BEHAVIOR Robot Suite: Streamlining Real-World Whole-Body Manipulation for Everyday Household Activities
作者: Yunfan Jiang, Ruohan Zhang, Josiah Wong, Chen Wang, Yanjie Ze, Hang Yin, Cem Gokmen, Shuran Song, Jiajun Wu, Li Fei-Fei
分类: cs.RO, cs.AI, cs.CV, cs.LG
发布日期: 2025-03-07 (更新: 2025-08-24)
备注: 9th Conference on Robot Learning (CoRL 2025), Seoul, Korea. Project website: https://behavior-robot-suite.github.io/
💡 一句话要点
BEHAVIOR Robot Suite:为日常家庭活动简化真实世界全身操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 全身操作 家庭机器人 视觉运动策略 机器人学习 遥操作
📋 核心要点
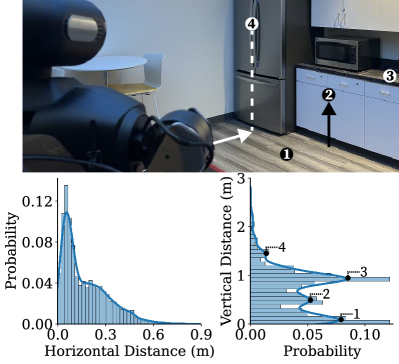
- 现有机器人benchmark在全身控制能力(双手协调、导航、可达性)方面存在不足,难以应对复杂家庭任务。
- 提出BEHAVIOR Robot Suite (BRS),通过软硬件结合的方式,简化全身操作的学习和控制。
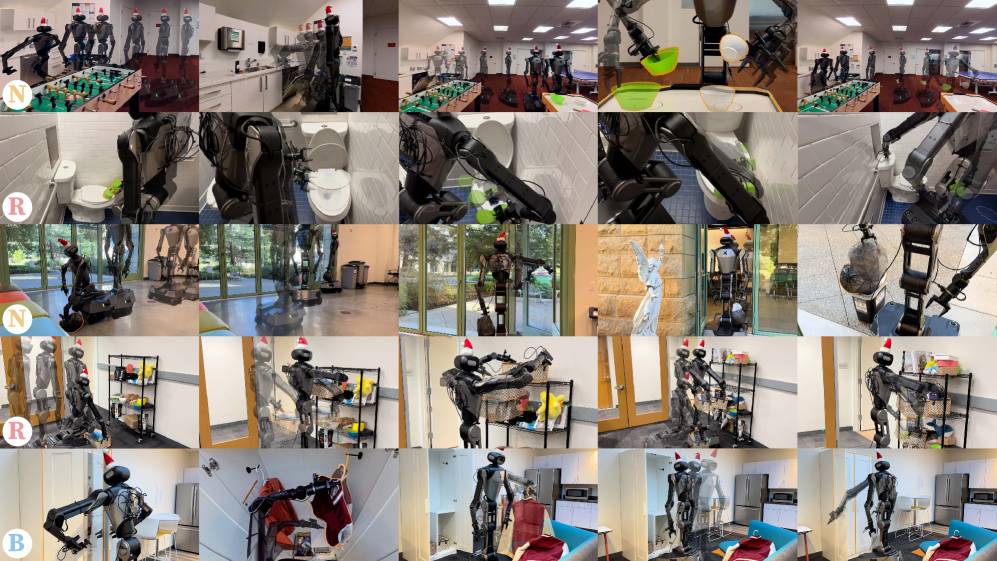
- BRS在五个家庭任务中进行了评估,验证了其在长距离导航、物体交互和狭小空间操作方面的有效性。
📝 摘要(中文)
移动操作机器人面临着真实家庭任务的巨大挑战。对现有机器人基准的分析表明,成功的任务表现取决于三个关键的全身控制能力:双手协调、稳定精确的导航和广泛的末端执行器可达性。实现这些能力需要仔细的硬件设计,但由此产生的系统复杂性进一步复杂化了视觉运动策略学习。为了应对这些挑战,我们推出了BEHAVIOR Robot Suite (BRS),这是一个全面的框架,用于在各种家庭任务中进行全身操作。BRS建立在一个具有4自由度躯干的双臂轮式机器人上,集成了经济高效的全身遥操作界面用于数据收集,以及一种用于学习全身视觉运动策略的新算法。我们在五个具有挑战性的家庭任务中评估了BRS,这些任务不仅强调了三个核心能力,还引入了额外的复杂性,例如长距离导航、与铰接和可变形物体的交互以及在狭小空间中的操作。我们相信BRS集成的机器人实体、数据收集界面和学习框架标志着在实现日常家庭任务的真实全身操作方面迈出了重要一步。BRS已开源。
🔬 方法详解
问题定义:现有移动操作机器人难以胜任复杂的家庭任务,主要瓶颈在于缺乏有效的全身控制能力,包括双手协调、稳定导航和末端执行器可达性。现有的benchmark和方法难以同时满足这些需求,并且系统复杂性使得视觉运动策略学习更加困难。
核心思路:BRS的核心思路是提供一个软硬件结合的平台,通过精心设计的机器人本体、经济高效的遥操作界面和创新的学习算法,简化全身操作的学习和控制过程。通过这种方式,可以更容易地收集高质量的数据,并训练出能够应对复杂家庭任务的视觉运动策略。
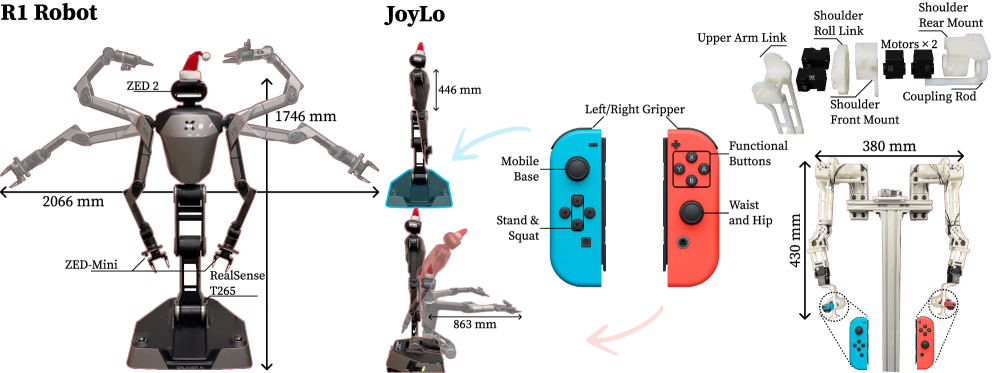
技术框架:BRS包含三个主要组成部分:1) 机器人本体:一个具有4自由度躯干的双臂轮式机器人,旨在提供足够的灵活性和可达性;2) 数据收集界面:一个经济高效的全身遥操作界面,用于收集高质量的训练数据;3) 学习算法:一种用于学习全身视觉运动策略的新算法,该算法能够利用收集到的数据进行训练。整体流程是从遥操作收集数据,然后使用这些数据训练视觉运动策略,最后在真实机器人上进行部署和评估。
关键创新:BRS的关键创新在于其集成的软硬件设计,以及针对全身操作的优化。具体来说,遥操作界面的设计使得数据收集更加高效和便捷,而学习算法则能够有效地利用这些数据来学习复杂的视觉运动策略。此外,BRS还关注于解决家庭任务中的一些特殊挑战,例如长距离导航、物体交互和狭小空间操作。
