T-CBF: Traversability-based Control Barrier Function to Navigate Vertically Challenging Terrain
作者: Manas Gupta, Xuesu Xiao
分类: cs.RO, cs.AI
发布日期: 2025-03-08 (更新: 2025-08-02)
💡 一句话要点
提出基于可通行性的控制屏障函数,用于垂直复杂地形的机器人安全导航
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 控制屏障函数 可通行性 机器人导航 垂直复杂地形 神经CBF
📋 核心要点
- 现有移动机器人安全研究主要集中于避碰,忽略了在垂直复杂地形中翻车和受困等安全问题。
- 论文提出T-CBF,利用神经CBF学习可通行性相关的安全约束,从而在复杂地形中实现更全面的安全保障。
- 实验结果表明,T-CBF在垂直复杂地形导航中,能显著提升机器人安全性和移动性,性能优于现有方法。
📝 摘要(中文)
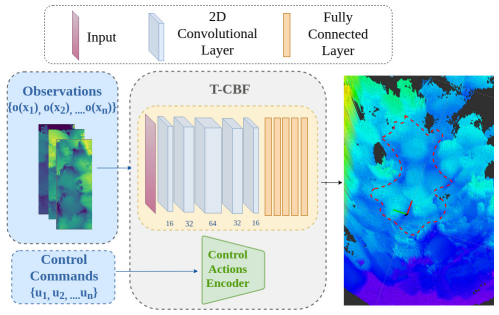
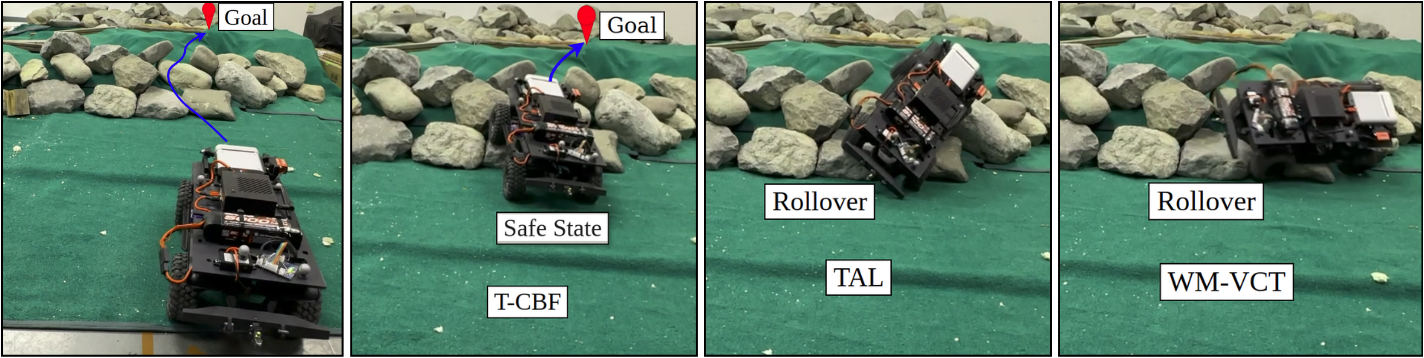
本文提出了一种新颖的基于可通行性的控制屏障函数(T-CBF),利用神经控制屏障函数(CBFs)在非结构化的垂直复杂地形上实现超越避碰的安全。通过考虑可通行性方面的新安全因素,T-CBF能够保证机器人安全。该神经T-CBF基于特定于可通行性安全的观测数据进行训练,用于生成安全轨迹。在仿真和真实的Verti-4 Wheeler (V4W)平台上进行的实验结果表明,T-CBF能够在到达目标位置的同时提供可通行性安全。在真实垂直复杂地形上的导航中,T-CBF规划器在保持机器人安全和移动性方面优于先前开发的规划器30%。
🔬 方法详解
问题定义:论文旨在解决移动机器人在非结构化、垂直复杂地形中导航时,仅考虑避碰而忽略翻车、受困等安全风险的问题。现有方法无法有效应对此类地形带来的安全挑战。
核心思路:论文的核心思路是引入基于可通行性的控制屏障函数(T-CBF),将可通行性作为安全约束纳入控制框架。通过学习安全和不安全的观测数据,T-CBF能够预测地形的可通行性,并生成安全的运动轨迹。
技术框架:T-CBF框架包含以下主要模块:1) 数据采集:收集机器人与地形交互的数据,包括安全和不安全的观测;2) 神经CBF训练:利用收集的数据训练神经控制屏障函数,学习可通行性相关的安全约束;3) 轨迹规划:使用训练好的神经T-CBF生成安全轨迹,引导机器人到达目标位置;4) 运动控制:执行规划的轨迹,并实时调整以应对环境变化。
关键创新:论文的关键创新在于将可通行性概念融入控制屏障函数,使其能够处理垂直复杂地形中的安全问题。与传统的仅考虑避碰的CBF相比,T-CBF能够更全面地评估地形的安全性,并生成更安全的运动轨迹。此外,使用神经CBF能够从数据中学习复杂的安全约束,避免了手动设计的困难。
关键设计:T-CBF的关键设计包括:1) 数据集的构建,需要包含各种地形下的安全和不安全状态;2) 神经CBF的网络结构,需要能够有效地学习可通行性相关的特征;3) 损失函数的设计,需要能够保证CBF的安全性,即确保机器人在安全区域内运动;4) 轨迹规划器的设计,需要能够有效地利用CBF提供的安全约束,生成最优的运动轨迹。具体的参数设置和网络结构在论文中可能有所描述,但此处未知。
🖼️ 关键图片

📊 实验亮点
实验结果表明,T-CBF在真实垂直复杂地形上的导航中,在保持机器人安全和移动性方面优于先前开发的规划器30%。这表明T-CBF能够有效地处理复杂地形中的安全问题,并提高机器人的导航性能。具体的实验设置和指标未知,但30%的提升幅度表明了T-CBF的有效性。
🎯 应用场景
该研究成果可应用于各种需要在复杂地形中安全导航的机器人,例如:火星探测车、搜救机器人、农业机器人、矿业机器人等。通过提高机器人在复杂环境中的安全性和可靠性,可以扩展机器人的应用范围,并降低操作风险。
📄 摘要(原文)
Safety has been of paramount importance in motion planning and control techniques and is an active area of research in the past few years. Most safety research for mobile robots target at maintaining safety with the notion of collision avoidance. However, safety goes beyond just avoiding collisions, especially when robots have to navigate unstructured, vertically challenging, off-road terrain, where vehicle rollover and immobilization is as critical as collisions. In this work, we introduce a novel Traversability-based Control Barrier Function (T-CBF), in which we use neural Control Barrier Functions (CBFs) to achieve safety beyond collision avoidance on unstructured vertically challenging terrain by reasoning about new safety aspects in terms of traversability. The neural T-CBF trained on safe and unsafe observations specific to traversability safety is then used to generate safe trajectories. Furthermore, we present experimental results in simulation and on a physical Verti-4 Wheeler (V4W) platform, demonstrating that T-CBF can provide traversability safety while reaching the goal position. T-CBF planner outperforms previously developed planners by 30\% in terms of keeping the robot safe and mobile when navigating on real world vertically challenging terrain.