TacCap: A Wearable FBG-Based Tactile Sensor for Seamless Human-to-Robot Skill Transfer
作者: Chengyi Xing, Hao Li, Yi-Lin Wei, Tian-Ao Ren, Tianyu Tu, Yuhao Lin, Elizabeth Schumann, Wei-Shi Zheng, Mark R. Cutkosky
分类: cs.RO
发布日期: 2025-03-03
备注: 7 pages, 8 figures
💡 一句话要点
TacCap:一种用于无缝人-机器人技能迁移的可穿戴FBG触觉传感器
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱七:动作重定向 (Motion Retargeting)
关键词: 触觉传感 可穿戴设备 光纤布拉格光栅 人机技能迁移 机器人灵巧操作
📋 核心要点
- 现有大规模人类示教数据集缺乏触觉反馈,这阻碍了机器人从人类学习灵巧操作技能。
- TacCap是一种基于FBG的可穿戴触觉传感器,旨在捕获高质量的触觉数据,用于人-机器人技能迁移。
- 实验验证了TacCap的灵敏度、重复性和一致性,并证明其在抓取稳定性预测任务中的有效性。
📝 摘要(中文)
触觉感知对于灵巧操作至关重要,但大规模的人类演示数据集缺乏触觉反馈,限制了其在机器人技能迁移中的有效性。为了解决这个问题,我们介绍了一种基于光纤布拉格光栅(FBG)的可穿戴触觉传感器TacCap,旨在实现无缝的人-机器人技能迁移。TacCap重量轻、耐用且不受电磁干扰,非常适合真实世界的数据收集。我们详细介绍了其设计和制造,评估了其灵敏度、重复性和传感器间一致性,并通过抓取稳定性预测和消融研究评估了其有效性。我们的结果表明,TacCap能够实现可迁移的触觉数据收集,从而弥合了人类演示和机器人执行之间的差距。为了支持进一步的研究和开发,我们开源了我们的硬件设计和软件。
🔬 方法详解
问题定义:论文旨在解决机器人技能学习中,缺乏高质量触觉数据的问题。现有的人类示教数据集通常只包含视觉和运动数据,而忽略了触觉信息,这使得机器人难以学习需要精细触觉反馈的操作技能。现有触觉传感器在可穿戴性、耐用性和抗电磁干扰方面存在不足,难以应用于真实场景的数据采集。