关键设计:BRS的机器人本体采用了双臂设计,并配备了4自由度的躯干,以提供更大的操作空间和灵活性。遥操作界面采用了全身控制的方式,使得操作员能够直观地控制机器人的各个关节。学习算法的具体细节未知,但推测可能采用了模仿学习或强化学习等方法,并针对全身操作进行了优化。
🖼️ 关键图片
📊 实验亮点
BRS在五个具有挑战性的家庭任务中进行了评估,包括长距离导航、与铰接和可变形物体的交互以及在狭小空间中的操作。虽然论文中没有提供具体的性能数据,但实验结果表明BRS能够有效地解决这些任务,并展现出良好的泛化能力。该研究为全身操作机器人的发展提供了一个有价值的平台和基准。
🎯 应用场景
该研究成果可应用于家庭服务机器人、医疗辅助机器人等领域,帮助机器人更好地完成日常任务,例如清洁、整理、物品递送等。通过提升机器人的全身操作能力,可以显著提高其在复杂环境中的适应性和实用性,从而更好地服务于人类生活。
📄 摘要(原文)
Real-world household tasks present significant challenges for mobile manipulation robots. An analysis of existing robotics benchmarks reveals that successful task performance hinges on three key whole-body control capabilities: bimanual coordination, stable and precise navigation, and extensive end-effector reachability. Achieving these capabilities requires careful hardware design, but the resulting system complexity further complicates visuomotor policy learning. To address these challenges, we introduce the BEHAVIOR Robot Suite (BRS), a comprehensive framework for whole-body manipulation in diverse household tasks. Built on a bimanual, wheeled robot with a 4-DoF torso, BRS integrates a cost-effective whole-body teleoperation interface for data collection and a novel algorithm for learning whole-body visuomotor policies. We evaluate BRS on five challenging household tasks that not only emphasize the three core capabilities but also introduce additional complexities, such as long-range navigation, interaction with articulated and deformable objects, and manipulation in confined spaces. We believe that BRS's integrated robotic embodiment, data collection interface, and learning framework mark a significant step toward enabling real-world whole-body manipulation for everyday household tasks. BRS is open-sourced at https://behavior-robot-suite.github.io/