FLAME: A Federated Learning Benchmark for Robotic Manipulation
作者: Santiago Bou Betran, Alberta Longhini, Miguel Vasco, Yuchong Zhang, Danica Kragic
分类: cs.RO
发布日期: 2025-03-03 (更新: 2025-09-22)
备注: Under Review
💡 一句话要点
提出FLAME:一个用于机器人操作的联邦学习基准测试平台
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 联邦学习 机器人操作 基准测试 分布式学习 隐私保护
📋 核心要点
- 集中式机器人操作策略训练存在可扩展性、适应性和数据隐私问题,阻碍了领域发展。
- FLAME基准提供大规模操作数据集和联邦学习框架,促进分布式、隐私保护的策略学习。
- 实验验证了标准联邦学习算法在机器人操作中的潜力,并指出了未来研究方向。
📝 摘要(中文)
机器人操作领域的最新进展得益于在各种环境中收集的大规模数据集。传统上,在此类数据集上训练机器人操作策略是以集中式方式进行的,这引发了对可扩展性、适应性和数据隐私的担忧。虽然联邦学习能够实现去中心化、保护隐私的训练,但其在机器人操作中的应用仍未得到充分探索。我们推出了FLAME(跨操作环境的联邦学习),这是第一个专为机器人操作中的联邦学习设计的基准。FLAME包括:(i)一组大规模数据集,包含超过160,000个专家演示,涵盖多种操作任务,这些数据是在各种模拟环境中收集的;(ii)一个用于在联邦环境中进行机器人策略学习的训练和评估框架。我们在FLAME中评估了标准的联邦学习算法,展示了它们在分布式策略学习中的潜力,并强调了关键挑战。我们的基准为可扩展、自适应和具有隐私意识的机器人学习奠定了基础。
🔬 方法详解
问题定义:论文旨在解决机器人操作策略训练中,集中式训练带来的数据隐私、可扩展性和适应性问题。现有方法需要将所有数据集中到一个地方进行训练,这不仅侵犯了数据隐私,也限制了模型在不同环境下的泛化能力,并且难以扩展到大规模数据集。
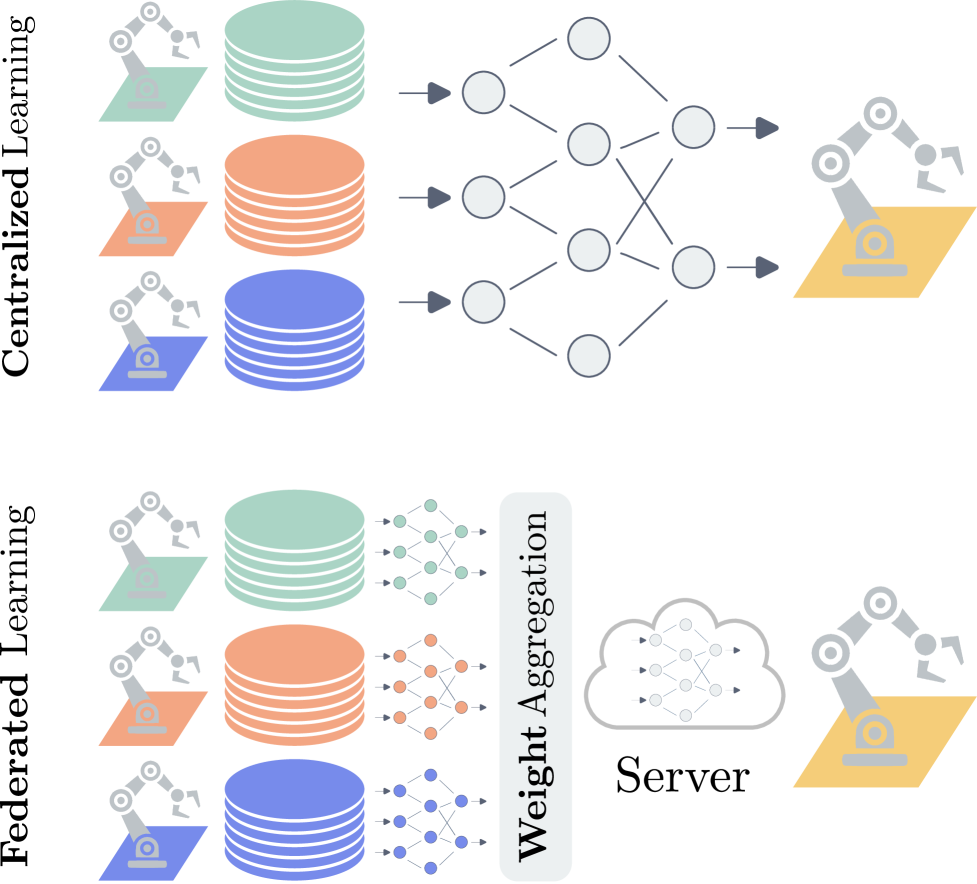
核心思路:论文的核心思路是利用联邦学习,在不共享原始数据的前提下,让多个客户端(模拟环境)协同训练一个全局模型。每个客户端在本地数据上训练模型,然后将模型更新上传到服务器进行聚合,最终得到一个在所有客户端数据上表现良好的全局模型。这样既保护了数据隐私,又提高了模型的可扩展性和适应性。
技术框架:FLAME基准测试平台包含以下主要组成部分:1) 大规模机器人操作数据集,涵盖多种任务和模拟环境;2) 联邦学习训练框架,支持标准的联邦学习算法,如FedAvg;3) 评估框架,用于评估联邦学习训练得到的策略在不同环境下的性能。整个流程包括:客户端本地训练、服务器模型聚合、全局模型评估。
关键创新:该论文的主要创新在于构建了一个专门针对机器人操作的联邦学习基准测试平台FLAME。此前,联邦学习在机器人操作领域的应用相对较少,缺乏统一的评估标准和数据集。FLAME的出现填补了这一空白,为研究人员提供了一个方便的平台来开发和评估新的联邦学习算法在机器人操作中的性能。
关键设计:FLAME基准测试平台使用了多种模拟环境,以增加数据的多样性。数据集包含超过16万个专家演示,涵盖多种操作任务。在联邦学习算法方面,论文评估了FedAvg等标准算法,并分析了其在机器人操作任务中的表现。具体的参数设置和网络结构等细节未在摘要中详细说明,属于未知信息。
