SEB-Naver: A SE(2)-based Local Navigation Framework for Car-like Robots on Uneven Terrain
作者: Xiaoying Li, Long Xu, Xiaolin Huang, Donglai Xue, Zhihao Zhang, Zhichao Han, Chao Xu, Yanjun Cao, Fei Gao
分类: cs.RO
发布日期: 2025-03-04 (更新: 2025-03-05)
备注: 8 pages, 8 figures
🔗 代码/项目: GITHUB
💡 一句话要点
SEB-Naver:面向崎岖地形类车机器人,基于SE(2)的局部导航框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 类车机器人 崎岖地形导航 SE(2)网格 可通行性评估 轨迹规划 GPU并行计算 地形建模
📋 核心要点
- 类车机器人在崎岖地形导航面临可通行性评估和地形相关的运动学建模难题,现有方法难以兼顾效率与精度。
- SEB-Naver框架利用GPU加速SE(2)网格的可通行性评估,并结合地形相关的运动学模型进行优化轨迹规划。
- 实验结果表明,SEB-Naver能够实时进行地形评估和轨迹优化,并在仿真和真实环境中验证了其有效性。
📝 摘要(中文)
本文提出SEB-Naver,一种新颖的基于SE(2)的局部导航框架,旨在克服类车机器人在崎岖地形上自主导航的挑战,尤其是在可通行性评估和用于运动规划的与地形相关的运动学建模方面。首先,我们提出了一种高效的SE(2)网格可通行性评估方法,利用GPU并行计算来实现局部地图的实时更新和维护。其次,受到微分平坦性的启发,我们提出了一种基于优化的轨迹规划方法,该方法集成了与地形相关的运动学模型,显著提高了规划效率和轨迹质量。最后,我们将这些组件统一到SEB-Naver中,实现了实时的地形评估和轨迹优化。大量的仿真和真实世界的实验证明了我们方法的有效性和效率。代码已开源。
🔬 方法详解
问题定义:类车机器人在崎岖地形上的自主导航面临两大挑战:一是如何高效准确地评估地形的可通行性,二是如何在运动规划中考虑地形对车辆运动学的影响。传统方法通常难以在计算效率和精度之间取得平衡,导致导航性能下降。
核心思路:SEB-Naver的核心思路是将地形信息融入到运动规划过程中,通过高效的可通行性评估和基于优化的轨迹规划,实现类车机器人在崎岖地形上的安全高效导航。该方法利用GPU并行计算加速地形评估,并采用微分平坦性原理优化轨迹,从而提高规划效率和轨迹质量。
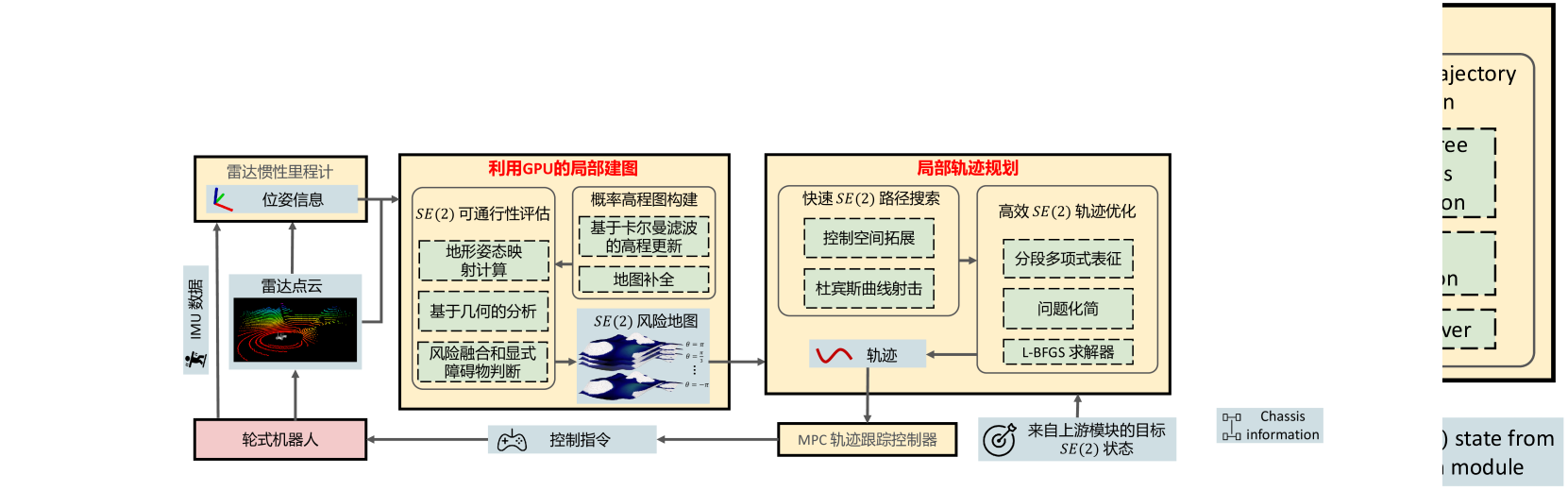
技术框架:SEB-Naver框架主要包含以下几个模块:1) 基于GPU的SE(2)网格可通行性评估模块,用于实时更新和维护局部地图;2) 基于地形相关的运动学模型的轨迹规划模块,利用优化方法生成高质量的轨迹;3) 统一的导航框架,将上述模块集成在一起,实现实时的地形评估和轨迹优化。整体流程为:传感器数据输入 -> 可通行性评估 -> 轨迹规划 -> 运动控制。
关键创新:该论文的关键创新在于:1) 提出了一种高效的基于GPU的SE(2)网格可通行性评估方法,能够实时更新局部地图;2) 将地形相关的运动学模型集成到轨迹规划中,提高了规划的精度和效率;3) 将上述模块统一到一个完整的导航框架中,实现了类车机器人在崎岖地形上的自主导航。与现有方法相比,SEB-Naver能够更好地处理崎岖地形带来的挑战。
