NavG: Risk-Aware Navigation in Crowded Environments Based on Reinforcement Learning with Guidance Points
作者: Qianyi Zhang, Wentao Luo, Boyi Liu, Ziyang Zhang, Yaoyuan Wang, Jingtai Liu
分类: cs.RO
发布日期: 2025-03-03
💡 一句话要点
NavG:基于强化学习与引导点的拥挤环境风险感知导航
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 强化学习 机器人导航 拥挤环境 引导点 运动规划
📋 核心要点
- 现有导航方法易受感知误差影响,尤其在拥挤环境中人体检测和跟踪方面表现不佳。
- 提出基于强化学习的导航框架,引入引导点作为方向提示,提升导航的鲁棒性和安全性。
- 仿真和真实实验表明,该方法在成功率、行驶时间和避障能力方面均有显著提升。
📝 摘要(中文)
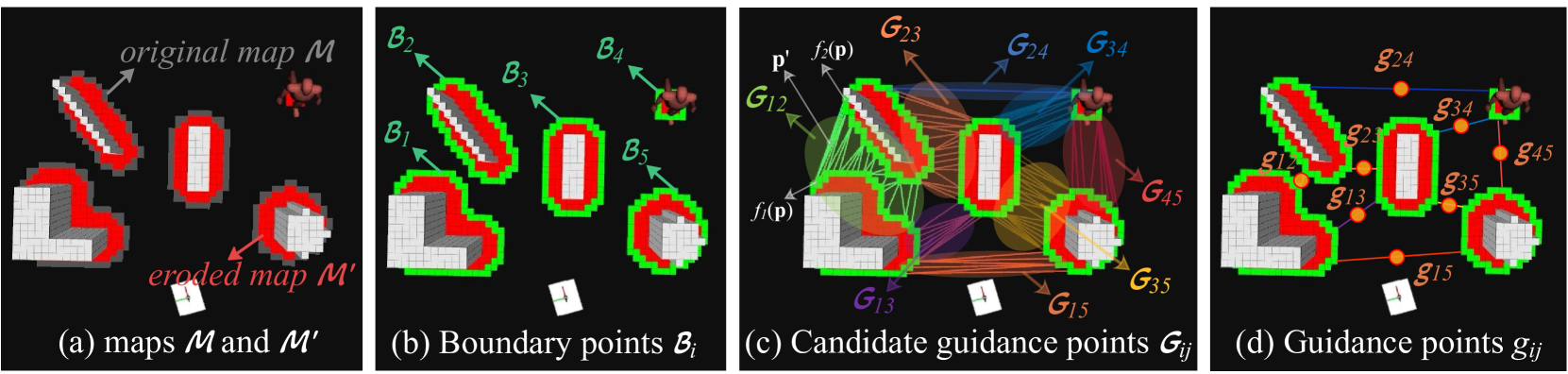
导航系统中的运动规划极易受到上游感知误差的影响,尤其是在人体检测和跟踪方面。为了缓解这个问题,本文引入了引导点的概念——一种基于强化学习框架内的新型方向提示。开发了一种结构化的引导点识别方法,包括障碍物边界提取、潜在引导点检测和冗余消除。为了将引导点集成到导航流程中,提出了一种感知到规划的映射策略,将引导点与其他感知输入统一起来,使强化学习智能体能够有效地利用原始激光数据、人体检测和跟踪以及引导点之间的互补关系。定性和定量的仿真结果表明,该方法实现了最高的成功率和接近最优的行驶时间,大大提高了安全性和效率。此外,在动态走廊和大厅中的真实实验验证了机器人自信地绕过障碍物并稳健地避开行人的能力。
🔬 方法详解
问题定义:现有的导航系统在拥挤环境中,由于感知模块(如人体检测和跟踪)的误差,导致运动规划的可靠性和安全性降低。尤其是在动态环境中,感知误差会迅速累积,使得机器人难以做出准确的导航决策。因此,如何在存在感知不确定性的情况下,实现安全高效的导航是本文要解决的核心问题。
核心思路:本文的核心思路是引入“引导点”的概念,作为一种方向性的提示信息,辅助强化学习智能体进行导航决策。引导点可以看作是局部环境中的关键位置,能够引导机器人朝着安全且高效的方向移动。通过将引导点与原始感知数据(如激光雷达数据)以及人体检测和跟踪结果相结合,可以提高机器人对环境的理解能力,从而提升导航的鲁棒性。
技术框架:整体框架包含三个主要阶段:1) 引导点提取:从环境地图中提取潜在的引导点,并进行筛选和优化。2) 感知到规划的映射:将原始感知数据、人体检测和跟踪结果以及引导点信息融合,形成强化学习智能体的输入状态。3) 强化学习导航:使用强化学习算法训练智能体,使其能够根据当前状态选择合适的动作,实现安全高效的导航。
关键创新:本文的关键创新在于引导点的引入和结构化的引导点识别方法。不同于传统的基于全局地图的路径规划方法,本文提出的引导点方法更加关注局部环境的特征,能够更好地适应动态变化的环境。此外,本文还提出了一种感知到规划的映射策略,能够有效地融合不同类型的感知信息,提高强化学习智能体的决策能力。
关键设计:引导点提取阶段,首先提取障碍物边界,然后检测潜在的引导点,最后通过冗余消除来优化引导点集合。在感知到规划的映射阶段,将激光雷达数据、人体检测和跟踪结果以及引导点信息进行编码,作为强化学习智能体的输入。强化学习算法采用Actor-Critic结构,Actor网络负责选择动作,Critic网络负责评估状态价值。损失函数包括导航成功率、行驶时间和碰撞惩罚等。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法在仿真和真实环境中均取得了显著的性能提升。在仿真环境中,该方法实现了最高的导航成功率和接近最优的行驶时间。与传统的基于强化学习的导航方法相比,该方法在成功率方面提升了约10%-20%。在真实环境中,机器人能够自信地绕过障碍物并稳健地避开行人,验证了该方法的有效性和鲁棒性。
🎯 应用场景
该研究成果可应用于各种需要在拥挤环境中进行自主导航的机器人,例如服务机器人、物流机器人、巡检机器人等。通过提高机器人在复杂环境中的导航能力,可以提升其工作效率和安全性,降低人工干预的需求。未来,该技术有望应用于自动驾驶、智能家居等领域,实现更加智能化的生活。
📄 摘要(原文)
Motion planning in navigation systems is highly susceptible to upstream perceptual errors, particularly in human detection and tracking. To mitigate this issue, the concept of guidance points--a novel directional cue within a reinforcement learning-based framework--is introduced. A structured method for identifying guidance points is developed, consisting of obstacle boundary extraction, potential guidance point detection, and redundancy elimination. To integrate guidance points into the navigation pipeline, a perception-to-planning mapping strategy is proposed, unifying guidance points with other perceptual inputs and enabling the RL agent to effectively leverage the complementary relationships among raw laser data, human detection and tracking, and guidance points. Qualitative and quantitative simulations demonstrate that the proposed approach achieves the highest success rate and near-optimal travel times, greatly improving both safety and efficiency. Furthermore, real-world experiments in dynamic corridors and lobbies validate the robot's ability to confidently navigate around obstacles and robustly avoid pedestrians.