Design, Dynamic Modeling and Control of a 2-DOF Robotic Wrist Actuated by Twisted and Coiled Actuators
作者: Yunsong Zhang, Xinyu Zhou, Feitian Zhang
分类: cs.RO, eess.SY
发布日期: 2025-03-07 (更新: 2025-07-30)
💡 一句话要点
提出基于扭曲缠绕驱动器的2自由度机器人腕部设计与动态模型控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 机器人腕部 扭曲缠绕驱动器 动态建模 非线性模型预测控制
📋 核心要点
- 现有软体机器人缺乏针对多自由度配置的动态模型控制策略,限制了其应用。
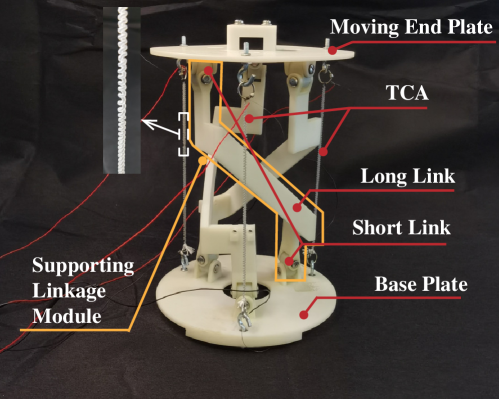
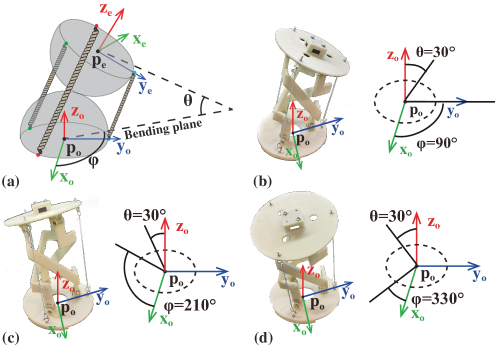
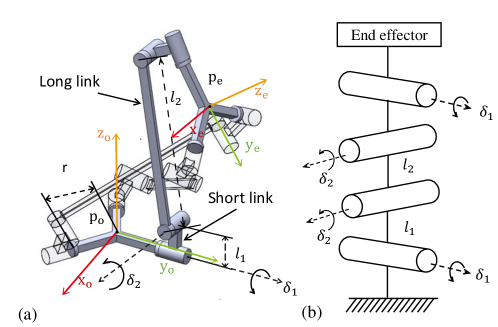
- 设计了一种基于TCA驱动的2自由度机器人腕部,并建立了精确的拉格朗日动态模型。
- 实验验证了所提出的动态模型和NMPC控制器的有效性,并成功集成到多段软体机器人手臂中。
📝 摘要(中文)
本文提出了一种新型的2自由度机器人腕部设计,旨在为人工肌肉驱动的模块化软体机器人提供基础构建模块。该腕部由扭曲缠绕驱动器(TCA)驱动,并采用紧凑的3RRRR并联机构,实现了轻量化结构和增强的运动能力。论文建立了一个全面的拉格朗日动态模型,以捕捉该模块复杂的非线性行为。基于此模型,设计了一种非线性模型预测控制器(NMPC),以确保精确的轨迹跟踪。通过物理原型验证了其运动性能和动态模型的准确性。在各种工况下,对NMPC和传统PID控制器进行了对比评估,实验结果表明,基于动态模型的控制方法在管理TCA驱动的机器人腕部运动方面具有有效性和鲁棒性。最后,为了展示其实用性和集成性,将该腕部模块集成到多段软体机器人手臂中,并成功执行了轨迹跟踪任务。
🔬 方法详解
问题定义:现有的人工肌肉驱动软体机器人,尤其是在多自由度配置下,缺乏有效的动态模型和控制策略,难以实现精确的运动控制。这限制了它们在复杂任务中的应用,例如精细操作和复杂环境下的导航。传统的控制方法,如PID控制,难以处理软体机器人复杂的非线性动态特性。
核心思路:本文的核心思路是建立一个精确的机器人腕部动态模型,并基于该模型设计一个非线性模型预测控制器(NMPC)。通过精确的动态模型,可以预测腕部的未来状态,并优化控制输入,从而实现精确的轨迹跟踪。采用TCA驱动和3RRRR并联机构,旨在实现轻量化和高运动性能。
技术框架:该研究的技术框架主要包括以下几个阶段:1) 机器人腕部设计:设计基于TCA驱动的2自由度机器人腕部,采用3RRRR并联机构。2) 动态建模:利用拉格朗日方法建立腕部的动态模型,考虑了TCA的非线性特性。3) 控制器设计:基于动态模型设计NMPC控制器,实现轨迹跟踪。4) 实验验证:制作物理原型,进行实验验证,包括运动性能测试、模型验证和控制器性能评估。5) 系统集成:将腕部模块集成到多段软体机器人手臂中,验证其集成性和实用性。
关键创新:该论文的关键创新在于:1) 提出了一种新型的基于TCA驱动的2自由度机器人腕部设计,具有轻量化和高运动性能的特点。2) 建立了一个全面的拉格朗日动态模型,能够准确地描述腕部的非线性动态特性。3) 设计了一种基于动态模型的NMPC控制器,能够实现精确的轨迹跟踪,并具有良好的鲁棒性。
关键设计:在动态建模方面,需要精确地确定腕部的几何参数、质量参数和TCA的力学特性。在NMPC控制器设计方面,需要选择合适的预测时域、控制时域和代价函数。代价函数通常包括跟踪误差和控制输入的惩罚项。此外,还需要考虑控制器的计算效率,以满足实时控制的要求。
🖼️ 关键图片
📊 实验亮点
