Tiny LiDARs for Manipulator Self-Awareness: Sensor Characterization and Initial Localization Experiments
作者: Giammarco Caroleo, Alessandro Albini, Daniele De Martini, Timothy D. Barfoot, Perla Maiolino
分类: cs.RO
发布日期: 2025-03-05 (更新: 2025-07-31)
备注: 7 pages, 6 figures, 3 tables, IEEE/RSJ International Conference on Intelligent Robots and Systems 2025 accepted paper
💡 一句话要点
利用微型激光雷达实现机械臂自感知目标定位
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 微型激光雷达 机械臂自感知 目标定位 概率传感器模型 粒子滤波
📋 核心要点
- 现有方法在机械臂目标定位中缺乏对微型激光雷达传感器特性精确建模,导致定位精度受限。
- 论文提出了一种概率传感器模型,能够有效校准传感器读数与目标相对距离和方向的依赖关系。
- 实验结果表明,该传感器模型在目标物体定位任务中,相较于传统方法,性能得到了显著提升。
📝 摘要(中文)
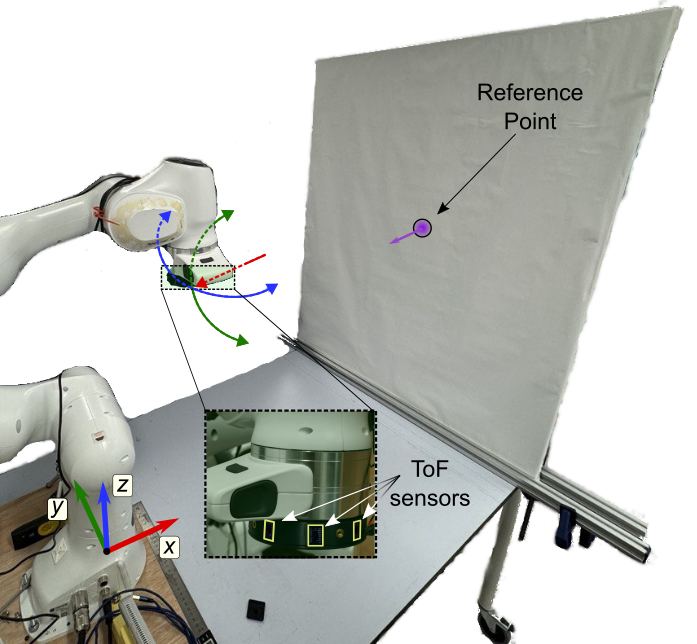
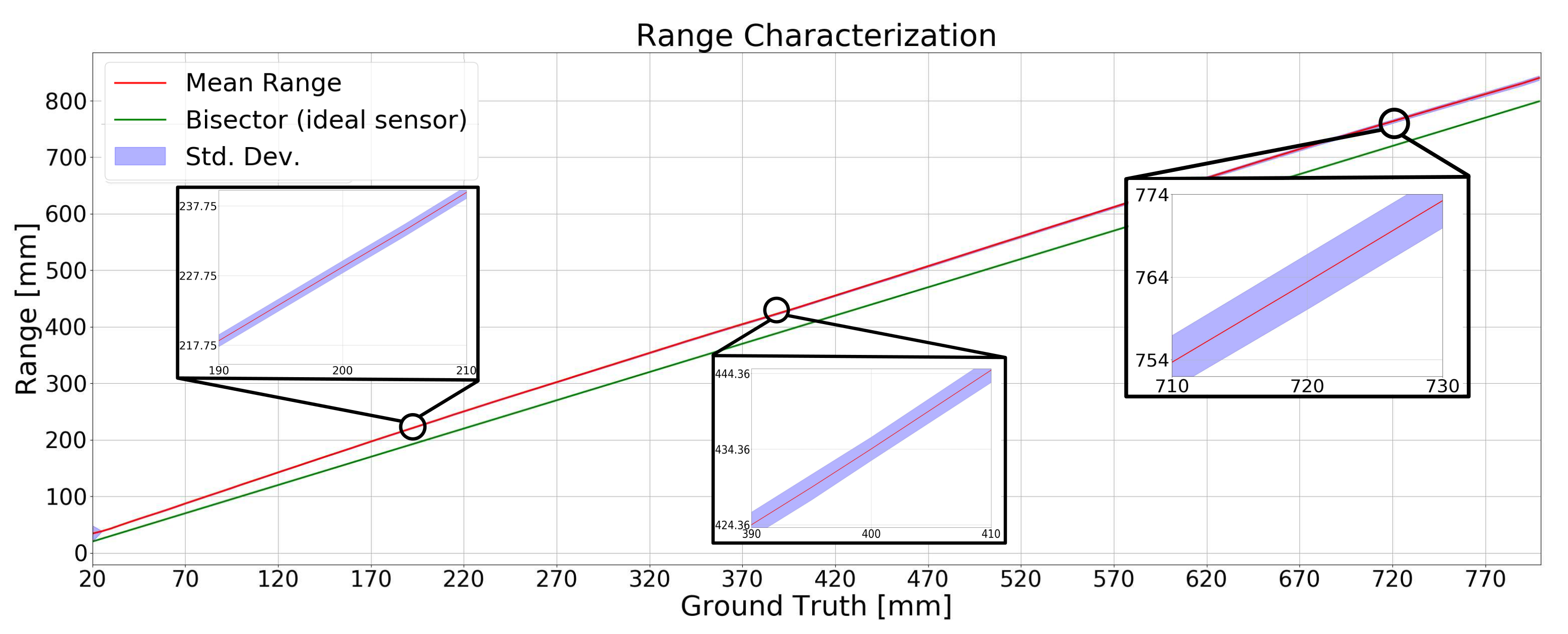
本文提出了一种利用微型VL53L5CX飞行时间(ToF)传感器(微型激光雷达)获取的粗糙点云,在机器人工作空间中定位目标物体的方法,适用于机械臂操作和检测等任务。首先,我们进行了一系列实验,校准传感器读数与目标物体的相对距离和方向之间的依赖关系。然后,我们提出了一个概率传感器模型,并通过粒子滤波(PF)在物体姿态估计任务中验证了该模型。结果表明,与两种基线方法(一种假设测量没有不确定性,另一种使用传感器数据手册提供的置信度)相比,所提出的传感器模型提高了目标物体定位的性能。
🔬 方法详解
问题定义:论文旨在解决机械臂在工作空间中精确定位目标物体的问题。现有方法通常忽略微型激光雷达传感器的特性,或者直接使用传感器数据手册提供的置信度,导致定位精度不高,无法满足复杂操作的需求。现有方法无法有效建模传感器测量的不确定性,限制了定位算法的性能。
核心思路:论文的核心思路是建立一个概率传感器模型,该模型能够准确描述传感器读数与目标物体相对距离和方向之间的关系。通过校准传感器读数,并考虑测量的不确定性,可以提高目标物体定位的精度和鲁棒性。这种方法能够更好地利用微型激光雷达提供的信息,从而实现更精确的定位。
技术框架:整体流程包括以下几个阶段:1) 传感器校准实验:通过实验获取传感器读数与目标物体相对距离和方向之间的关系数据。2) 概率传感器模型构建:基于实验数据,建立概率传感器模型,描述传感器读数的不确定性。3) 目标物体姿态估计:使用粒子滤波(PF)算法,结合概率传感器模型,估计目标物体的姿态。
