SIMS: Surgeon-Intention-driven Motion Scaling for Efficient and Precise Teleoperation
作者: Jeonghyeon Yoon, Sanghyeok Park, Hyojae Park, Cholin Kim, Michael C. Yip, Minho Hwang
分类: cs.RO
发布日期: 2025-03-03 (更新: 2025-10-13)
💡 一句话要点
提出基于外科医生意图的运动缩放系统SIMS,提升遥操作手术的效率和精度。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 遥操作手术 运动缩放 意图识别 模糊C均值聚类 人机交互
📋 核心要点
- 传统遥操作手术固定运动缩放因子,难以兼顾精细操作和快速移动的需求。
- SIMS系统通过分析外科医生的运动意图,动态调整运动缩放因子,实现自适应控制。
- 实验表明,SIMS能显著减少碰撞,降低外科医生负荷,同时保持任务效率。
📝 摘要(中文)
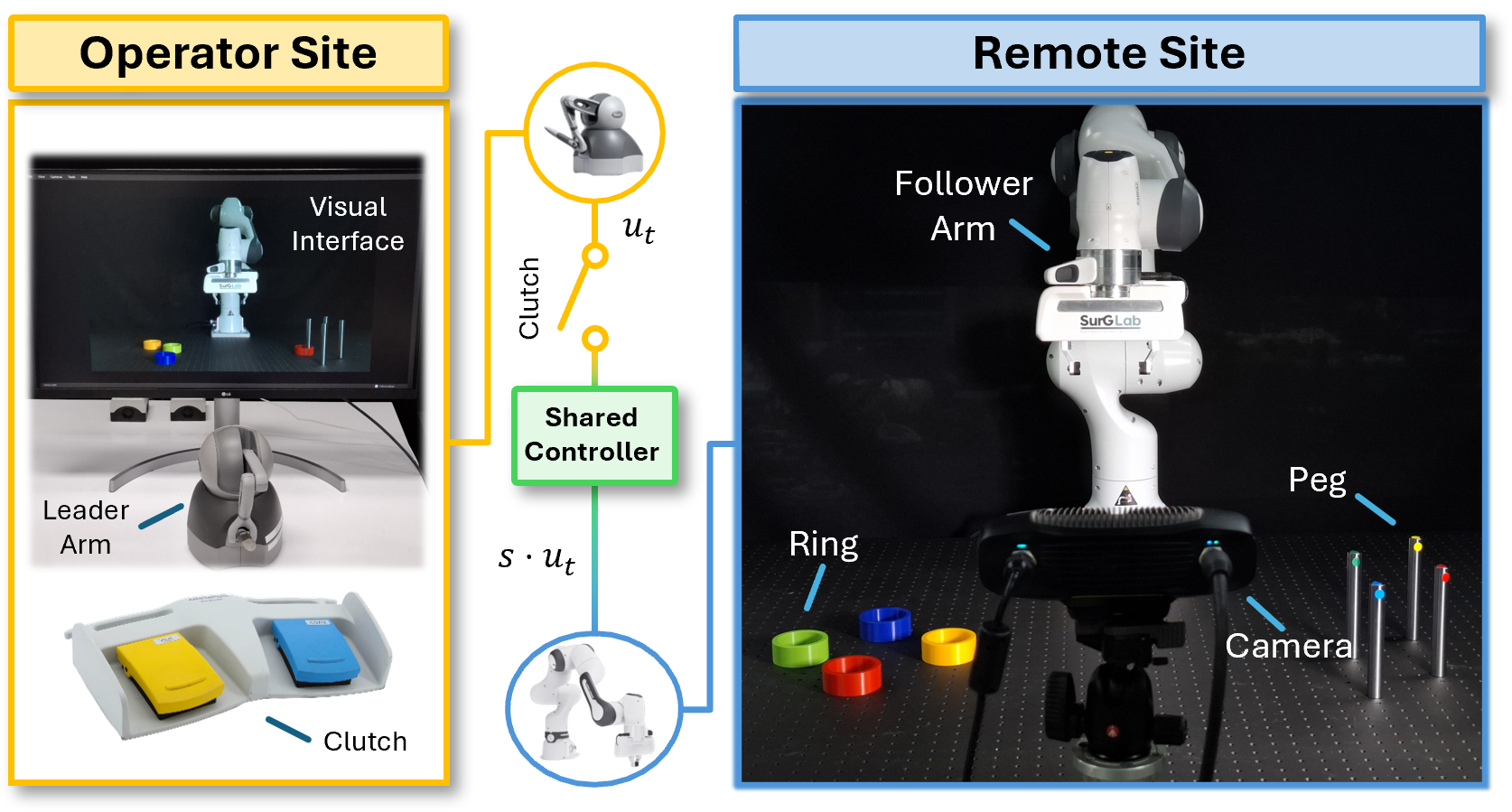
远程机器人手术通常依赖于固定的运动缩放因子(MSF)来映射外科医生的手部运动到机器人器械,但这在精度和效率之间引入了权衡:小的MSF能够实现精细的操作,但会减慢大幅运动的速度,而大的MSF会加速转移,但会牺牲精度。我们提出了一种基于外科医生意图的运动缩放(SIMS)系统,该系统仅基于运动学线索实时动态调整MSF。SIMS提取线性速度、工具运动对齐和双臂协调特征,通过模糊C均值聚类对运动意图进行分类,并独立地为双臂应用基于置信度的更新。