MatchMaker: Automated Asset Generation for Robotic Assembly
作者: Yian Wang, Bingjie Tang, Chuang Gan, Dieter Fox, Kaichun Mo, Yashraj Narang, Iretiayo Akinola
分类: cs.RO
发布日期: 2025-03-07 (更新: 2025-03-28)
备注: Accepted to International Conference on Robotics and Automation (ICRA) 2025
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
MatchMaker:用于机器人装配的自动化资产生成,提升多任务学习能力
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱四:生成式动作 (Generative Motion)
关键词: 机器人装配 自动化资产生成 仿真学习 Sim-to-Real 多任务学习
📋 核心要点
- 现有机器人装配任务依赖手动创建装配资产,限制了任务多样性,阻碍了多任务通用智能体的训练。
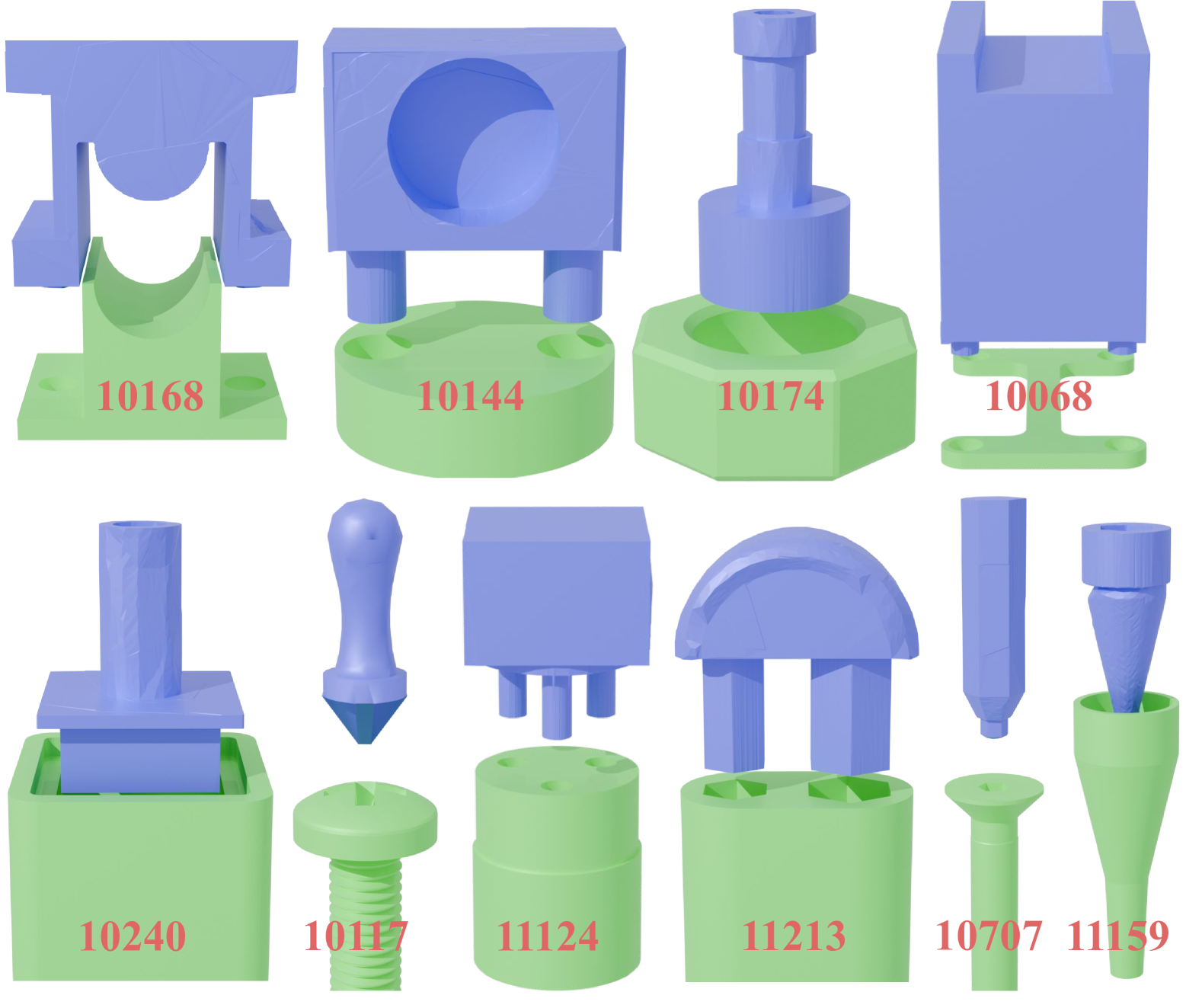
- MatchMaker 提出自动生成仿真兼容的装配资产对的流程,包括修复穿透、生成匹配部件和腐蚀接触面。
- 实验证明,MatchMaker 生成的数据在多样性和有效性方面优于现有方法,提升了下游装配技能学习效果。
📝 摘要(中文)
机器人装配面临视觉感知、功能性抓取、富接触操作和高精度任务等挑战。基于仿真的学习和sim-to-real迁移在解决存在物体姿态变化、感知噪声和控制误差的装配任务中取得了进展。然而,由于需要手动管理装配资产,限制了可用于策略学习的装配问题的数量和多样性,从而阻碍了通用(即多任务)代理在广泛装配任务中的发展。受生成式AI在扩展机器人学习方面的成功启发,我们提出了MatchMaker,一个自动生成多样化、仿真兼容的装配资产对的流程,以促进装配技能的学习。具体来说,MatchMaker可以1)将仿真不兼容、相互穿透的资产对作为输入,自动将其转换为仿真兼容、无穿透的资产对;2)将任意单个资产作为输入,生成一个几何匹配的资产以创建资产对;3)根据用户指定的间隙参数,自动腐蚀(1)或(2)中的接触表面,以生成逼真的零件。实验表明,MatchMaker生成的数据在多样性和下游装配技能学习的有效性方面优于先前的工作。
🔬 方法详解
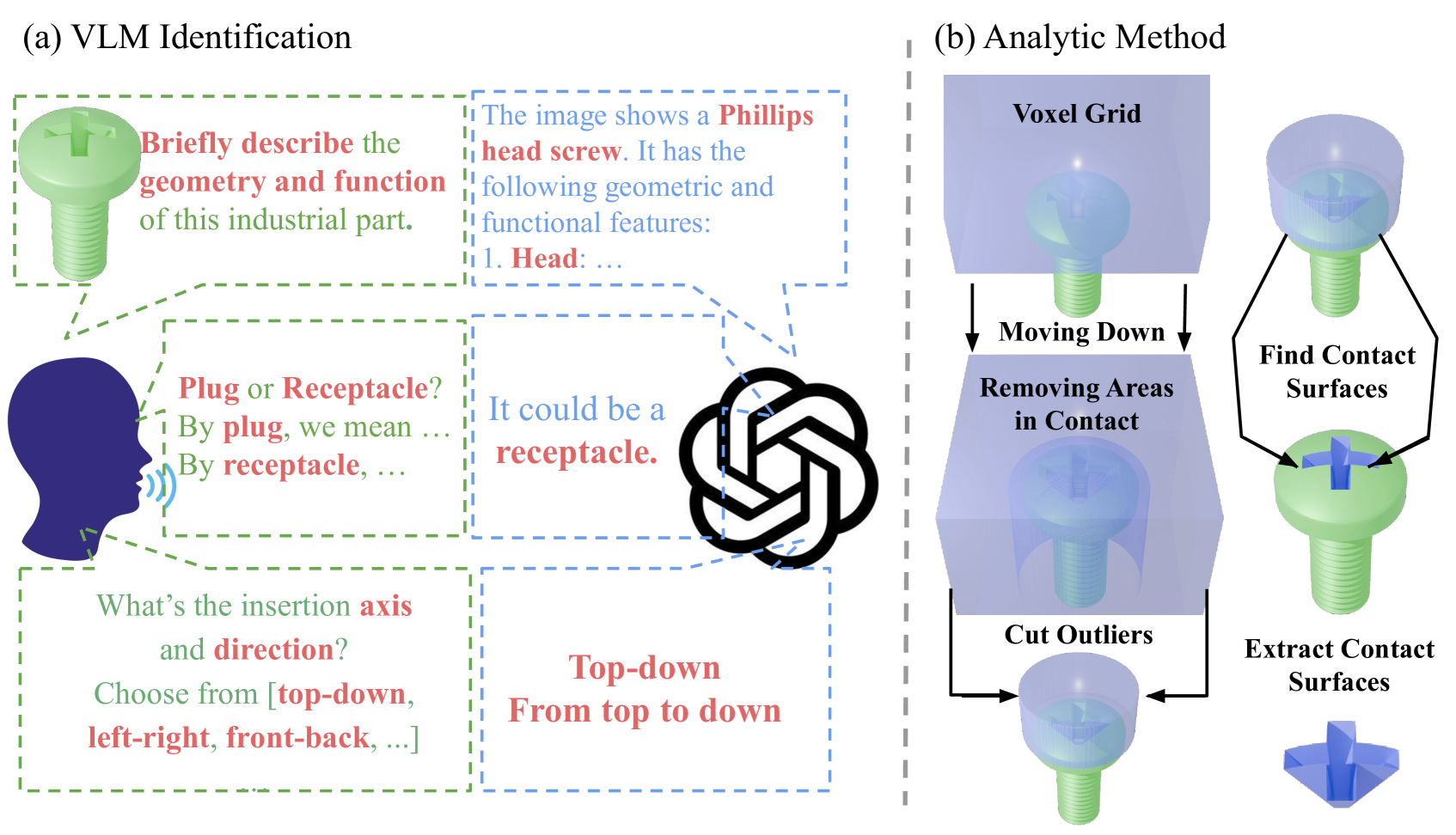