关键设计:在可通行性评估方面,论文设计了针对SE(2)网格的并行计算方法,充分利用GPU的计算能力。在轨迹规划方面,论文采用了基于优化的方法,并根据地形信息调整运动学模型参数。具体参数设置和损失函数细节在论文中进行了详细描述(具体细节未知)。
🖼️ 关键图片


📊 实验亮点
论文通过大量的仿真和真实世界的实验验证了SEB-Naver框架的有效性和效率。实验结果表明,该框架能够实时进行地形评估和轨迹优化,显著提高了类车机器人在崎岖地形上的导航性能。具体的性能数据和对比基线在论文中进行了详细描述(具体数据未知)。
🎯 应用场景
SEB-Naver框架可应用于各种需要在崎岖地形上进行自主导航的类车机器人,例如:农业机器人、矿业机器人、建筑机器人和野外勘探机器人。该研究成果有助于提高这些机器人的工作效率和安全性,并拓展其应用范围。未来,该框架可以进一步扩展到更复杂的地形和任务中。
📄 摘要(原文)
Autonomous navigation of car-like robots on uneven terrain poses unique challenges compared to flat terrain, particularly in traversability assessment and terrain-associated kinematic modelling for motion planning. This paper introduces SEB-Naver, a novel SE(2)-based local navigation framework designed to overcome these challenges. First, we propose an efficient traversability assessment method for SE(2) grids, leveraging GPU parallel computing to enable real-time updates and maintenance of local maps. Second, inspired by differential flatness, we present an optimization-based trajectory planning method that integrates terrain-associated kinematic models, significantly improving both planning efficiency and trajectory quality. Finally, we unify these components into SEB-Naver, achieving real-time terrain assessment and trajectory optimization. Extensive simulations and real-world experiments demonstrate the effectiveness and efficiency of our approach. The code is at https://github.com/ZJU-FAST-Lab/seb_naver.