Generalizing Robot Trajectories from Single-Context Human Demonstrations: A Probabilistic Approach
作者: Qian Ying Lee, Suhas Raghavendra Kulkarni, Kenzhi Iskandar Wong, Lin Yang, Bernardo Noronha, Yongjun Wee, Domenico Campolo
分类: cs.RO
发布日期: 2025-03-07 (更新: 2025-11-07)
💡 一句话要点
提出基于GMM的轨迹泛化方法,从单上下文演示中学习机器人轨迹
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模仿学习 机器人轨迹泛化 高斯混合模型 高斯混合回归 单次示教
📋 核心要点
- 现有模仿学习方法在单场景示教下难以泛化到新场景,尤其是在起始和目标配置变化时。
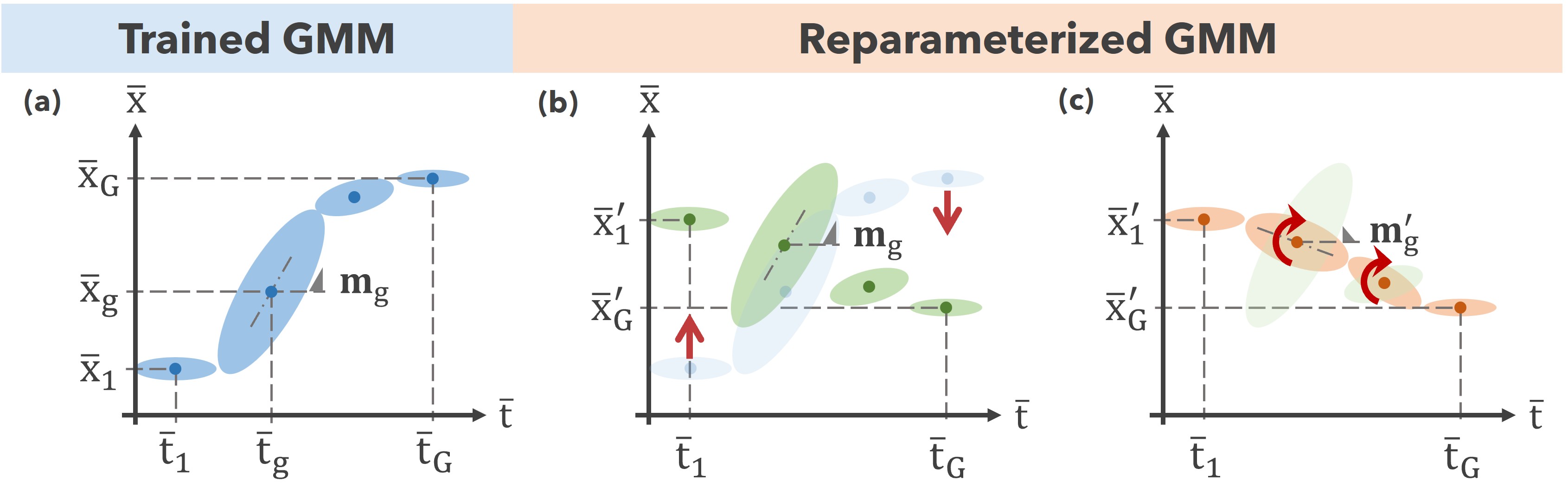
- 该方法通过GMM组件级重参数化,自适应调整均值和协方差,再用GMR生成轨迹,实现轨迹泛化。
- 实验表明,该方法在轨迹成功率和保真度上显著优于基线,即使在平移和旋转变化下也能保持准确。
📝 摘要(中文)
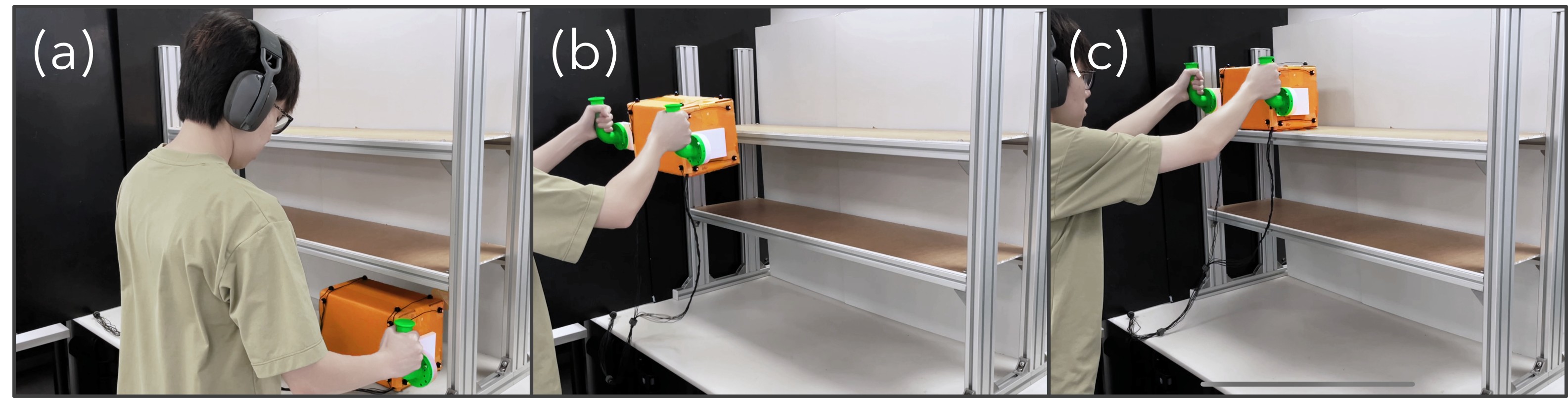
本文提出了一种基于高斯混合模型(GMM)的创新方法,旨在从单上下文的人工示教中泛化机器人轨迹到新的场景。该方法通过对GMM进行组件级别的重参数化,自适应地调整均值向量和协方差矩阵,然后利用高斯混合回归(GMR)生成平滑的轨迹。在双臂抓取放置任务中,针对不同箱子位置进行了评估,并与多个基线方法进行比较。实验结果表明,该方法在轨迹成功率和保真度方面显著优于基线方法,即使在任务配置的平移和旋转组合变化下,也能保持准确性。结果表明,该方法能有效地进行泛化,同时确保边界收敛并保留演示运动的内在结构。
🔬 方法详解
问题定义:论文旨在解决从单次人工示教中学习机器人轨迹,并将其泛化到具有不同起始和目标配置的新环境中的问题。现有的模仿学习方法通常需要多次示教或难以适应新的上下文,尤其是在只有单一上下文的示教数据可用时,泛化能力受到限制。
核心思路:论文的核心思路是利用高斯混合模型(GMM)对示教轨迹进行建模,并通过对GMM的组件进行重参数化,使其能够适应新的起始和目标配置。这种方法能够保留示教轨迹的内在结构,同时允许对轨迹进行平滑的调整,以满足新的约束条件。
技术框架:该方法主要包含以下几个阶段:1) 使用GMM对单次示教轨迹进行建模,得到一系列高斯分量。2) 对GMM的每个高斯分量进行重参数化,使其能够适应新的起始和目标配置。具体来说,通过调整每个高斯分量的均值向量和协方差矩阵来实现。3) 使用高斯混合回归(GMR)从重参数化后的GMM中生成新的轨迹。GMR利用条件概率分布,根据新的起始状态预测后续的状态序列,从而生成完整的轨迹。
关键创新:该方法最关键的创新点在于GMM的组件级重参数化。传统的GMM方法通常只关注均值向量的调整,而忽略了协方差矩阵的重要性。该方法同时调整均值向量和协方差矩阵,使得GMM能够更好地适应新的上下文,从而提高轨迹的泛化能力。此外,该方法只需要单次示教,降低了对示教数据的需求。
