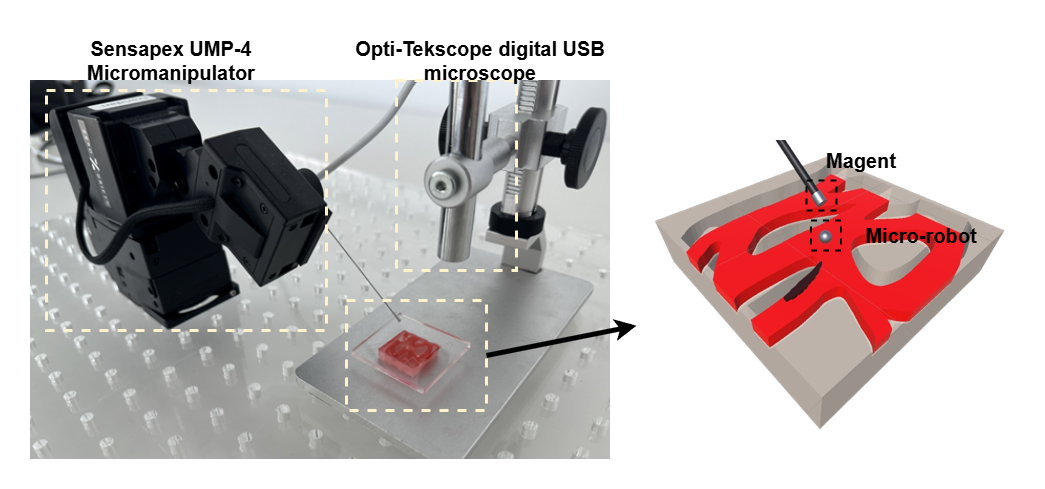
技术框架:该框架主要包含三个模块:环境模拟器、深度强化学习智能体和混合现实交互界面。环境模拟器用于模拟微血管系统,提供机器人运动的物理环境。深度强化学习智能体负责学习最优控制策略,根据环境状态和操作者指令,输出控制信号。混合现实交互界面为操作者提供沉浸式的操作体验,并接收操作者的指令。整体流程是,操作者通过混合现实界面发出指令,智能体根据指令和环境状态生成控制信号,控制机器人在模拟环境中运动,并根据运动结果更新智能体的策略。
关键创新:该方法的主要创新点在于将深度强化学习和混合现实技术相结合,实现磁微型机器人的半自主控制。深度强化学习算法能够自主学习控制策略,降低了对人工经验的依赖。混合现实技术提供了直观的操作界面,降低了操作难度,提高了控制精度。
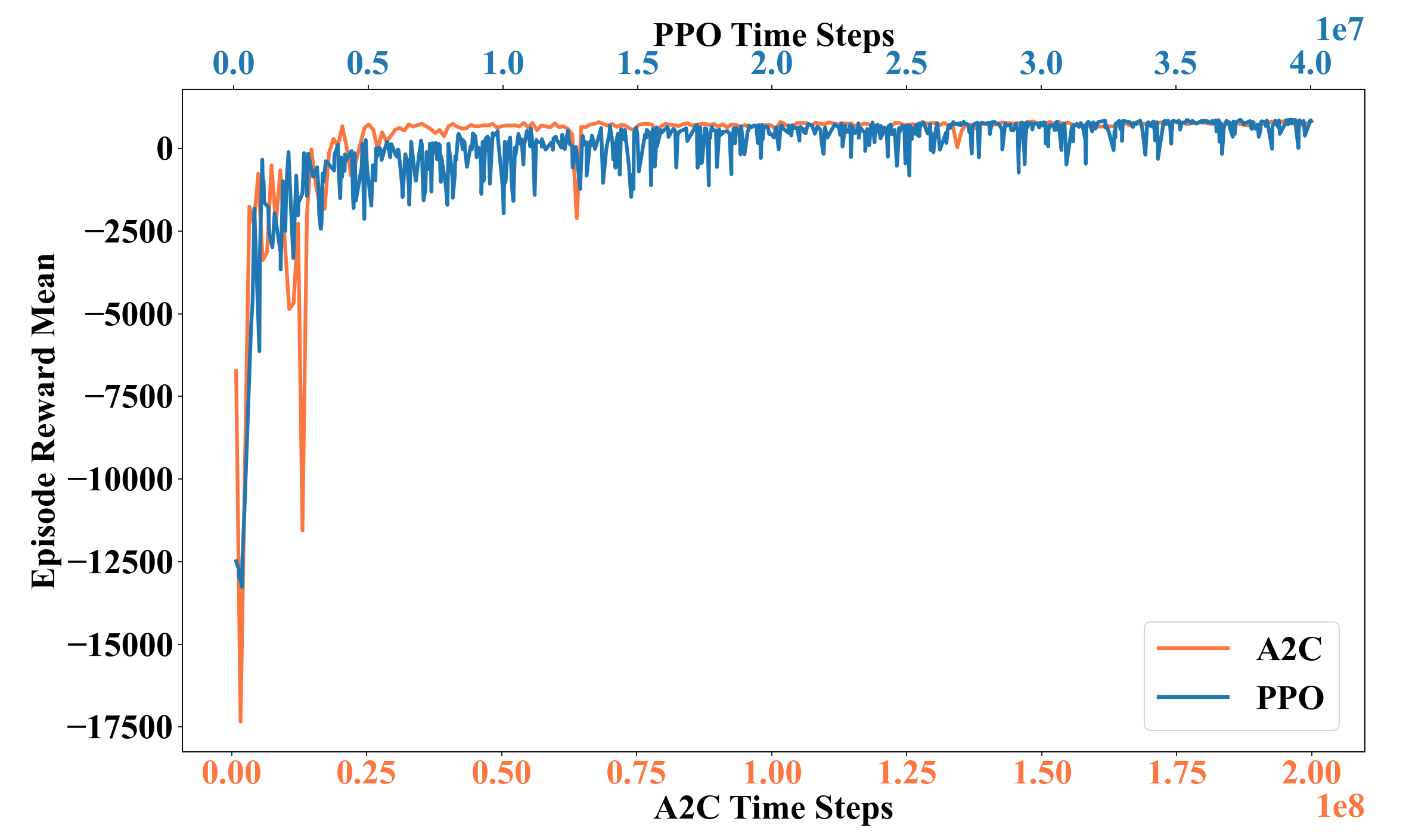
关键设计:深度强化学习智能体采用Actor-Critic架构,Actor网络负责生成控制信号,Critic网络负责评估控制信号的价值。损失函数包括强化学习的奖励函数和模仿学习的损失函数,用于引导智能体学习操作者的控制习惯。混合现实界面采用三维可视化技术,将模拟环境和机器人运动状态实时呈现给操作者。
🖼️ 关键图片

📊 实验亮点
实验结果表明,与传统手动控制方法相比,该方法显著提高了导航效率,减少了控制误差。在模拟微血管环境中,该方法能够使磁微型机器人更准确地到达目标位置,并且具有更强的鲁棒性,能够适应不同的环境变化。具体性能数据未知,但整体提升效果显著。
🎯 应用场景
该研究成果可应用于微创手术、靶向药物递送、细胞治疗等生物医学领域。通过半自主控制和沉浸式操作,医生可以更精确、高效地控制磁微型机器人在体内进行操作,降低手术风险,提高治疗效果。未来,该技术有望应用于更复杂的体内环境,实现更精细的诊断和治疗。
📄 摘要(原文)
Magnetic micro-robots have demonstrated immense potential in biomedical applications, such as in vivo drug delivery, non-invasive diagnostics, and cell-based therapies, owing to their precise maneuverability and small size. However, current micromanipulation techniques often rely solely on a two-dimensional (2D) microscopic view as sensory feedback, while traditional control interfaces do not provide an intuitive manner for operators to manipulate micro-robots. These limitations increase the cognitive load on operators, who must interpret limited feedback and translate it into effective control actions. To address these challenges, we propose a Deep Reinforcement Learning-Based Semi-Autonomous Control (DRL-SC) framework for magnetic micro-robot navigation in a simulated microvascular system. Our framework integrates Mixed Reality (MR) to facilitate immersive manipulation of micro-robots, thereby enhancing situational awareness and control precision. Simulation and experimental results demonstrate that our approach significantly improves navigation efficiency, reduces control errors, and enhances the overall robustness of the system in simulated microvascular environments.