实验结果表明,所提出的动态模型能够准确地描述机器人腕部的运动特性。NMPC控制器在轨迹跟踪任务中表现出优异的性能,与传统的PID控制器相比,跟踪误差显著降低。此外,将该腕部模块集成到多段软体机器人手臂中,并成功执行了轨迹跟踪任务,验证了其集成性和实用性。具体的性能数据(例如,跟踪误差的降低幅度)需要在论文中查找。
🎯 应用场景
该研究成果可应用于医疗机器人、康复机器人、工业自动化等领域。例如,在微创手术中,该腕部可以作为手术机器人的末端执行器,实现精确的操作。在康复训练中,可以帮助患者进行精细的运动训练。在工业自动化中,可以用于执行复杂的装配任务。未来,该技术有望推动软体机器人在更多领域的应用。
📄 摘要(原文)
Artificial muscle-driven modular soft robots exhibit significant potential for executing complex tasks. However, their broader applicability remains constrained by the lack of dynamic model-based control strategies tailored for multi-degree-of-freedom (DOF) configurations. This paper presents a novel design of a 2-DOF robotic wrist, envisioned as a fundamental building block for such advanced robotic systems. The wrist module is actuated by twisted and coiled actuators (TCAs) and utilizes a compact 3RRRR parallel mechanism to achieve a lightweight structure with enhanced motion capability. A comprehensive Lagrangian dynamic model is developed to capture the module's complex nonlinear behavior. Leveraging this model, a nonlinear model predictive controller (NMPC) is designed to ensure accurate trajectory tracking. A physical prototype of the robotic wrist is fabricated, and extensive experiments are performed to validate its motion performance and the fidelity of the proposed dynamic model. Subsequently, comparative evaluations between the NMPC and a conventional PID controller are conducted under various operating conditions. Experimental results demonstrate the effectiveness and robustness of the dynamic model-based control approach in managing the motion of TCA-driven robotic wrists. Finally, to illustrate its practical utility and integrability, the wrist module is incorporated into a multi-segment soft robotic arm, where it successfully executes a trajectory tracking task.