关键设计:在GMM建模阶段,需要选择合适的高斯分量数量。在重参数化阶段,需要设计合适的调整策略,以确保轨迹的平滑性和准确性。在GMR阶段,需要选择合适的回归参数,以平衡轨迹的探索性和利用性。论文中可能涉及具体的参数调整公式和策略,但摘要中未详细说明。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在双臂抓取放置任务中,轨迹成功率和保真度显著优于基线方法。即使在任务配置的平移和旋转组合变化下,也能保持较高的准确性。具体性能数据和提升幅度在摘要中未给出,但强调了该方法在泛化能力方面的优势。
🎯 应用场景
该研究成果可应用于各种机器人操作任务,例如装配、抓取放置、焊接等。通过单次人工示教,机器人可以快速学习并适应新的工作环境和任务配置,降低了机器人部署和编程的成本。该方法在自动化生产线、服务机器人等领域具有广泛的应用前景,有助于提高生产效率和服务质量。
📄 摘要(原文)
Generalizing robot trajectories from human demonstrations to new contexts remains a key challenge in Learning from Demonstration (LfD), particularly when only single-context demonstrations are available. We present a novel Gaussian Mixture Model (GMM)-based approach that enables systematic generalization from single-context demonstrations to a wide range of unseen start and goal configurations. Our method performs component-level reparameterization of the GMM, adapting both mean vectors and covariance matrices, followed by Gaussian Mixture Regression (GMR) to generate smooth trajectories. We evaluate the approach on a dual-arm pick-and-place task with varying box placements, comparing against several baselines. Results show that our method significantly outperforms baselines in trajectory success and fidelity, maintaining accuracy even under combined translational and rotational variations of task configurations. These results demonstrate that our method generalizes effectively while ensuring boundary convergence and preserving the intrinsic structure of demonstrated motions.