问题定义:机器人装配任务需要大量多样化的装配资产用于训练。然而,手动创建这些资产耗时耗力,并且难以保证资产的仿真兼容性(例如,避免部件间的穿透)。现有方法难以支持多任务学习所需的广泛装配任务。
核心思路:MatchMaker 的核心思路是利用生成式 AI 的能力,自动生成仿真兼容的装配资产对。通过算法自动修复不兼容的资产,并根据单个资产生成匹配的部件,从而大大扩展了可用的训练数据。
技术框架:MatchMaker 包含三个主要模块:1) 资产修复模块,用于将仿真不兼容的资产对转换为仿真兼容的资产对;2) 部件生成模块,用于根据单个资产生成几何匹配的部件;3) 接触面腐蚀模块,用于根据用户指定的间隙参数,自动腐蚀接触表面,以生成更逼真的零件。整个流程可以自动化运行,无需人工干预。
关键创新:MatchMaker 的关键创新在于自动化生成仿真兼容的装配资产对。与传统的手动创建方法相比,MatchMaker 能够显著提高资产生成效率和多样性,从而支持更大规模的多任务学习。
关键设计:资产修复模块可能采用基于几何优化的方法,最小化部件间的穿透深度。部件生成模块可能利用生成对抗网络(GAN)或变分自编码器(VAE)等生成模型,学习部件的几何分布,并生成匹配的部件。接触面腐蚀模块可能采用基于形态学操作的方法,根据间隙参数腐蚀接触表面。
🖼️ 关键图片
📊 实验亮点
实验结果表明,使用 MatchMaker 生成的数据训练的机器人装配模型,在多样性和有效性方面优于使用手动创建的数据训练的模型。具体性能数据未知,但摘要强调了MatchMaker在下游装配技能学习的有效性优于先前工作,表明其生成的数据质量更高,更适合用于训练。
🎯 应用场景
MatchMaker 可应用于机器人装配、自动化生产线设计、虚拟环境构建等领域。通过自动生成多样化的装配资产,可以加速机器人学习和 sim-to-real 迁移,降低开发成本,提高生产效率。该研究有望推动机器人技术在制造业中的广泛应用。
📄 摘要(原文)
Robotic assembly remains a significant challenge due to complexities in visual perception, functional grasping, contact-rich manipulation, and performing high-precision tasks. Simulation-based learning and sim-to-real transfer have led to recent success in solving assembly tasks in the presence of object pose variation, perception noise, and control error; however, the development of a generalist (i.e., multi-task) agent for a broad range of assembly tasks has been limited by the need to manually curate assembly assets, which greatly constrains the number and diversity of assembly problems that can be used for policy learning. Inspired by recent success of using generative AI to scale up robot learning, we propose MatchMaker, a pipeline to automatically generate diverse, simulation-compatible assembly asset pairs to facilitate learning assembly skills. Specifically, MatchMaker can 1) take a simulation-incompatible, interpenetrating asset pair as input, and automatically convert it into a simulation-compatible, interpenetration-free pair, 2) take an arbitrary single asset as input, and generate a geometrically-mating asset to create an asset pair, 3) automatically erode contact surfaces from (1) or (2) according to a user-specified clearance parameter to generate realistic parts. We demonstrate that data generated by MatchMaker outperforms previous work in terms of diversity and effectiveness for downstream assembly skill learning. For videos and additional details, please see our project website: https://wangyian-me.github.io/MatchMaker/.