关键创新:论文的关键创新在于提出了一个概率传感器模型,该模型能够准确描述微型激光雷达传感器读数与目标物体相对距离和方向之间的关系。与现有方法相比,该模型能够更好地处理传感器测量的不确定性,从而提高目标物体定位的精度。该模型考虑了传感器特性,避免了直接使用数据手册置信度带来的误差。
关键设计:论文的关键设计包括:1) 详细的传感器校准实验,用于获取传感器读数与目标物体相对距离和方向之间的关系数据。2) 基于实验数据的概率传感器模型构建,该模型能够准确描述传感器读数的不确定性。3) 使用粒子滤波(PF)算法进行目标物体姿态估计,该算法能够有效地处理传感器测量的不确定性,并提供鲁棒的姿态估计结果。具体参数设置未知。
🖼️ 关键图片

📊 实验亮点
实验结果表明,所提出的概率传感器模型在目标物体定位任务中,相较于两种基线方法(一种假设测量没有不确定性,另一种使用传感器数据手册提供的置信度),性能得到了显著提升。具体提升幅度未知,但结果表明该模型能够更准确地估计目标物体的姿态。
🎯 应用场景
该研究成果可应用于多种机器人应用场景,例如:机械臂操作、自动化检测、三维重建等。通过提高机械臂对周围环境的感知能力,可以实现更精确、更高效的自动化操作。此外,该技术还可以应用于无人机、移动机器人等领域,提高其自主导航和环境感知能力。未来,该技术有望在工业自动化、智能制造等领域发挥重要作用。
📄 摘要(原文)
For several tasks, ranging from manipulation to inspection, it is beneficial for robots to localize a target object in their surroundings. In this paper, we propose an approach that utilizes coarse point clouds obtained from miniaturized VL53L5CX Time-of-Flight (ToF) sensors (tiny LiDARs) to localize a target object in the robot's workspace. We first conduct an experimental campaign to calibrate the dependency of sensor readings on relative range and orientation to targets. We then propose a probabilistic sensor model, which we validate in an object pose estimation task using a Particle Filter (PF). The results show that the proposed sensor model improves the performance of the localization of the target object with respect to two baselines: one that assumes measurements are free from uncertainty and one in which the confidence is provided by the sensor datasheet.