Learning-Based Passive Fault-Tolerant Control of a Quadrotor with Rotor Failure
作者: Jiehao Chen, Kaidong Zhao, Zihan Liu, YanJie Li, Yunjiang Lou
分类: cs.RO, eess.SY
发布日期: 2025-03-04
💡 一句话要点
提出一种基于学习的四旋翼被动容错控制方法,解决单旋翼故障问题
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 四旋翼 容错控制 被动容错 强化学习 故障诊断 无人机 旋翼故障
📋 核心要点
- 现有方法将旋翼故障视为扰动,依赖单一控制器,难以兼顾多种故障场景下的适应性和控制性能。
- 论文提出选择器-控制器网络结构,将故障检测和控制器集成到统一策略网络中,提升对多种故障的适应性。
- 通过强化学习、行为克隆和监督学习混合框架训练策略网络,实验验证了故障响应速度和位置跟踪性能的显著提升。
📝 摘要(中文)
本文提出了一种基于学习的被动容错控制(PFTC)方法,用于处理四旋翼任意单旋翼故障,包括从无故障到完全旋翼失效的各种情况,无需任何旋翼故障信息或控制器切换。与现有将旋翼故障视为扰动并依赖单个控制器处理多种故障场景的方法不同,我们的方法引入了一种新颖的选择器-控制器网络结构。该架构集成了故障检测模块和控制器到一个统一的策略网络中,有效地结合了PFTC对多种故障场景的适应性和主动容错控制(AFTC)的卓越控制性能。为了优化性能,策略网络使用混合框架进行训练,该框架协同了强化学习(RL)、行为克隆(BC)和带有故障信息的监督学习。大量的仿真和真实实验验证了所提出的方法,表明与最先进的PFTC和AFTC方法相比,在故障响应速度和位置跟踪性能方面有显著提高。
🔬 方法详解
问题定义:论文旨在解决四旋翼飞行器在发生单旋翼故障时,如何在无需故障信息或控制器切换的情况下,实现稳定可靠的飞行控制。现有被动容错控制方法通常将旋翼故障视为外部扰动,采用单一控制器进行处理,难以在各种故障情况下都保持良好的控制性能。主动容错控制方法虽然性能较好,但需要准确的故障检测和控制器切换,增加了系统复杂性。
核心思路:论文的核心思路是设计一个能够自适应不同程度旋翼故障的统一策略网络。该网络通过学习,能够根据当前的飞行状态和潜在的故障情况,自动选择合适的控制策略,从而实现被动容错控制。这种方法避免了显式的故障检测和控制器切换,简化了系统设计,提高了鲁棒性。