在da Vinci Research Kit上进行的用户研究(n=10,三个手术训练任务)中,与固定MSF相比,SIMS显著减少了碰撞(平均减少83%),降低了精神和身体负荷,并保持了任务完成效率。这些发现表明,SIMS是一种实用且轻量级的方法,可用于更安全、更高效和用户自适应的远程手术控制。
🔬 方法详解
问题定义:远程机器人手术中,固定的运动缩放因子(MSF)无法同时满足高精度操作和快速移动的需求。小的MSF虽然能保证精度,但会降低操作效率,而大的MSF则会牺牲精度。现有方法缺乏根据外科医生操作意图动态调整MSF的能力,导致操作效率和安全性难以兼顾。
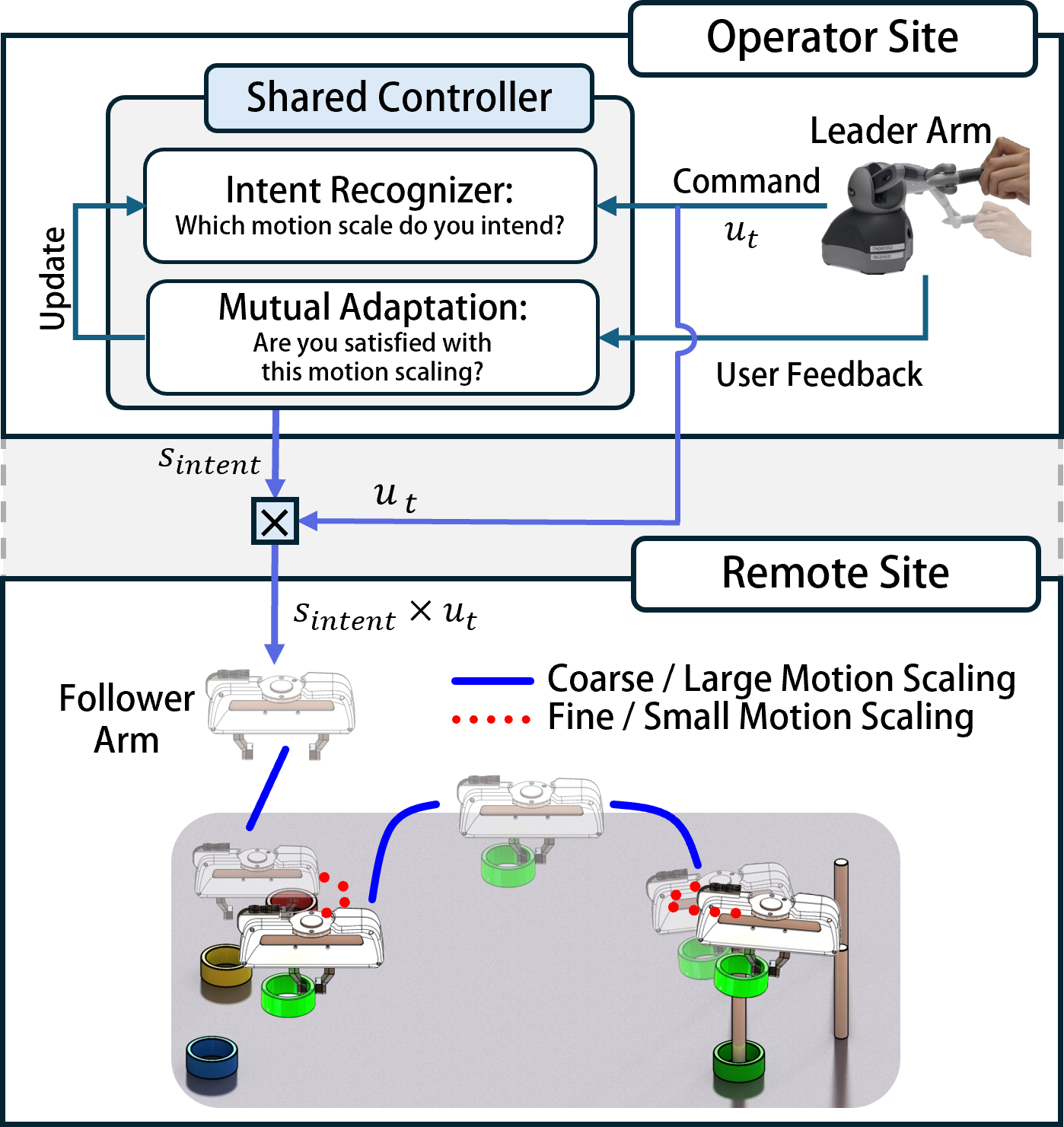
核心思路:SIMS的核心在于根据外科医生的运动意图动态调整MSF。通过分析外科医生的运动学特征,推断其当前的操作意图(例如,精细操作、快速移动等),然后根据不同的意图选择合适的MSF。这样可以在保证精度的前提下,提高操作效率,或者在需要快速移动时,牺牲少量精度来加速操作。
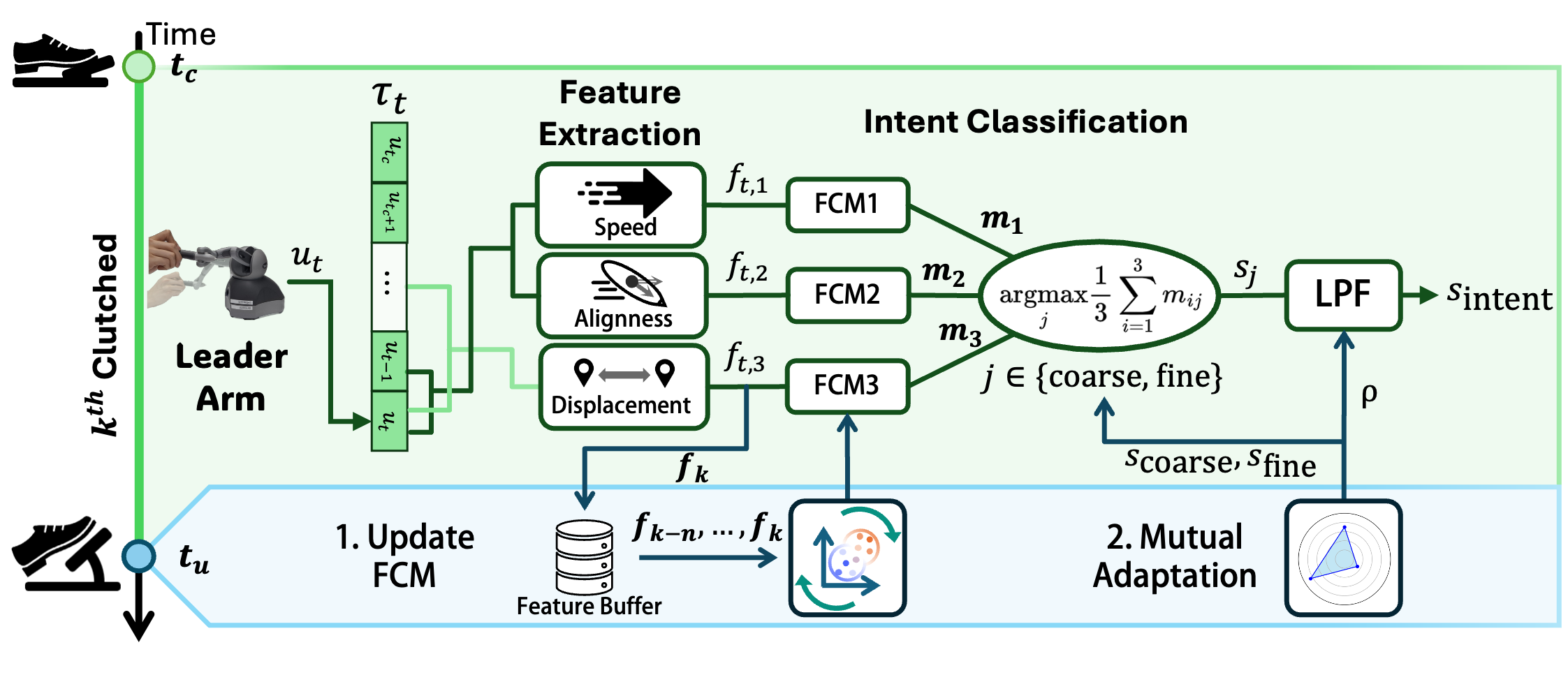
技术框架:SIMS系统主要包含以下几个模块:1) 运动特征提取:提取外科医生手部运动的线性速度、工具运动对齐程度和双臂协调性等特征。2) 运动意图分类:使用模糊C均值聚类算法,根据提取的运动特征将外科医生的运动意图分为不同的类别。3) 运动缩放因子调整:根据分类结果,动态调整每个手臂的运动缩放因子。4) 置信度更新:基于置信度的更新机制,独立地为双臂调整MSF,提高系统的鲁棒性。
关键创新:SIMS最重要的创新在于其动态调整MSF的机制。与传统的固定MSF方法不同,SIMS能够根据外科医生的运动意图实时调整MSF,从而在精度和效率之间取得更好的平衡。此外,SIMS使用模糊C均值聚类算法进行运动意图分类,能够更好地处理运动意图的不确定性。