🖼️ 关键图片


📊 实验亮点
论文通过在FLAME基准上评估标准联邦学习算法,展示了其在分布式策略学习中的潜力。实验结果表明,联邦学习可以在保护数据隐私的前提下,有效地训练机器人操作策略。虽然具体的性能数据和提升幅度未在摘要中给出,但该研究为联邦学习在机器人操作领域的应用奠定了基础,并指出了未来研究的关键挑战。
🎯 应用场景
FLAME基准测试平台可用于开发和评估各种联邦学习算法在机器人操作领域的性能。潜在应用包括:分布式机器人协作、隐私保护的机器人技能学习、以及在不同环境下自适应的机器人策略训练。该研究有助于推动机器人技术在工业、医疗等领域的应用,并促进机器人更加智能、安全地与人类协作。
📄 摘要(原文)
Recent progress in robotic manipulation has been fueled by large-scale datasets collected across diverse environments. Training robotic manipulation policies on these datasets is traditionally performed in a centralized manner, raising concerns regarding scalability, adaptability, and data privacy. While federated learning enables decentralized, privacy-preserving training, its application to robotic manipulation remains largely unexplored. We introduce FLAME (Federated Learning Across Manipulation Environments), the first benchmark designed for federated learning in robotic manipulation. FLAME consists of: (i) a set of large-scale datasets of over 160,000 expert demonstrations of multiple manipulation tasks, collected across a wide range of simulated environments; (ii) a training and evaluation framework for robotic policy learning in a federated setting. We evaluate standard federated learning algorithms in FLAME, showing their potential for distributed policy learning and highlighting key challenges. Our benchmark establishes a foundation for scalable, adaptive, and privacy-aware robotic learning.