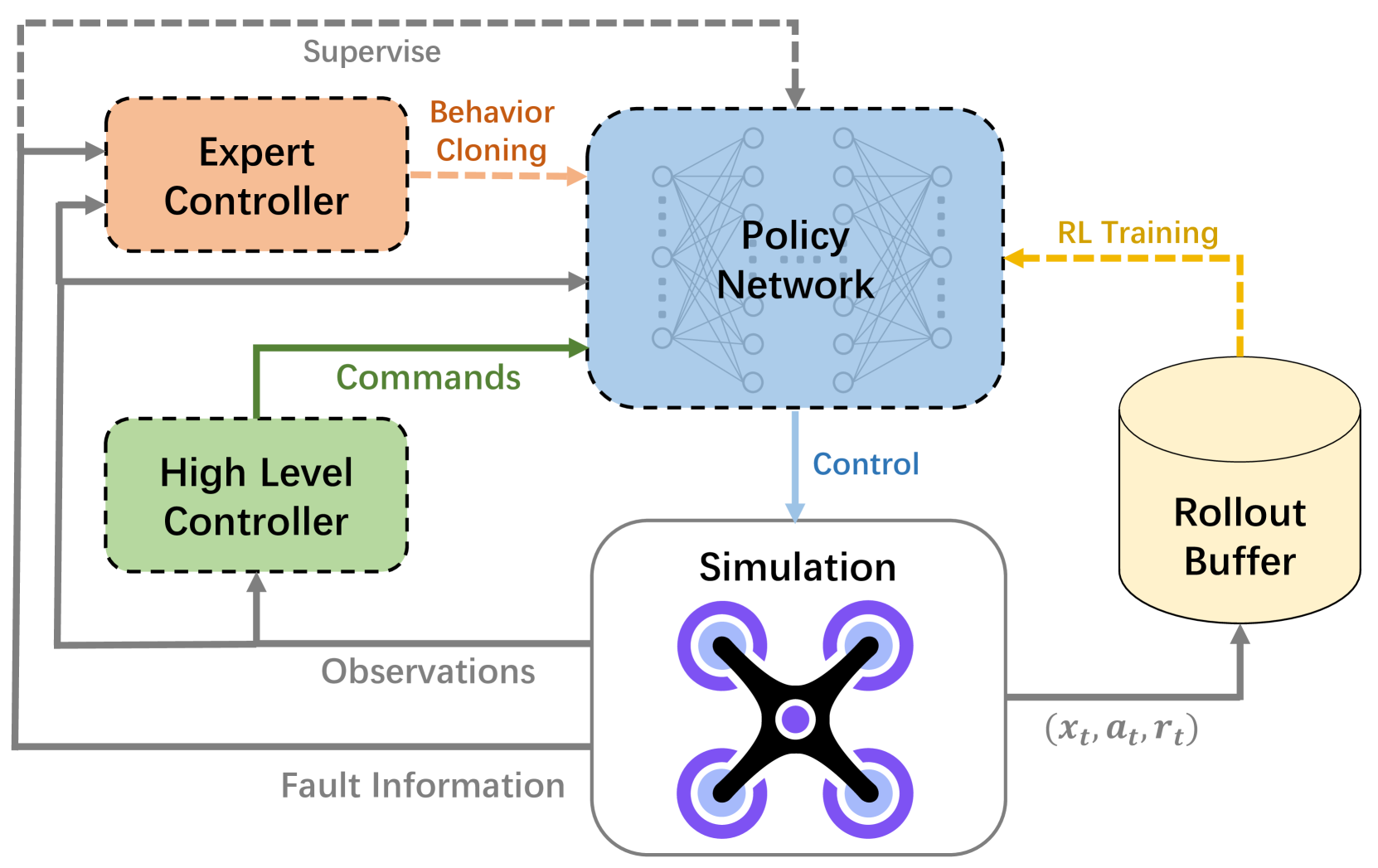
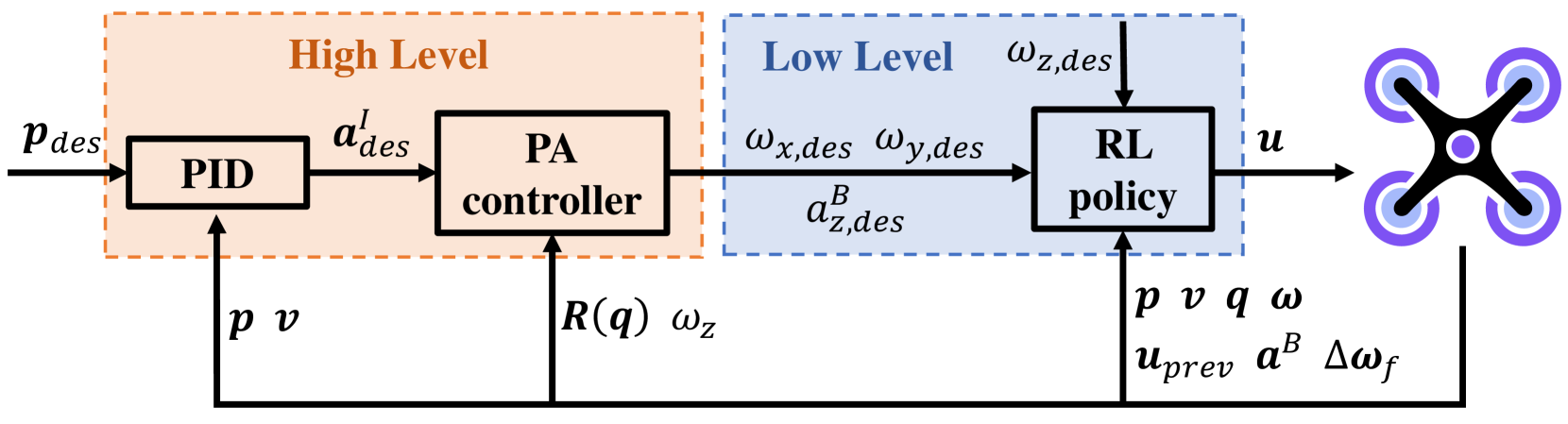
技术框架:整体架构是一个选择器-控制器网络。该网络包含两个主要模块:选择器模块和控制器模块。选择器模块负责根据当前的飞行状态选择合适的控制策略,控制器模块则根据选择的控制策略生成控制指令。整个网络通过端到端的方式进行训练,无需人工设计复杂的控制逻辑。训练过程采用混合框架,结合了强化学习、行为克隆和监督学习。
关键创新:最重要的技术创新点在于将故障检测和控制器集成到一个统一的策略网络中。与传统方法相比,该方法无需显式的故障检测模块,而是通过学习的方式,让网络自动识别故障并做出相应的控制决策。这种方法简化了系统设计,提高了鲁棒性,并能够更好地适应各种未知的故障情况。
关键设计:选择器-控制器网络的具体结构未知,但可以推测选择器模块可能采用某种分类或回归模型,根据飞行状态输出一个代表控制策略的索引。控制器模块则可能包含多个不同的控制器,每个控制器对应一种特定的控制策略。损失函数的设计至关重要,需要综合考虑飞行器的稳定性和控制精度,以及对不同故障情况的适应性。强化学习、行为克隆和监督学习的权重比例也需要仔细调整,以获得最佳的训练效果。
🖼️ 关键图片
📊 实验亮点
论文通过仿真和真实实验验证了所提出方法的有效性。实验结果表明,与最先进的被动容错控制和主动容错控制方法相比,该方法在故障响应速度和位置跟踪性能方面有显著提高。具体数据未知,但摘要强调了“显著提高”,表明性能提升较为明显。该方法无需故障信息或控制器切换,简化了系统设计,提高了鲁棒性。
🎯 应用场景
该研究成果可应用于无人机物流、巡检、搜救等领域。在这些应用场景中,无人机经常需要在复杂环境中飞行,面临各种潜在的故障风险。该方法能够提高无人机在发生旋翼故障时的可靠性和安全性,降低事故发生的概率,具有重要的实际应用价值和广阔的市场前景。未来,该方法还可以扩展到其他类型的无人机和机器人系统。
📄 摘要(原文)
This paper proposes a learning-based passive fault-tolerant control (PFTC) method for quadrotor capable of handling arbitrary single-rotor failures, including conditions ranging from fault-free to complete rotor failure, without requiring any rotor fault information or controller switching. Unlike existing methods that treat rotor faults as disturbances and rely on a single controller for multiple fault scenarios, our approach introduces a novel Selector-Controller network structure. This architecture integrates fault detection module and the controller into a unified policy network, effectively combining the adaptability to multiple fault scenarios of PFTC with the superior control performance of active fault-tolerant control (AFTC). To optimize performance, the policy network is trained using a hybrid framework that synergizes reinforcement learning (RL), behavior cloning (BC), and supervised learning with fault information. Extensive simulations and real-world experiments validate the proposed method, demonstrating significant improvements in fault response speed and position tracking performance compared to state-of-the-art PFTC and AFTC approaches.