关键设计:SIMS的关键设计包括:1) 运动特征的选择:选择线性速度、工具运动对齐程度和双臂协调性作为运动特征,这些特征能够较好地反映外科医生的运动意图。2) 模糊C均值聚类算法:使用模糊C均值聚类算法进行运动意图分类,允许一个运动状态属于多个意图类别,更符合实际情况。3) 基于置信度的更新机制:使用基于置信度的更新机制,独立地为双臂调整MSF,提高系统的鲁棒性。具体参数设置未知。
🖼️ 关键图片
📊 实验亮点
用户研究表明,与固定MSF相比,SIMS系统显著减少了碰撞(平均减少83%),降低了精神和身体负荷,并保持了任务完成效率。这些结果表明,SIMS是一种有效且实用的方法,可以提高远程机器人手术的安全性、效率和用户体验。
🎯 应用场景
SIMS系统可应用于各种远程机器人手术场景,尤其是在需要高精度和高效率的复杂手术中。该系统能够提高手术的安全性和效率,降低外科医生的操作负担,并有望推广到其他需要精确控制的远程操作领域,例如远程维修、危险环境处理等。
📄 摘要(原文)
Telerobotic surgery often relies on a fixed motion scaling factor (MSF) to map the surgeon's hand motions to robotic instruments, but this introduces a trade-off between precision and efficiency: small MSF enables delicate manipulation but slows large movements, while large MSF accelerates transfer at the cost of accuracy. We propose a Surgeon-Intention driven Motion Scaling (SIMS) system, which dynamically adjusts MSF in real time based solely on kinematic cues. SIMS extracts linear speed, tool motion alignment, and dual-arm coordination features to classify motion intent via fuzzy C-means clustering and applies confidence-based updates independently for both arms. In a user study (n=10, three surgical training tasks) conducted on the da Vinci Research Kit, SIMS significantly reduced collisions (mean reduction of 83%), lowered mental and physical workload, and maintained task completion efficiency compared to fixed MSF. These findings demonstrate that SIMS is a practical and lightweight approach for safer, more efficient, and user-adaptive telesurgical control.