Kinodynamic Model Predictive Control for Energy Efficient Locomotion of Legged Robots with Parallel Elasticity
作者: Yulun Zhuang, Yichen Wang, Yanran Ding
分类: cs.RO, eess.SY
发布日期: 2025-03-07
备注: 7 pages, 6 figures. Accepted for publication at ICRA 2025
💡 一句话要点
提出基于动理学的模型预测控制,利用并联弹性元件提升腿式机器人能量效率
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 腿式机器人 模型预测控制 动理学 能量效率 并联弹性 单向弹簧 动态运动
📋 核心要点
- 现有腿式机器人运动控制方法在能量效率方面存在不足,尤其是在动态运动中电机扭矩峰值较高,导致能量消耗大。
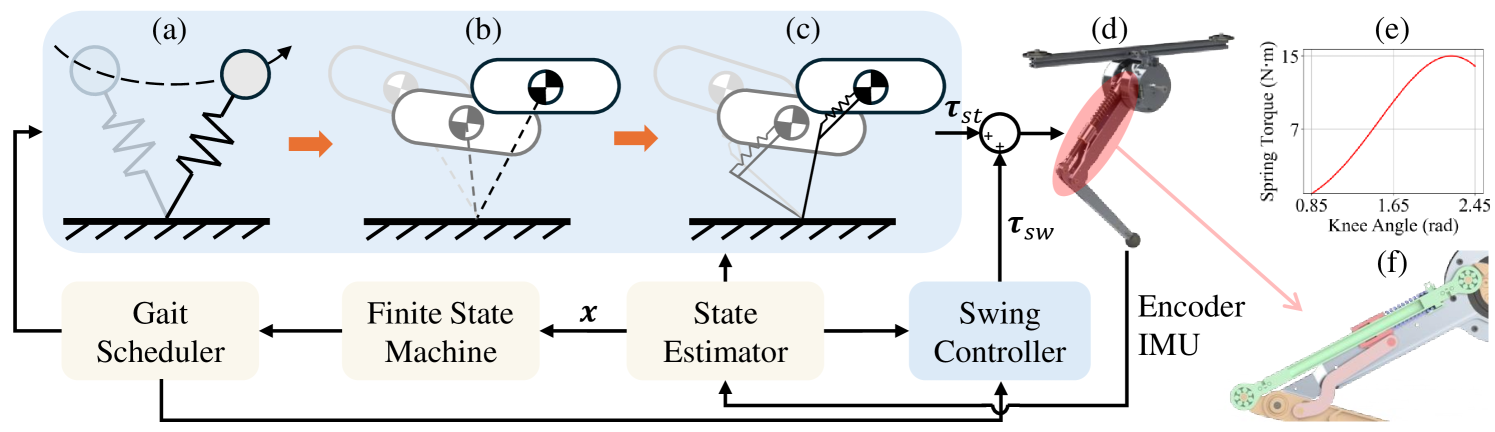
- 论文提出利用单向并联弹簧(UPS)来减少站立阶段的电机扭矩峰值,并设计了分层动理学模型预测控制(MPC)框架。
- 仿真结果显示,配备UPS的单腿机器人在高速跳跃时运输成本降低38.8%,初步硬件实验表明能量消耗降低14.8%。
📝 摘要(中文)
本文提出了一种基于动理学的模型预测控制(MPC)框架,该框架利用单向并联弹簧(UPS)来提高动态腿式机器人的能量效率。该方法采用分层控制结构,其中具有简化动力学模型的MPC解被用作动理学MPC的热启动,该动理学MPC考虑了非线性质心动力学和运动学约束。所提出的方法通过使用UPS来减少站立阶段的峰值电机扭矩和能量消耗,从而实现腿式机器人的能量高效动态跳跃。仿真结果表明,配备UPS的单腿机器人在高速跳跃期间的运输成本(CoT)降低了38.8%。此外,初步的硬件实验表明能量消耗降低了14.8%。
🔬 方法详解
问题定义:腿式机器人在动态运动中,电机需要提供较大的扭矩以克服冲击和维持平衡,这导致能量消耗较高。尤其是在站立阶段,电机扭矩峰值显著,成为能量效率的瓶颈。现有控制方法难以有效利用被动元件(如弹簧)来降低电机负荷,从而限制了能量效率的提升。
核心思路:论文的核心思路是利用单向并联弹簧(UPS)与电机并联,在站立阶段吸收冲击能量并辅助提供支撑力,从而降低电机所需的峰值扭矩。同时,设计动理学模型预测控制(MPC)框架,优化机器人的运动轨迹,充分发挥UPS的能量存储和释放特性,实现能量高效的动态运动。
技术框架:该方法采用分层控制结构。首先,使用简化的动力学模型进行MPC控制,得到粗略的运动轨迹。然后,将该轨迹作为动理学MPC的热启动,动理学MPC考虑了非线性质心动力学和运动学约束,对运动轨迹进行精细优化。动理学MPC的输出直接控制机器人的电机,从而实现能量高效的动态运动。
关键创新:该论文的关键创新在于将单向并联弹簧(UPS)与动理学MPC相结合,用于腿式机器人的能量高效运动控制。与传统的控制方法相比,该方法能够更有效地利用被动元件的能量存储和释放特性,从而降低电机负荷和能量消耗。此外,分层控制结构也提高了计算效率和控制性能。
关键设计:在动理学MPC中,目标函数可能包含对运输成本(CoT)的最小化项,以及对电机扭矩的惩罚项。约束条件包括机器人的运动学约束、动力学约束以及环境约束(如地面反作用力约束)。单向并联弹簧的刚度和预压缩量是关键参数,需要根据具体的机器人和运动任务进行优化。热启动策略对于MPC的收敛速度和性能至关重要。
🖼️ 关键图片


📊 实验亮点
仿真结果表明,配备UPS的单腿机器人在高速跳跃期间,运输成本(CoT)降低了38.8%。初步的硬件实验也验证了该方法的有效性,能量消耗降低了14.8%。这些结果表明,该方法在提高腿式机器人能量效率方面具有显著优势。
🎯 应用场景
该研究成果可应用于各种腿式机器人,尤其是在需要长时间自主运动或高能量效率的场景中,如搜救机器人、巡检机器人、物流机器人等。通过降低能量消耗,可以延长机器人的续航时间,提高其在复杂环境中的适应能力。此外,该方法也有助于开发更轻量化、更灵活的腿式机器人。
📄 摘要(原文)
In this paper, we introduce a kinodynamic model predictive control (MPC) framework that exploits unidirectional parallel springs (UPS) to improve the energy efficiency of dynamic legged robots. The proposed method employs a hierarchical control structure, where the solution of MPC with simplified dynamic models is used to warm-start the kinodynamic MPC, which accounts for nonlinear centroidal dynamics and kinematic constraints. The proposed approach enables energy efficient dynamic hopping on legged robots by using UPS to reduce peak motor torques and energy consumption during stance phases. Simulation results demonstrated a 38.8% reduction in the cost of transport (CoT) for a monoped robot equipped with UPS during high-speed hopping. Additionally, preliminary hardware experiments show a 14.8% reduction in energy consumption. Video: https://youtu.be/AF11qMXJD48