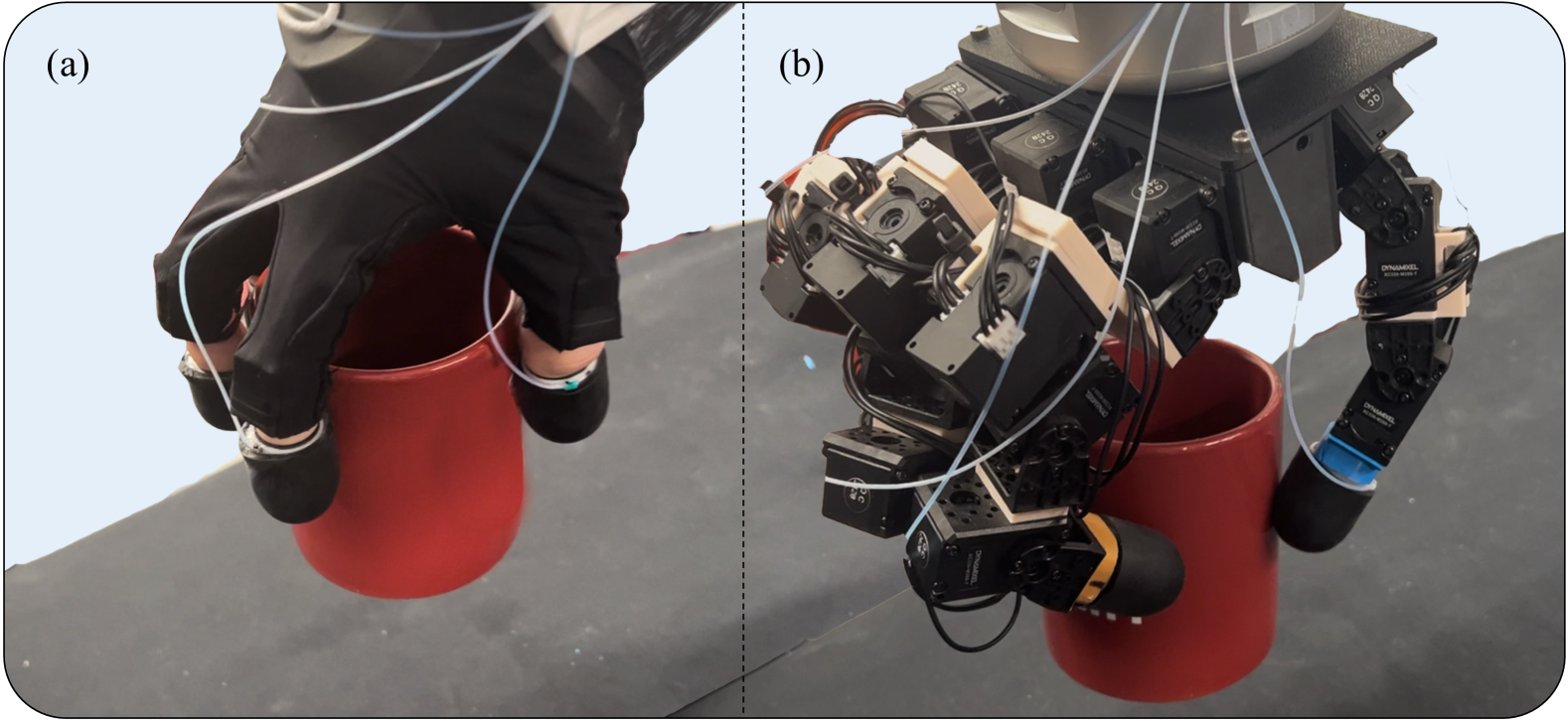
核心思路:论文的核心思路是设计一种基于光纤布拉格光栅(FBG)的可穿戴触觉传感器TacCap,用于捕获高质量的触觉数据。FBG传感器具有体积小、重量轻、灵敏度高、抗电磁干扰等优点,非常适合可穿戴应用。通过将TacCap集成到手套中,可以方便地采集人类在执行操作任务时的触觉数据,并将其用于训练机器人。
技术框架:TacCap系统的整体框架包括:1) FBG触觉传感器阵列:用于感知手指与物体之间的接触力;2) 数据采集系统:用于读取FBG传感器的输出信号;3) 数据处理模块:用于对原始数据进行滤波、校准和特征提取;4) 可视化界面:用于显示触觉数据和抓取状态。整个流程是从人类佩戴TacCap手套进行操作,采集触觉数据,然后将数据用于训练机器人模型。
关键创新:TacCap的关键创新在于其可穿戴性和基于FBG的触觉感知。与传统的触觉传感器相比,TacCap更加轻便、耐用,并且不受电磁干扰,更适合在真实环境中进行数据采集。此外,TacCap的设计允许灵活地调整传感器阵列的布局,以适应不同的操作任务。
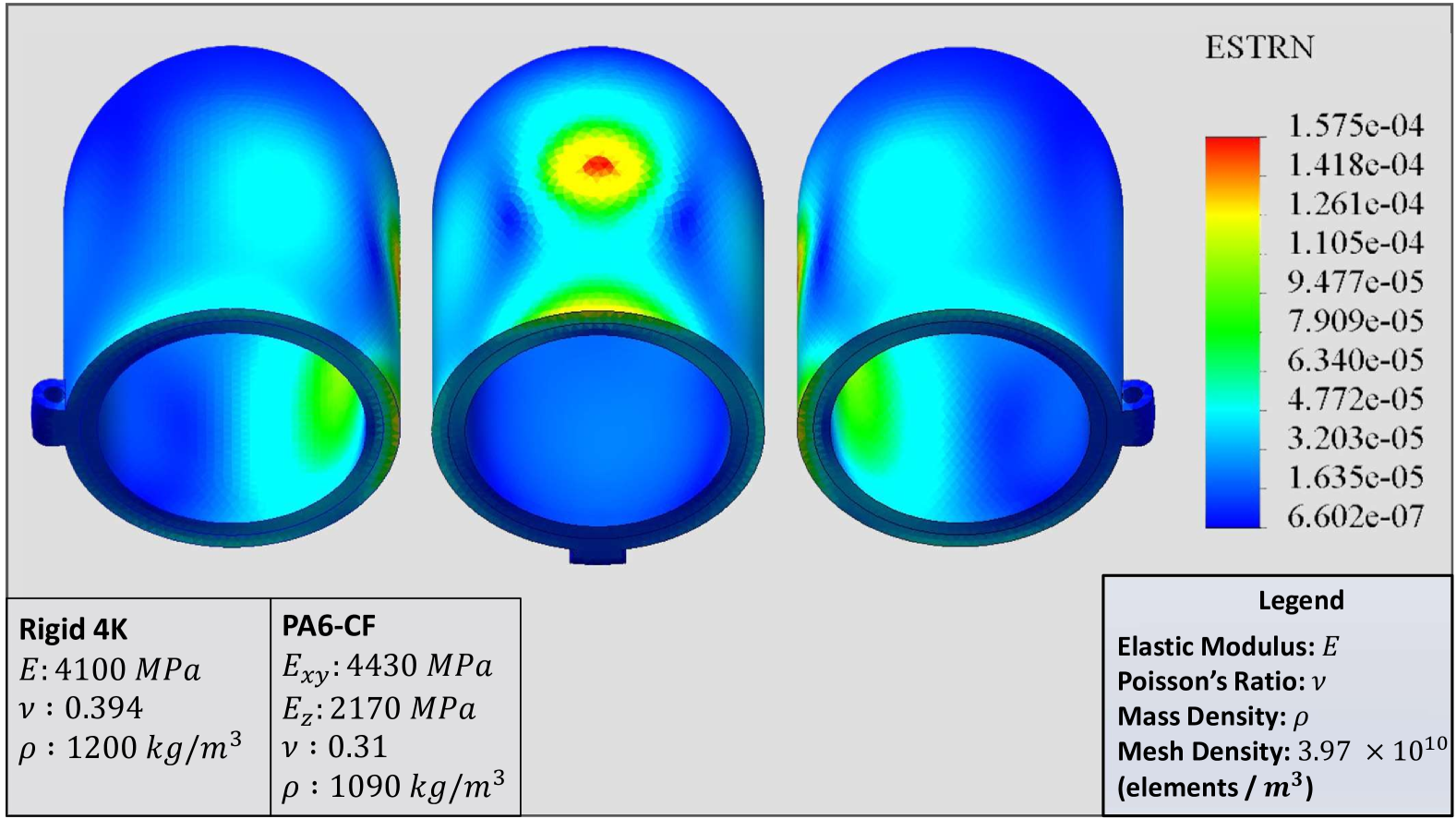
关键设计:TacCap的关键设计包括:1) 传感器布局:根据手指的运动范围和接触区域,优化了传感器在手套上的布局;2) FBG传感器的选择:选择了具有高灵敏度和低串扰的FBG传感器;3) 数据处理算法:开发了一种基于卡尔曼滤波的校准算法,用于消除传感器漂移和噪声;4) 抓取稳定性预测模型:使用采集到的触觉数据训练了一个深度学习模型,用于预测抓取的稳定性。
🖼️ 关键图片

📊 实验亮点
实验结果表明,TacCap具有良好的灵敏度、重复性和传感器间一致性。在抓取稳定性预测任务中,使用TacCap采集的触觉数据训练的模型,其预测准确率显著高于仅使用视觉数据的模型。消融研究表明,触觉信息对于提高抓取稳定性预测的准确率至关重要。具体来说,TacCap能够以较高的精度区分不同的抓取状态,并预测抓取是否会失败。
🎯 应用场景
TacCap的应用场景广泛,包括机器人灵巧操作、远程操作、医疗康复和人机交互等领域。通过TacCap采集的触觉数据可以用于训练机器人执行各种操作任务,例如抓取、装配和操作工具。在远程操作中,TacCap可以为操作员提供触觉反馈,提高操作的精度和效率。在医疗康复领域,TacCap可以用于评估患者的手部功能,并辅助康复训练。此外,TacCap还可以用于开发更自然和直观的人机交互界面。
📄 摘要(原文)
Tactile sensing is essential for dexterous manipulation, yet large-scale human demonstration datasets lack tactile feedback, limiting their effectiveness in skill transfer to robots. To address this, we introduce TacCap, a wearable Fiber Bragg Grating (FBG)-based tactile sensor designed for seamless human-to-robot transfer. TacCap is lightweight, durable, and immune to electromagnetic interference, making it ideal for real-world data collection. We detail its design and fabrication, evaluate its sensitivity, repeatability, and cross-sensor consistency, and assess its effectiveness through grasp stability prediction and ablation studies. Our results demonstrate that TacCap enables transferable tactile data collection, bridging the gap between human demonstrations and robotic execution. To support further research and development, we open-source our hardware design and software.